预警机无坡度转弯对巡逻时间性能影响
2021-05-14任江涛商立英明亚丽
张 超, 任江涛, 商立英, 王 伟, 明亚丽
(航空工业第一飞机设计研究院, 西安 710089)
现代战争中,制空权的掌握对战争的成败起着重要的作用。预警机承担预警探测和指挥引导的作用,是空军掌握空勤信息和作战指挥系统的重要组成部分,对掌握制空权至关重要[1-2]。理想情况下预警机的机载雷达应避免干扰,但由于自身的设计特点、载机机体的遮挡、飞机飞行姿态的变化等因素会导致雷达存在一定的探测盲区。对于特定型号预警机,雷达和飞机是固定不变的,飞机飞行姿态则在飞行过程中变化可控。
研究表明,预警机机载雷达的探测范围是基于水平飞行姿态进行设计,当预警机带坡度转弯飞行时,机载雷达的探测范围将发生变化,飞机侧上方及侧下方形成探测盲区,此盲区对预警机会造成一定威胁[3],因此为便于预警、搜索,一般要求预警机具备无坡度转弯功能[4]。 巡逻飞行是预警机任务剖面的主要组成部分,其执行任务时,常用的有平行线形航线或水平横“8”字形航线,特殊情况还会环绕重点保卫目标飞行[5-7]。巡逻时间是衡量预警机任务性能的一个重要指标,预警机巡逻任务中转弯飞行较其他飞机占有较大比例,无坡度转弯飞行的耗油率直接影响飞机巡逻的时间性能。研究无坡度转弯对飞机巡逻时间性能的影响规律对预警机巡逻任务剖面的设计及飞行任务的规划具有重要指导意义,因此有必要开展无坡度转弯对飞机巡逻时间性能的影响分析。
目前飞机无坡度转弯方面的相关研究较少,耿建中等通过动力学建模分析了无坡度转弯时的初步控制算法[8],但并未考虑发动机不对称推力的影响;张宁[4]研究通过控制发动机不对称推力来实现预警机无坡度转弯功能并进行仿真验证。上述研究主要从无坡度转弯控制方法和功能实现展开,并未涉及无坡度转弯对飞机巡逻性能的影响研究。
现在综合考虑发动机不对称推力作用的同时,根据预警机无坡度转弯特点,建立无坡度转弯模型并通过受力分析得出其动力平衡方程;其次,针对动力方程进行计算方法分析,得出飞机无坡度转弯时耗油率计算流程,进而得出相对于平飞状态耗油率的增量百分比及巡逻时间的变化量;最后,采用控制变量法结合计算流程分析转弯角速率、飞行高度、发动机推力差量变化时,飞机无坡度转弯耗油率增量和巡逻时间的变化规律,得出无坡度转弯对巡逻时间性能的影响规律。
1 无坡度转弯动力学模型
常规飞机盘旋转弯时,飞机压坡度,通过升力产生水平分量提供向心力。飞机无坡度转弯时,升力和重力平衡,保持高度,升力无法产生飞机转弯所需的水平分量,只有通过产生侧力来提供转弯向心力,如图1所示。
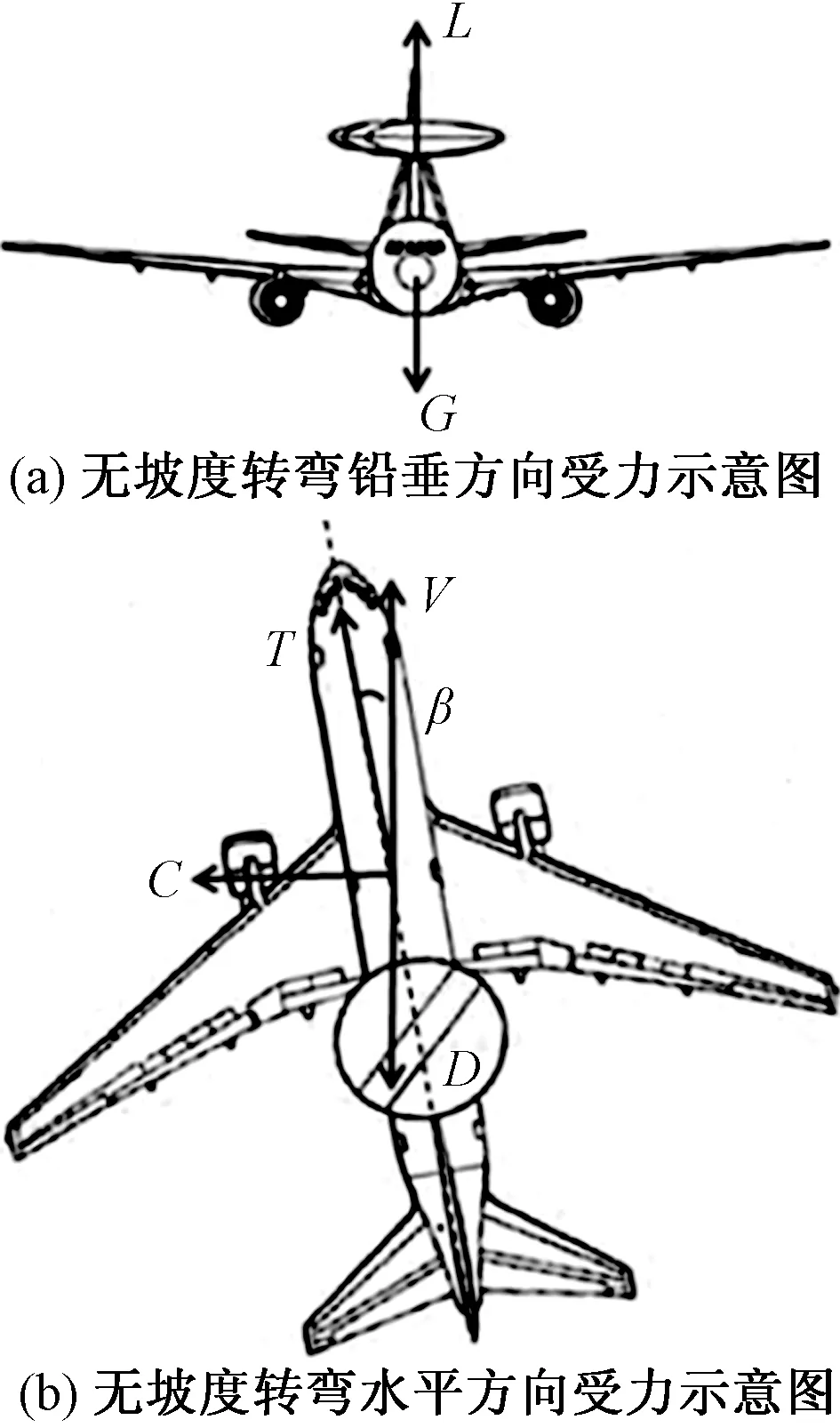
图1 无坡度转弯受力示意图

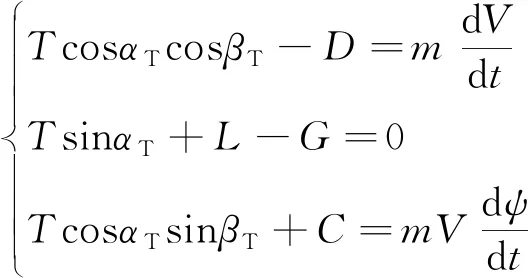
(1)
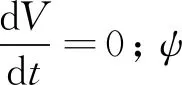
飞机一般飞行中迎角较小,因此工程研究中可近似取sinα=0, cosα=1,本文研究中发动机推力在升力方向的分量影响忽略不计。则进一步可得飞机平飞转弯时的动力方程为
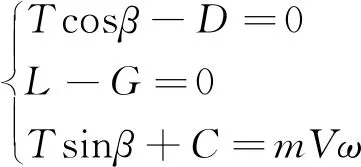
(2)
式(2)中:ω为转弯角速率。
由飞机无坡度转弯动力方程可知,飞机无坡度转弯时,通过侧力和发动机推力在转弯半径方向上的分量提供向心力。其中发动机推力分量Tsinβ与侧滑角大小相关,侧力C亦由侧滑产生,故飞机无坡度转弯时主要受飞机侧滑角大小影响。
对于常规布局飞机,主要通过偏转方向舵,使飞机产生偏航力矩并发生侧滑,从而产生侧力和推力分量,提供转弯向心力,满足飞机无坡度转弯需求。
对于多发飞机,可通过调节两侧发动机的推力大小,形成不对称发动机推力,产生偏航力矩,使得飞机侧滑,产生向心力。发动机推力差动控制和方向舵偏转相配合,可使飞机侧滑角增大,提供较大的向心力(图2)。
如图2所示,发动机推力差动作用下产生偏航力矩NT,其力矩表达式为[9-10]
NT=(TL-TR)dl
(3)
式(3)中:TL、TR分别为飞机左、右发动机推力;dl为发动机轴线到机体对称面的距离。
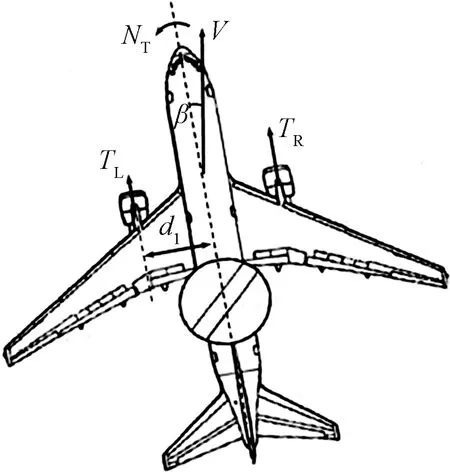
图2 发动机不对称推力横向偏航示意图
假设飞机左侧发动机推力状态给定,由式(2)、式(3)可得,飞机无坡度转弯时发动机推力产生的偏航力矩系数和飞机侧力系数为
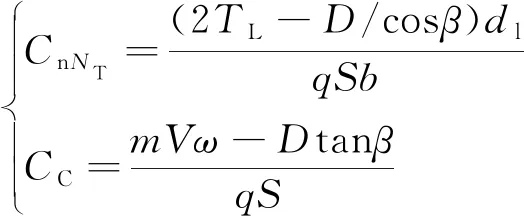
(4)
式(4)中:CnNT为发动机推力偏航力矩系数;CC为飞机侧力系数;q为动压,等于1/2ρV2;S为机翼面积;b为机翼展长。
飞机以固定角速度和转弯半径进行无坡度转弯时,自身偏航力矩和滚转力矩保持平衡状态。假定飞机转弯条件下,方向舵偏角为δr,副翼偏角为δa,飞机侧滑角为β,其中侧滑角,机头左偏为正,方向舵偏角向左为正,右副翼偏角后缘下偏为正,则有如下力和力矩系数平衡关系式。
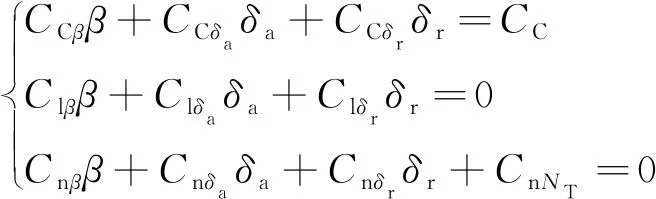
(5)
式(5)中:CCβ、CCδa、CCδr、Clβ、Clδa、Clδr、Cnβ、Cnδa、Cnδr分别为侧力导数、滚转力矩导数、偏航力矩导数。
实际上,副翼偏角主要影响滚转力矩,对偏航力矩和侧力影响量极小,仅为侧滑角和方向舵偏角的影响量的1%~3%,因此在本文的分析中忽略副翼偏角对偏航力矩和侧力的影响量。将式(4)代入式(5),可得飞机无坡度转弯时的力和力矩系数平衡方程如下:
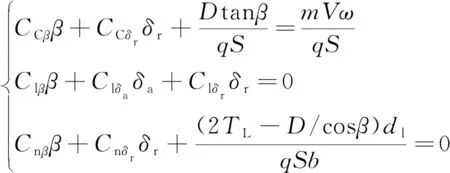
(6)
2 飞机无坡度转弯计算流程
参考飞机无坡度转弯动力平衡方程可知,飞机无坡度转弯时,通过控制发动机推力差动、方向舵偏转提供偏航力矩,同时副翼偏转保持平衡。
假定飞机转弯时飞机重量、飞行速度、高度、转弯角速率等已知,通过飞机飞行阻力和控制发动机推力状态,可求得飞机侧滑角和舵面偏角;飞机侧滑角和舵面偏转产生气动力增量,进而导致发动机推力改变;新的飞机阻力和发动机推力求解得出新的侧滑角和舵面偏角。因此飞机转弯时舵面偏角和发动机推力无法直接求取,需迭代求解,进一步得出飞机无坡度转弯时燃油消耗率。为便于研究,本文计算分析中假设飞机向左转弯,给定飞机左侧发动机推力状态,得出具体求解步骤如图3所示。
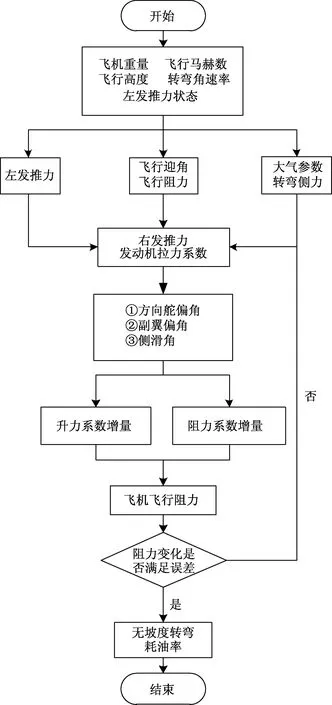
图3 无坡度转弯计算流程
按照无坡度转弯计算流程,计算飞机无坡度转弯耗油率,对比同等条件下飞机平飞耗油率,可得出飞机无坡度转弯时耗油率增加百分比ΔFuelF,则给定油量下,飞机无坡度转弯巡逻相对于平飞巡逻时间变化量计算如式(7)所示。
(7)
式(7)中:ΔT为无坡度转弯时巡逻时间变化量。由公式(7)可知,无坡度转弯耗油率增加导致飞机巡逻时间性能降低,且耗油率增加百分比越大,巡逻时间性能降低越多,因此通过计算分析无坡度转弯时油耗的变化量,可得出其对飞机巡逻时间的影响。后续计算中耗油率增加百分比均表示飞机无坡度转弯相对同等状态下平飞耗油率的百分比增加量。
3 无坡度转弯巡逻时间性能影响因子敏度分析
由飞机无坡度转弯方程分析可知,转弯角速率、飞机重量、飞行高度、飞行速度、发动机不对称推力大小等都会影响无坡度转弯时飞机耗油率,为研究不同因子影响下,飞机无坡度转弯耗油变化规律,现采用控制变量法,以外国某飞机模型为例,给定飞机无坡度转弯飞行状态,按照无坡度转弯计算流程,计算无坡度转弯飞机耗油率,得出其相对于平飞状态耗油率增加百分比,进而可分析其对巡逻时间影响规律。
3.1 转弯角速率影响分析
考虑发动机推力差动控制,给定飞机左发推力为0.4额定推力状态,计算0.34马赫数、6000 m飞行高度时,飞机不同转弯角速率和重量下无坡度转弯耗油率,对比相同条件平飞状态,得出无坡度转弯耗油率增加百分比的变化规律。预警机转弯角速率一般较小,此处计算取0.2~0.8(°)/s,计算结果如图4所示。
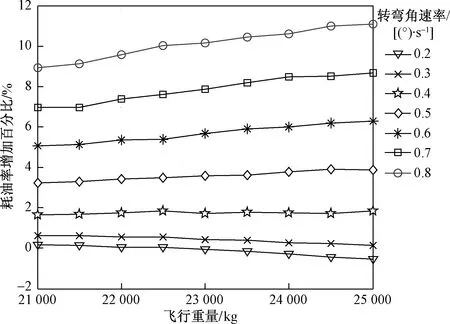
图4 耗油率增加量随飞机转弯角速率变化规律
观察图4计算结果,飞机无坡度转弯,在角速率较小(0.2、0.3)时,耗油率与平飞相比变化不大,随着转弯角速率增大,耗油率增加。角速率大于0.3时,同等飞行重量,飞机转弯角速率每增加0.1(°)/s,耗油率相比于平飞增大约2%;在0.8(°)/s角速率时,耗油率增量可达10%~12%,此时,相同燃油重量下飞机无坡度转弯相比于平飞巡逻时间减少9.1%~10.5%。较大转弯角速率下,耗油率增量随重量增大而增加,则巡逻时间随重量增大而减少。
上述变化规律的产生主要是随着重量、转弯角速率增加,飞机为保持转弯平衡状态,侧滑角和舵面偏角增大,飞机阻力和需用推力增加,导致无坡度转弯时耗油率增加。小转弯角速率时,飞机转弯所需侧滑角较小,此时飞机发动机推力差量产生的偏航力矩超过转弯所需,方向舵需右偏进行力矩平衡,且随重量增加,方向舵右偏增大,如图5所示,导致转弯需用推力减小,使得转弯耗油率降低且在大重量时小于平飞耗油率。
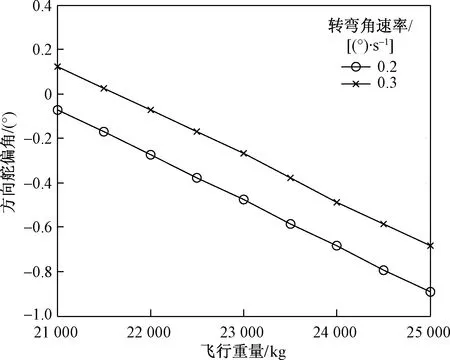
图5 角速率为0.2/0.3时无坡度转弯方向舵偏角
3.2 飞行高度影响分析
飞机飞行高度不同,飞机转弯耗油率也不同。给定转弯角速率为0.5(°)/s,马赫数0.34,左侧发动机为0.4额定推力,计算不同飞行高度和重量下,飞机无坡度转弯耗油率增加百分比的变化趋势,计算结果见图6所示。
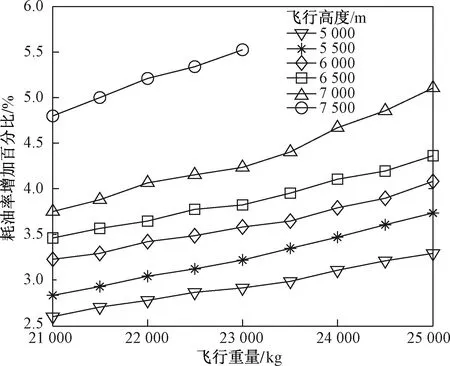
图6 无坡度转弯耗油率增加百分比随高度变化规律
由图6计算结果可知,给定条件下,飞机无坡度转弯时耗油率增量百分比随高度增加而增加,巡逻时间性能随高度增加而降低。由无坡度转弯平衡方程可知,给定重量、飞行马赫数、转弯角速率时,飞机飞行真空速、空气密度随高度增加而减小,计算分析可知无坡度转弯时飞机侧滑角、舵面偏角随着高度增加而增大,飞机相对平飞时的需用推力增量增加,导致飞机耗油率增量变大,巡逻时间减少量增加,且高度每增加500 m,巡逻耗油率增量增加约0.6%,巡逻时间性能降低约0.6%。当飞行高度超过7 000 m时,发动机单位推力耗油率随高度增加,导致无坡度转弯时耗油率增量随高度变化率增大,巡逻时间减少量随高度变化率亦增加,此时高度增加500 m,巡逻耗油率增量增加约2%,巡逻时间性能将降低约1.9%。
3.3 发动机推力差量影响分析
飞机无坡度转弯过程中可通过发动机推力差动提供侧滑所需的偏航力矩,从而减小方向舵偏角。通过调整左侧发动机推力状态,可改变两侧发动机推力差值,进而改变发动机不对称推力产生的偏航力矩,从而影响飞机无坡度转弯飞行状态。为研究飞机发动机推力差值变化对无坡度转弯耗油率增量百分比的影响规律,给定飞行马赫数0.34、飞行高度6 500 m、转弯角速率0.5(°)/s,计算分析不同发动机推力差动状态下飞机无坡度转弯耗油率增量,得出发动机推力差量对无坡度转弯巡逻时间性能的影响,结果如图7所示。

图7 无坡度转弯耗油率增加百分比随推力差值变化
图7中TL表示飞机左发推力状态,TR为右发推力状态,由于假定飞机向左转弯,则TL越小,表示左右发动机推力差值越大,TL=TR时表示左右推力相等,无推力差动影响。由图7中计算结果可知,左发推力大于0.4额定推力时,飞机无坡度转弯耗油率增量百分比随发动机推力差值增大而减小,则飞机巡逻时间减小量随发动机推力差值增大而减小;左发推力小于0.4额定推力时,无坡度转弯耗油率增量百分比随发动机推力差值增加而增加,则飞机巡逻时间减少量亦随发动机推力差值增加而增大。
上述变化规律是由飞机无坡度转弯需用推力和发动机单位推力耗油率变化的共同作用产生。由图8可知,给定条件下,飞机无坡度转弯需用推力大于平飞推力;考虑发动机推力差动影响时,飞机无坡度转弯需用推力随左右发动机推力差值的减小而增加,且当推力差值为0即左右推力相等时,无坡度转弯需用推力最大。由图9可知发动机单位推力耗油率随推力状态减小而增加,且发动机推力越小,单位推力耗油率增加越快。左发推力大于0.4额定推力,即发动机推力差值较小时,飞机无坡度转弯需用推力对无坡度转弯耗油率的影响量大于发动机单位推力耗油率的影响,此时飞机需用推力为主要影响因子,故无坡度转弯耗油率增量百分比和飞机巡逻时间减少量随发动机推力差值的变化规律与飞机需用推力变化规律一致。反之,左发推力小于0.4额定推力即发动机推力差值较大时,发动机单位推力耗油率为飞机无坡度转弯耗油率增量变化的主要影响因子,此时无坡度转弯耗油率增量百分比和飞机巡逻时间减少量随左发推力减小而增加,即随左右发动机推力差值的增大而增加。
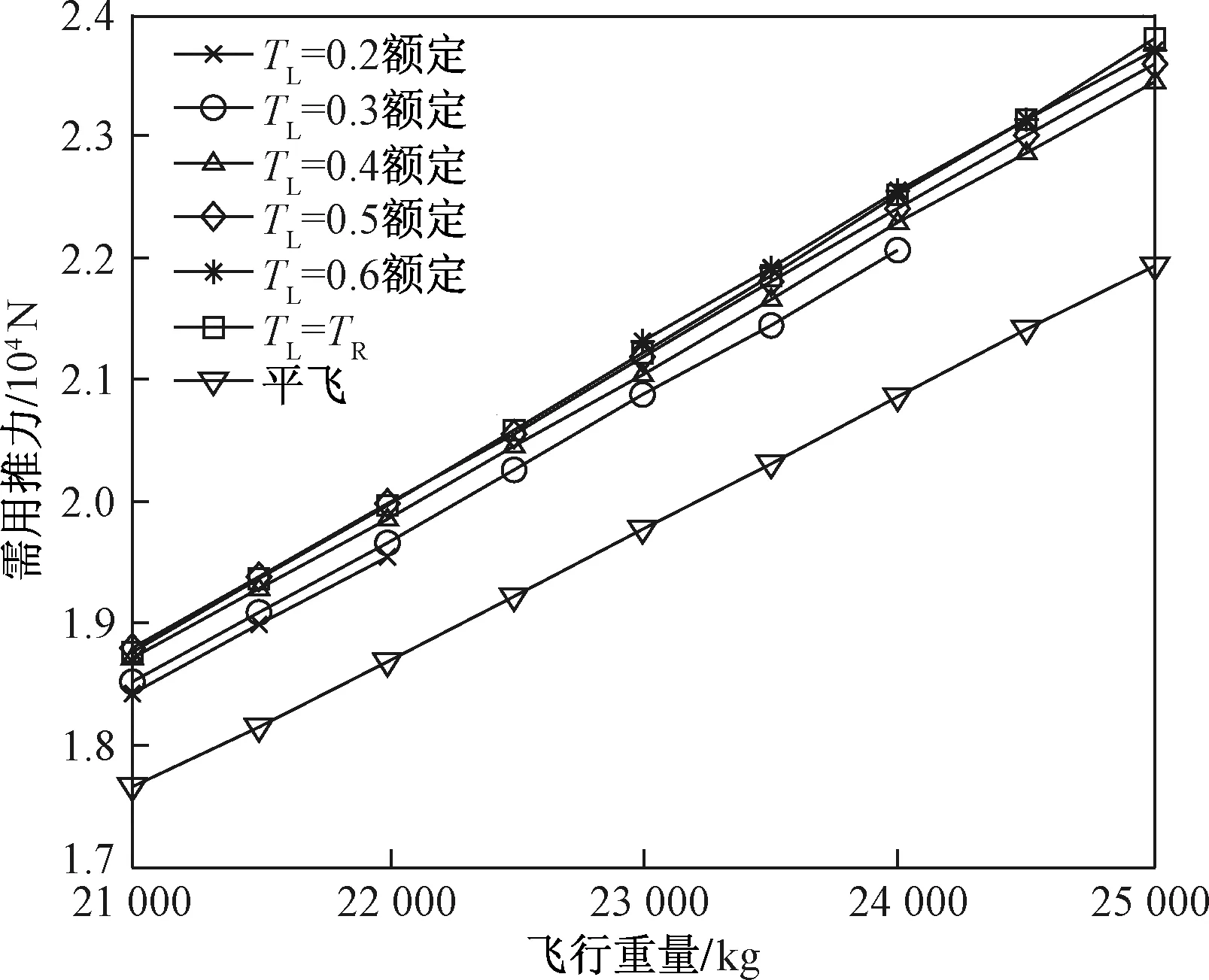
图8 无坡度转弯需用推力随发动机推力差值变化情况
4 结论
根据预警机无坡度转弯时的物理特性建立了飞机无坡度转弯动力模型,并据此开展无坡度转弯求解方法分析,得出一套适用于飞机无坡度转弯的求解流程,通过分析转弯角速率、飞行高度、左右发动机推力差值等因子对飞机无坡度转弯耗油率增量的影响得出其对飞机巡逻时间性能的影响规律。主要得到以下研究结论。
(1) 无坡度转弯引起耗油率增加,导致飞机巡逻时间减小,且随着转弯角速率、重量、高度的增加,耗油率增量百分比增大,巡逻时间性能降低。
(2)无坡度转弯耗油率增加百分比随发动机推力差值变化的变化趋势主要取决于发动机单位推力耗油率和需用推力的增加量,当推力增量为主要因子时,随发动机推力差值增加而减少,反之,则随发动机推力差值增加而增大,巡逻时间减少量与无坡度转弯耗油率增加百分比变化规律一致。
(3)本文所研究的无坡度转弯对预警机巡逻时间性能的影响,为预警机巡逻飞行任务规划中的飞行高度、转弯角速率、发动机推力差量控制等参数的选择提供依据。
