沙漠地带场地平整机械的自动化施工研究
——GNSS-机械控制系统的应用分析
2021-05-14陈杨化李煜然陈传琪张锋凌吴春元
陈杨化 李煜然 陈传琪 张锋凌 吴春元 赵 辉
1. 中建三局第二建设工程有限责任公司 湖北 武汉 430074;
2. 上海电气集团股份有限公司 上海 201199
光热光伏发电作为一种新型的清洁能源,近年正在飞速发展。光热电站选址大多位于沙漠等阳光充足的地带,部分区域沙丘起伏、地势复杂,场地平整(下称“场平”)施工困难。阿联酋迪拜700 MW光热+250 MW光伏发电项目位于沙漠地带,在场平施工过程中,大范围运用了机械自动化控制系统[1-6]。本文以此为依托,进行GNSS(全球导航卫星系统)-机械控制系统的应用研究,为今后类似项目提供了解决思路,值得推广借鉴。
1 工程概况
迪拜700 MW光热+250 MW光伏发电项目地处沙漠腹地,场平总面积约44 km2,分为CT、PT1、PT2、PT3共4个区块。整个场地除部分盐碱地带较为平缓外,其他区域均为高低起伏的沙丘,地势多变,最大高差达40 m。
设计规范及图纸要求场平完成后,地面坡度控制在1%以内,这种沙漠地带大面积场平施工可以视为整个项目的重、难点之一。对此,本项目采用GNSS-机械控制系统对场平施工机械进行了改造,改造的机械包括平地机和推土机。
2 工作准备
首先,通过无人机扫描系统得到场地原始地形图(精确度达到0~2 cm)。原始地形图一是用作建立土方平衡图并计算出场内高处需要挖出的土方量和低处需要填进的土方量;二是与Civil 3D软件建立的设计施工图模型一起导入GNSS-机械控制系统。
经过以上步骤,确定场平施工的基本部署和工作计划。
3 工作原理及特点
GNSS-机械控制系统将地形图和设计模型结合后,生成命令确定每个点的最终标高。施工时,现场标高不断发生变化,安装在机械工作部位的接收装置不停地将现场实时工况反馈回来,经过系统终端处理后,又变成新的指令下达给各机械,如此反复,直至场平标高达到设计标高,此区域施工完成。
自动分析:GNSS-机械控制系统通过地形图和设计模型的对比自动建立施工模型,得出现场每处位置需要进行填或挖的作业高差。根据施工过程中定位系统的反馈,实时更新施工模型。
自动测量:GNSS-机械控制系统可以自动测量定位机械位置以及铲刀的标高、倾角。系统根据该机械位置在施工模型上的作业高差对其下达相应的指令;根据铲刀标高更新施工模型;根据铲刀倾角对控制系统进行微调。
自动控制:GNSS-机械控制系统可以根据指令自动控制液压阀门,从而控制铲刀的上下运动和旋转运动,无需人工控制。
总而言之,GNSS-机械控制系统可以针对不同位置自动进行调节,而操作手只需要根据管理人员的安排,在指定的施工区域保证机械设备匀速前进,最终达到机械自动化施工的效果。
4 GNSS-机械控制系统的组成
GNSS-机械控制系统由控制系统、定位系统、通信系统组成,通过安装管理软件、控制终端、通信接收器、GNSS信号接收器得以实现。
使用GNSS-机械控制系统对场平机械进行实物改造,在铲斗位置加装定位系统;在驾驶室安装控制系统及通信系统(图1)。

图1 GNSS-机械控制系统示意
4.1 控制系统——管理软件MAGNET Project
管理软件是GNSS-机械控制系统的“大脑”(图2)。首先使用无人机遥感测绘场地地形图,管理软件根据地形图建立施工模型,并通过通信系统发送至现场施工机械的控制终端,机械将按照管理软件的指令进行运作。若作业过程中有设计变更,则管理软件修改施工模型,施工机械收到的作业指令同步更新。施工指令由“对人多次交底”改为“对机械一次交底”,信息传递更加快速、准确,施工效率提高。
图2 管理软件(MAGNET Project)
此外,现场施工的数据也会通过通信系统反馈回管理软件(图3),管理人员可以准确地知道现场实时工况,根据施工计划,及时纠偏。
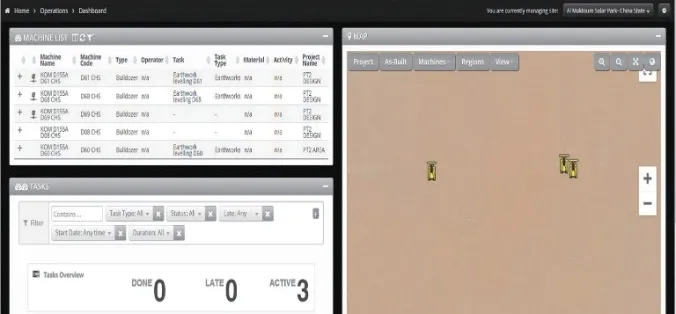
图3 管理系统操作界面
4.2 定位系统
定位系统是GNSS-机械控制系统的“眼睛”。分为2个单元,即惯性传感器(IMU)和GNSS接收器(图4)。

图4 IMU和GNSS接收器
IMU弥补GNSS系统对信号强度依赖大的缺点,GNSS能降低IMU测量的累计误差。定位系统将二者结合,能实时、准确地获取机械的位置及铲刀的标高、倾角和偏转等详细工况。作业过程中,定位系统测量频率达到100 Hz(若机械以最高速度10.8 km/h运行,每米测量密度仍可达到33次),施工速度和精度提高显著,且对于人工测量困难的沙漠地带适应性高。
4.3 控制系统
控制系统是GNSS-机械控制系统的“四肢”,包括控制终端和液压控制阀。
控制终端实时监控每一台机械的现场作业情况。每台机械的实时位置、运行路线、坡度及速度,均可在屏幕中同步显示(图5)。值得注意的是,在图5中,右侧显示机械铲斗与设计标高的高差值,当刻度显示为0时,说明此处施工已完成。
液压控制阀接受控制终端的信息,按照指令控制油缸,完成铲刀的自动升降和转动,实现了施工的自动化,快速而准确地完成施工指令。
4.4 通信系统
通信系统是GNSS-机械控制系统的“嘴巴”,包括通信接收器和通信模块(图6),通过UHF(特高频)、CDMA(码分多路访问)、GSM(全球移动通信系统)等多种通信手段,在各系统之间实时传递数据。

图5 终端显示界面

图6 通信模块
5 应用情况
迪拜700 MW光热+250 MW光伏电站通过GNSS-机械改造系统的使用,场平施工节点稳步推进,验收通过率高,实现零返工。
现对推土机以GNSS系统改造前后的施工效益和成本进行对比分析。选定PT1中2个地块,其原始地貌类型均为沙丘地带,面积尺寸一致,网格长宽为250 m×150 m,面积37 500 m2,回填7层,每层平均15 cm。各分配3台卡特D65推土机械,无GNSS-机械改造系统的推土机还需配备2名测量人员进行辅助作业。试验数据如表1所示。

表1 回填记录
根据迪拜当地机械租赁价格,卡特D65推土机的月租金为28 000迪拉姆(“迪拉姆”为阿联酋通用货币单位,28 000迪拉姆约合人民币51 002元),GNSS-机械控制系统的月租金为9 500迪拉姆(约合人民币17 304元),当地测量人员每月薪资为3 000迪拉姆(约合人民币5 464元)。
使用GNSS-机械改造系统改造后的单位成本1为:

其中,总成本=(28 000+9 500)×3=112 500迪拉姆(约合人民币204 918元),面积=37 500 m2,耗时=2.77×7=19.4 d。
未使用GNSS-机械改造系统改造的单位成本2为:

其中,成本=28 000×3+3 000×2=90 000迪拉姆(约合人民币163 935元),面积=37 500 m2,耗时=5.90×7=41.3 d。
成本对比数据如表2所示。

表2 成本对比
由此可知,由于机械效率的大幅提高,单位成本可相对降低42%。
6 结语
本文以迪拜700 MW光热+250 MW光伏发电项目场平施工为例,介绍了一种沙漠地带场平机械自动化施工的方法。使用GNSS-机械控制系统改造机械,可以很好地解决地貌复杂的沙漠地带场平施工时,测量困难、机械效率低下的难题,其标高控制自动化的特点使施工机械效率与场平作业精度得到了提高。
此外,该改造机械夜间能正常施工的优势,同样具有可观的经济价值,对今后类似项目的施工具有借鉴意义。本工艺也具有一定的局限性,如在原地貌较为平整的场平施工作业中,优势不明显,不推荐使用。
