平面相控阵超大角度扫描的阵因子分析*
2021-05-14胡昌海王任陈传升王秉中
胡昌海 王任 陈传升 王秉中
(电子科技大学应用物理研究所, 成都 611731)
目前学者们普遍认为, 平面相控阵的方向性系数在扫描过程中按照余弦规律变化, 无法实现从侧射到端射的大角度范围波束扫描.为了明晰面阵扫描方向图的变化规律, 本文从阵因子的严格公式出发, 分析了不同规模平面相控阵的方向性系数随扫描角度的变化, 并将由严格阵因子公式得到的方向性系数变化趋势与余弦规律进行了比较.分析表明, 有限大面阵的方向性系数在近端射区域不满足余弦变化规律, 且在端射区域不为零.基于上述结论, 本文进一步提出了采用单元方向图赋形弥补阵因子方向性系数变化的思路, 为平面相控阵实现超大角度范围波束扫描指明了方向.
1 引 言
当前通信雷达系统中所使用的相控阵天线通常只能在 ± 45°或 ± 60°范围内进行有效扫描[1−6].具有大角度扫描能力的相控阵可以极大地提高军、民用系统的性能、降低阵面数量, 因此, 大角度扫描相控阵研究受到了学界的普遍关注[2−8].
影响平面相控阵天线波束扫描范围的因素主要有3 个: 1) 波束扫描过程中阵因子方向性系数的变化; 2) 阵元方向图的形状和覆盖范围; 3) 阵列波束扫描过程中端口阻抗的变化.在阵元方向图研究方面, 学者们已经基于方向图可重构原理、镜像原理等提出了大量拓展阵元波束覆盖范围的方法[7−14], 其中, Wang 等[11,12,14]和Wen 等[13]通过分析基本天线单元提出了构造一维、二维宽波束方向图的有效方法, 并利用该方法成功将线阵的波束扫描范围拓展至 ± 85°以上、将面阵的波束扫描范围拓展至 ± 75°以上.在相控阵端口阻抗匹配方面, 学者们已经提出了超表面匹配层方法、匹配电路方法等有效方法, 并基于这些方法成功减小了阵列波束扫描过程中的端口阻抗变化、实现了大角度波束扫描范围内的阻抗匹配[15−19].
在阵因子研究方面, 著名相控阵学者Elliott于1963 和1964 年对直线阵[20]和平面阵[21]波束扫描过程中的方向性系数变化进行了理论研究, 并推导出了直线阵和平面阵方向性系数随扫描角度的变化, 其得出的平面相控阵的方向性系数为D=πDxDycosθ0, 式中,θ0为阵列的主波束指向角(记平面阵的法向为0°),Dx和Dy分别为沿x和y轴排列的两个直线阵列的侧射的方向性系数.随后, 很多经典教科书都采用了Elliott 推导的上述结论.因此, 学者们目前普遍认为, 因为平面阵列的方向性系数在扫描过程中按照余弦规律变化, 当波束扫描到近端射范围时, 方向性系数下降为0, 所以平面相控阵无法实现从侧射到端射的大角度范围波束扫描.这种观点的普遍存在极大地限制了大角度扫描相控阵的研究和发展.然而, 上述观念是对Elliott 结论的误解, 因为上述公式是建立在一定条件之下的近似公式[20,21], 其成立的前提为: 1) 大阵列, 即阵元数量足够多、阵列波束足够窄; 2) 阵列波束不扫描到距端射方向几个波瓣宽度之处.
本文从阵因子的严格公式出发, 分析了不同规模线阵、面阵的方向性系数随扫描角度的变化, 并将由面阵严格阵因子公式得到的方向性系数变化趋势与余弦规律进行了比较.分析表明: 1) 线阵方向性系数的变化规律依赖于阵元间距, 当阵元间距等于半波长时, 阵列的方向性系数不随扫描角度变化, 当阵元间距小于半波长时, 阵列的方向性系数随扫描角度增加.也就是说, 线阵的阵因子不是限制波束扫描范围的因素, 只要解决了单元方向图和端口阻抗匹配问题, 就能够实现线阵的大角度扫描; 2) 有限大面阵的方向性系数随着扫描角度的增加而减小, 但在近端射区域不满足余弦变化规律, 而且, 阵列规模越小, 不满足余弦变化规律的角度范围就越大.基于上述结论, 根据方向图乘积定理, 本文进一步提出了采用单元方向图赋形弥补阵因子方向性系数变化的思路, 为平面相控阵实现超大角度范围波束扫描指明了方向.
2 基于严格阵因子公式分析平面均匀天线阵的方向性系数
2.1 直线阵(一维)方向性系数与波束扫描角的关系
设一N元线性沿z轴放置, 单元间距为d, 如图1 所示.若单元电流幅度为In, 各单元间相对相位差均为α= -kdcosθ0, 此处的θ0为阵列的波束指向角, 则直线阵阵因子可以表示为
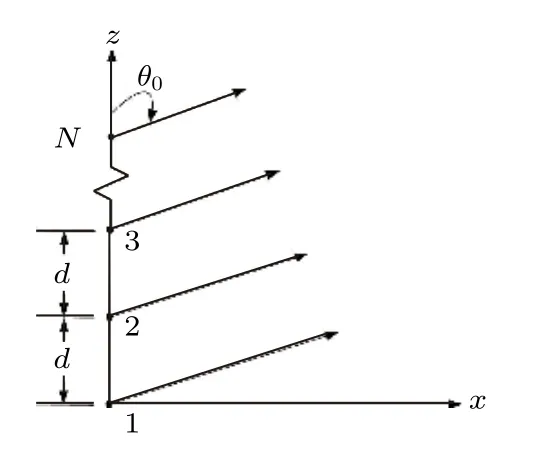
图1 N 元直线阵示意图Fig.1.An N-elements linear array.
其最大方向性系数可以严格表示为
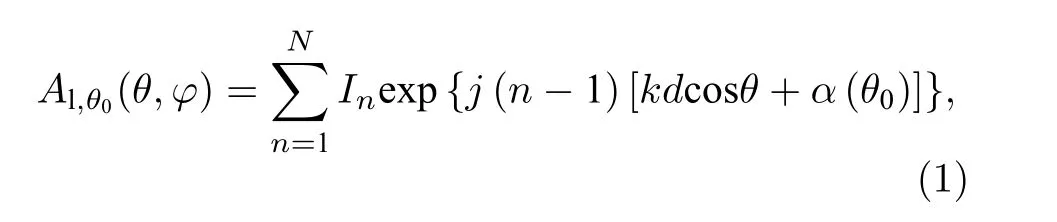
为了定量分析一维阵列阵因子大角度扫描的规律, 分析了不同阵列规模、不同单元间距的阵列在不同扫描角度时阵因子的最大方向性系数, 如图2 所示.在实际的大角度扫描阵列中, 为了避免栅瓣, 阵元间距一般都小于0.5λ, 因此本文不讨论阵列间距大于0.5λ的情况, 此处λ为自由空间波长.为了方便对比, 图2 中的方向性系数曲线都按照对应阵列在单元间距为0.5λ时侧射波束的方向性系数进行了归一化.图中90°为侧射方向, 0°为端射方向.从图2 可以看出, 当单元间距为0.5λ时, 其方向性系数不随扫描角度变化.当阵元间距为0.1λ, 0.2λ, 0.3λ, 0.4λ和0.489λ时, 一维阵因子的方向性系数均会随着扫描角度的增加而增加.特别地, 当阵元间距小于0.4λ时, 一维阵因子的方向性系数在端射方向均比边射方向约大3 dB, 只有当阵元间距接近0.5λ时(0.489λ), 该数值才会发生明显变化.这表明, 要利用阵因子弥补单元方向图在端射附近的增益下降, 并不需要非常小的阵元间距, 这对线阵实现超大角度扫描非常有利.并且, 当单元间距小于等于0.5λ时, 直线阵方向性系数的变化都与余弦规律无关, 这和Elliott关于线阵的分析是吻合的[20].从图2 的结果来看,对于直线阵来说, 阵因子并非限制阵列大角度扫描特性的因素, 只要单元方向图波束宽度足够, 端口阻抗随扫描角度变化较小, 就能够实现大角度扫描, 现已有诸多研究基于上述思路实现了线阵的大角度扫描, 甚至超大角度扫描[11,13].因为很多文献将扫描范围大于 ±45°的阵列都称为大角度扫描阵列, 为了加以区分, 本文将具有从侧射扫描到近端射方向能力的阵列称为超大角度扫描阵列.
2.2 平面阵(二维)方向性系数与波束扫描角的关系
图2 一维阵因子在不同阵元间距扫描时的归一化方向性系数随扫描角度的变化 (a) 一维阵列尺寸为8λ; (b) 一维阵列尺寸为16λ; (c) 一维阵列尺寸为32λ; (d) 一维阵列尺寸为64λFig.2.Normalized directivity of the linear array factor varies with different element spaces and different scanning angles: (a) The size of the linear array factor is 8λ; (b) the size of the linear array factor is 16λ; (c) the size of the linear array factor is 32λ; (d) the size of the linear array factor is 64λ.
设一矩形栅格平面阵列, 其单元按矩形栅格排列在xy平面上, 如图3 所示.该平面阵在沿x轴方向有(2Nx+ 1)列, 列间距为dx; 在沿y轴方向有(2Ny+ 1)行, 行间距为dy.dx与dy可以相等也可以不等.第0-0 个单元为坐标原点, 第(m,n)单元(即第m行、第n列交叉栅格上的单元)的坐标位置为(mdx,ndy), 其中–Nx≤m≤Nx, –Ny≤n≤Ny.设单元(m,n)的激励电流幅度为Imn, 与中心单元的相位差为αmn, 则平面阵阵因子可以表示为
其最大方向性系数可以严格表示为
图3 平面阵列示意图Fig.3.A planar array.

图4 平面阵阵因子归一化最大方向性系数随扫描角度的变化情况(φ = 0°) (a) 8λ × 8λ 阵列; (b) 16λ × 16λ 阵列; (c) 32λ ×32λ 阵列; (d) 64λ × 64λ 阵列; (e) 128λ × 128λ 阵列; (f) 256λ × 256λ 阵列Fig.4.Normalized directivity of the planar array factor varies with different element spaces and different scanning angles (φ = 0°):(a) The size of the planar array factor is 8λ × 8λ; (b) the size of the planar array factor is 16λ × 16λ; (c) the size of the planar array factor is 32λ × 32λ; (d) the size of the planar array factor is 64λ × 64λ; (e) the size of the planar array factor is 128λ × 128λ;(f) the size of the planar array factor is 256λ × 256λ.
为了简化分析, 设dx=dy=d, 考查阵列波束在xoz面扫描时的方向性系数变化, 如图4 所示.为了方便对比, 图4 中的方向性系数都按照对应阵列在单元间距为0.5λ时侧射波束的最大方向性系数进行了归一化.根据图3 中的坐标系, 图4 中0°为侧射方向, 90°为端射方向.根据计算得到, 当阵元间距分别小于0.43λ, 0.45λ, 0.46λ, 0.475λ,0.485λ和0.495λ时, 尺寸为8λ× 8λ, 16λ× 16λ,32λ× 32λ, 64λ× 64λ, 128λ× 128λ和256λ×256λ的二维阵因子的方向性系数比对应阵元间距为0.5λ时的阵列在端射时的方向性系数增加约3 dB.而且随着阵元间距的减小, 方向性系数会慢慢增加, 但是增加的幅度很小.这与一维阵因子在不同阵元间距扫描时的情况类似.从图4 可以看出, 阵列扫描波束的最大方向性系数在侧射方向附近按照余弦规律变化, 但当波束扫描至近端射附近时, 阵列的方向性系数不再按照余弦下降, 而是略有上升.在端射方向, 最大方向性系数并不为零:当单元间距分别为0.43λ, 0.45λ, 0.46λ, 0.475λ,0.485λ和0.495λ时, 尺寸为8λ× 8λ, 16λ× 16λ,32λ× 32λ, 64λ× 64λ, 128λ× 128λ和256λ×256λ的阵列在端射方向的方向性系数比侧射方向分别下降4 dB, 5.6 dB, 7.2 dB, 8.8 dB, 10.4 dB和12 dB; 当单元间距为0.5λ时, 尺寸为8λ× 8λ,16λ× 16λ, 32λ× 32λ, 64λ× 64λ, 128λ×128λ和256λ× 256λ的阵列在端射方向的方向性系数比侧射方向分别下降7 dB, 8.6 dB, 10.2 dB,11.8 dB, 13.4 dB 和15 dB.端射附近最大方向性系数的非零特性为实现超大角度扫描相控阵提供了可能.
当阵列尺寸为8λ× 8λ, 16λ× 16λ, 32λ×32λ, 64λ× 64λ, 128λ× 128λ和256λ× 256λ时,其扫描波束的归一化最大方向性系数曲线分别在70°, 75°, 80°, 85°, 86°和87°范围内与余弦曲线重合.该趋势说明阵列越大, 其最大方向性系数与余弦曲线重合的角度范围就越大, 这和Elliott 的大阵列假设是吻合的.此外, 从图4 可以明显地看出,当单元间距小于一定的间距时阵列在端射附近的最大方向性系数比单元间距为0.5λ时端射附近的最大方向性系数更大, 也就是说, 小单元间距有利于实现大角度扫描, 这与近年来学者们利用紧耦合阵列实现二维大角度扫描的现象是吻合的[18,19].值得说明的是, 图4 展示的阵列包含了数百到数万个单元, 甚至二十六万个单元, 已经是实用系统中的大规模或者超级大规模阵列了.因此, 本节的结论对实用性阵列是适用的.
当φ为不同值时, 各尺寸面阵阵因子的归一化方向性系数随扫描角度的变化情况, 如图5 所示.由于正方形面阵在φ为0°—90°内的扫描特性关于φ= 45°对称, 因此只给出了φ为0°—45°的扫描特性.从图5(a)和图5(b)的0.5λ单元间距可以看出, 在φ为0°到45°内时, 在端射处的方向性系数会随着φ值的增加而增加到3 dB.从图5(c)和图5(d)的0.4λ单元间距可以看出, 在φ为0°到45°内时, 在端射处的方向性系数也会随着φ值的增加而小幅增加.上述现象是由矩形栅格阵列在不同φ方向上的投影阵元间距不同造成的.例如, 若矩形栅格阵列在x和y方向的阵元间距均为d, 则在φ= 45°方向上的投影阵元间距则为从图4 可以看出, 阵元间距越小, 端射附近的方向性系数越大.因此,φ= 45°面内端射附近的方向性系数比φ= 0°面的方向性系数更大.
图5 平面阵阵因子归一化最大方向性系数在不同单元间距和不同φ 值时随扫描角度的变化情况 (a) 16λ × 16λ 阵列(d =0.5λ); (b) 32λ × 32λ 阵列(d = 0.5λ); (c) 16λ × 16λ 阵列(d = 0.4λ); (d) 32λ × 32λ 阵列(d = 0.4λ)Fig.5.Normalized directivity of the planar array factor varies with different element spaces, different scanning angles, and different φ: (a) The size of the planar array factor is 16λ × 16λ (d = 0.5λ); (b) the size of the planar array factor is 32λ × 32λ (d =0.5λ); (c) the size of the planar array factor is 16λ × 16λ (d = 0.4λ); (d) the size of the planar array factor is 32λ × 32λ (d = 0.4λ).
众所周知, 阵列的方向性系数是由阵因子和单元方向图共同决定的, 即方向图乘积定理F(θ,φ)=f(θ,φ)·AF(θ,φ) , 其 中,f(θ,φ) 表 示 单元电场方向图,AF(θ,φ) 表示阵因子方向图.一般具有大地板的天线单元具有典型的侧射方向图, 即在侧射方向的增益远大于在端射附近的增益[2,15].从图5 的分析可知, 面阵阵因子的方向性系数曲线也是侧射方向大于端射附近.由方向图乘积原理可知, 上述单元方向图和阵因子方向图相乘的结果是, 侧射方向扫描方向性系数远大于端射附近, 这就是通常面阵无法实现大角度扫描的原因.
从图5 的分析可知, 虽然面阵阵因子在端射附近的最大方向性系数小于侧射方向, 但其并不为零, 这表明实现大角度扫描是可能的.一种实现大角度扫描的思路是, 通过单元方向图对阵因子方向性系数进行弥补, 进而增加阵列天线在扫描空间内最大方向性系数的平坦度.虽然尚未有文献明确提出这一思路, 但已有文献在实现大角度扫描的过程中不自觉地应用了该思路[9,10,14,22,23].文献[9, 10]基于可重构技术实现了大角度扫描, 观察文中重构的几种单元方向图可知, 其指向侧射附近的单元方向图的增益比指向非侧射附近的单元方向图的增益小, 这种分布的单元方向图可以在一定程度上弥补大角度扫描时阵因子方向性系数的下降.文献[14]基于镜像原理和三磁流原理构建了宽波束单元, 其单元方向图具有侧射方向小于近端射方向的特点,这和使用单元方向图弥补阵因子方向性系数的思路是吻合的.与文献[9, 10, 14]类似, 文献[22, 23]尚未从理论上分析超大角度扫描.虽然上述文献不自觉地应用了单元方向图弥补的思路, 但在做出那些工作时只是为了拓展单元方向图的波束覆盖范围, 没有意识到单元方向图弥补的原理在最终结果中起到了重要作用, 而本文通过理论分析明确阐述了这一思路和原理.本文提出的方法具有两点优势: 1) 在思路上, 上述文献只是为了拓展单元方向图的波束覆盖范围, 尚未发现单元方向图弥补的原理, 而本文通过理论分析明确阐述了这一思路和原理; 2) 在效果上, 上述文献因为没有单元方向图弥补的思路, 所以其单元方向图只是具有边射略微凹陷的特点, 并不具有超宽角扫描所需的近端射增益增大的特性(文献[9, 10]为线阵, 根据图2 的分析,无需单元方向图弥补就能实现大角度扫描), 而基于本文所提明确的思路的面阵将可以实现达到近端射范围的波束扫描.因此, 本文具有理论和实践双重意义.
3 结 论
本文分析了面阵阵因子方向性系数在波束扫描过程中的变化规律, 并据此提出了一种实现平面阵列超大角度波束扫描的思路.首先, 从阵因子的严格公式出发, 分析了不同规模线阵、面阵的方向性系数随扫描角度的变化, 并将由面阵严格阵因子公式得到的方向性系数变化趋势与余弦规律进行了比较.分析表明, 线阵的阵因子不是限制波束扫描范围的因素, 只要解决了单元方向图问题和端口阻抗匹配问题, 就能够实现线阵的大角度扫描; 有限大面阵的方向性系数在近端射区域不满足余弦变化规律, 实现面阵超大角度范围扫描是可能的.基于上述分析, 本文提出了采用单元方向图赋形弥补阵因子方向性系数变化的思路, 为平面相控阵实现超大角度范围波束扫描指明了方向.
