跨设备条件下手背静脉识别方法的研究
2021-05-14王一丁
王一丁 苗 霞
(北方工业大学信息学院 北京 100144)
0 引 言
“互联网+”带来的网络化时代,使人们的生活更为便捷,但因身份识别所造成的安全问题也日益严峻,如何提高身份识别技术也成为各界所关注的重点。生物特征因其与生俱来的唯一性在身份识别应用上占据显著优势,其中虹膜、人脸、指纹和静脉识别在日常生活中的应用较为普遍。个体所独有生物特征使其可以区别于他人,以生物特征作为区分个体的身份信息,进而达到身份识别的目的。
手背静脉是分布于手背皮下的静脉结构组织,基于不同组织因红外光的吸收率不同可以产生灰度差异,采用红外光对手背进行图像采集,可以突显出静脉的轮廓结构[1-2]。已有解剖学著作[3]证明手背静脉在人类生长发育过程中具有独特性和唯一性,采集过程需要保持在活体中进行,可以保证信息的安全性。所以,依据手背静脉这一生物特征对个体身份进行识别在理论和研究方面均具有重要意义,且该技术也在不断被推广应用。
目前,各种基于PCA、LBP、SIFT,以及其他改进算法,例如MB2D-LDA[4]、基于纹理特征优化算法[5]等,在单一设备的识别率已经超过99%。显然在单一设备、用户配合较高的强约束条件下,手背静脉识别准确度已有明显成效。
但在接近自然应用的状态下,往往用户的配合度较低,基于手背静脉识别也很难达到较高准确率。在跨设备、跨地域和跨姿态等弱约束条件下,不仅异类间的静脉样本存在类间变化,同类间的样本也产生较大的类内变化。样本图像的变化难以预测,且变化的状态存在冲突,使得以手背静脉这一生物特征作为身份识别依据的难度大大增加。目前在跨设备条件下进行匹配识别的研究较少,使用经典SIFT算法在跨设备条件下进行实验,其最高识别率仅为73.48%,结果表明,跨设备条件下的数据对识别效果造成较大影响。在改进型SIFT算法[6]中识别率达到90.8%,但错误识别仍然较高,有很大的提升空间。
本文选择检测边缘性能的梯度阈值分割方法[7]生成的二值图像库进行实验。针对跨设备条件下存在的问题,本文确定由二维小波分解提取关键点,并对不同方向细节特征图像组合,最后确定在垂直+对角特征组合下,在对关键点的描述上引入生物视觉特性,并对描述子的结构参数进行适当调整,应用于手背静脉识别,使关键点对应描述子有更强表述性能,在不同设备下采集的手背静脉图像库中,识别率达到93.4%。
1 跨设备手背静脉图像库
基于近红外光对手背不同组织有不同吸收率,可以采集存在灰度差异的图像,静脉血管具有特定波长(实验采用850 nm),区别于其他手背组织,因此以红外光采集的手背图像,可以完整地显示出静脉结构。图1所示为静脉图像的采集装置。
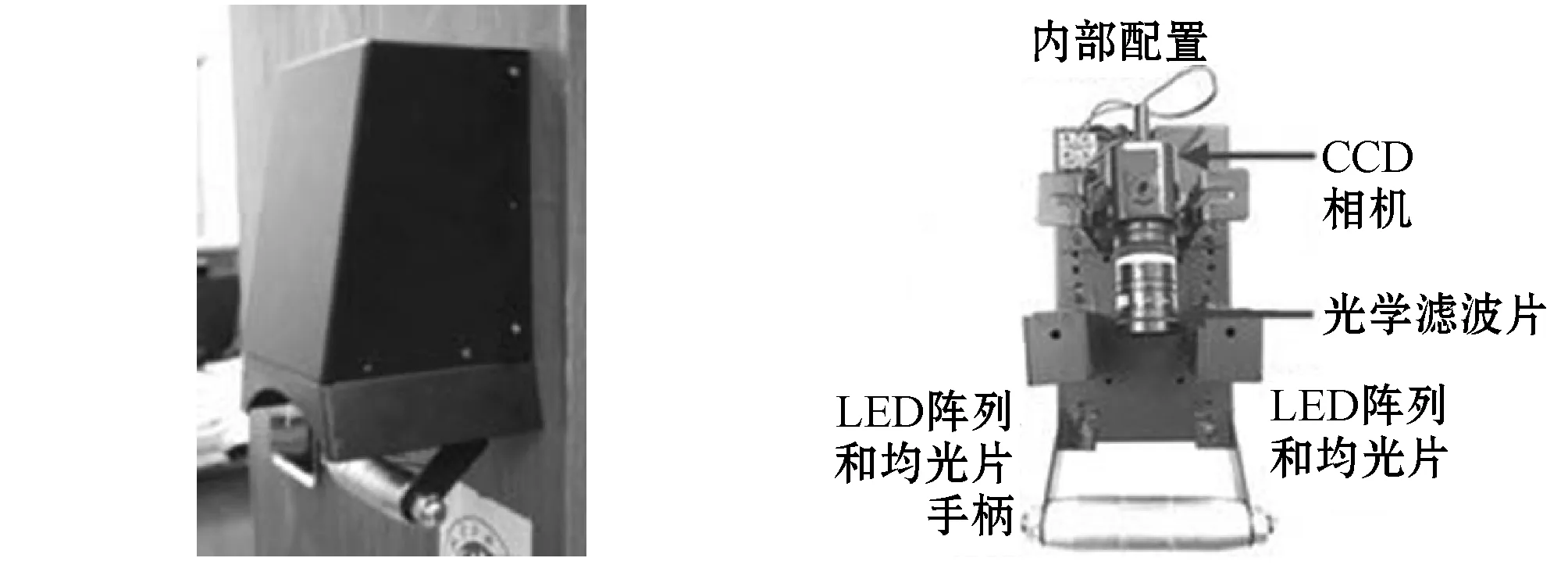
(a) 静脉采集设备外部装置(b) 静脉采集设备内部结构图1 静脉图像采集装置
由图1所示红外图像采集装置,共采集50位不同性别、年龄在20到25岁之间的手背静脉图像,采集过程不限制参与者的姿态,增加样本的随机性和多样性,每只手背采集10幅图片,两个设备共计采集1 000幅静脉图像,构成实验所用数据库。
图2为跨设备条件下采集的手背静脉部分图像。可以看出,静脉图像在位置、尺度和角度等方面均存在不同程度的差异,且背景中皮肤、手柄等噪声较多,不同设备下同类别图像也显现出较大差异,使得在跨设备条件下的手背静脉识别难度大大增加。
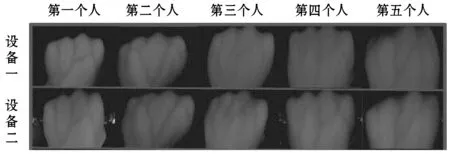
图2 跨设备手背静脉图像库的部分图像
灰度图由于背景区域与静脉的对比度不是很强烈,在识别过程中很容易因为手背其他区域的影响导致鲁棒性很差,而二值分割图的对比度最强烈,可以将静脉走向完全突显出来。通常二值分割需要选取合适的分割阈值T,即:

(1)
F(x)=1-f′(x)
(2)
式中:f(x)为采集的灰度图像;F(x)为分割后静脉显示为黑色的二值图像。
目前常见的分割方法有阈值图像法[8]、最大类间方差方法[9]、Niblack方法[10]、Sauvola方法[11]和针对手背由Wang等[12]提出的边界特性方法。梯度计算可以检测边缘轮廓,所以在分割静脉过程中采用基于检测边缘性能的梯度方法[7],可以改善静脉脉络检测效果。将图像边缘由梯度信息进行描述,以下为将梯度计算引入的分割阈值计算公式:
(3)
(4)
式中:G代表全局最大梯度(一般为255);m(x,y)为N×N局部区域内均值;g(x,y)为点f(x,y)处的梯度值;G(x,y)是以该点为中心的各邻域的最大梯度值;k(x,y)则对应自适应系数,可以通过参数α和β来确定。
k(x,y)依据局部区域对比度调整g(x,y)值,进而调整分割阈值T(x,y),抑制血管分割断裂现象发生,改善分割效果。此外,不同的梯度计算方法使得该方法在图像分割上具有良好的可扩展性。
图3为使用该方法分割后二值手背静脉图像库的部分图像。
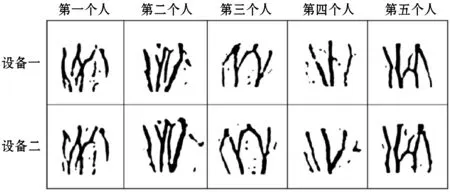
图3 二值静脉图像库部分图像
相对于灰度图像,显然二值图像去除皮肤背景的静脉结构显示较为完整,更适合用来提取图像的关键点等信息。
2 关键点提取方法
2.1 脊线提取方法
不同的类别对应不同的静脉网络拓扑结构,以脊线作为手背图像的脉络分布结构,可以对当前图像进行描述。其中基于宽度结构模型[13]的匹配算法提出将二值图像转换为距离图像,有助于图像脊线的提取。脊线提取的部分方法如下。
二值图像转换为距离图像:对于分割后的二值静脉图像,选取当前像素点作为操作中心,逐步增大圆的半径至该圆与背景相接,此时以最大内接圆半径代替当前像素值。以该方法遍历静脉区域所有像素,将二值图像转换为距离图像。距离图像表现为在静脉中心线附近的值较高,并朝着边缘方向距离值逐渐降低。
距离图像的脊线提取:由距离图像中心线对于像素值较高,所以提取中心线对应数值,将其他边缘值归为背景类。此时,当前静脉图像的拓扑结构将由提取的脊线来表征。
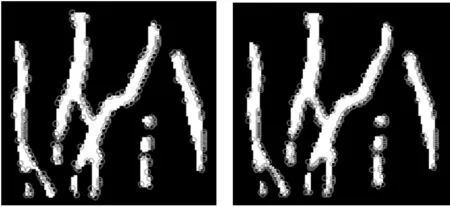
脊线提取如图4所示,其中:图4(b)为图4(a)生成的距离图像。可以看出,该图像在中心线附近较亮,对应较高像素值。图4(c)为提取的脊线在二值图像中的位置分布,其完整地显示出静脉图像的脉络走向。该方法的主要特点是关键点全部分布在静脉上,但其梯度运算后方向性较差,对存在旋转问题的图像的适应性也相对较差。
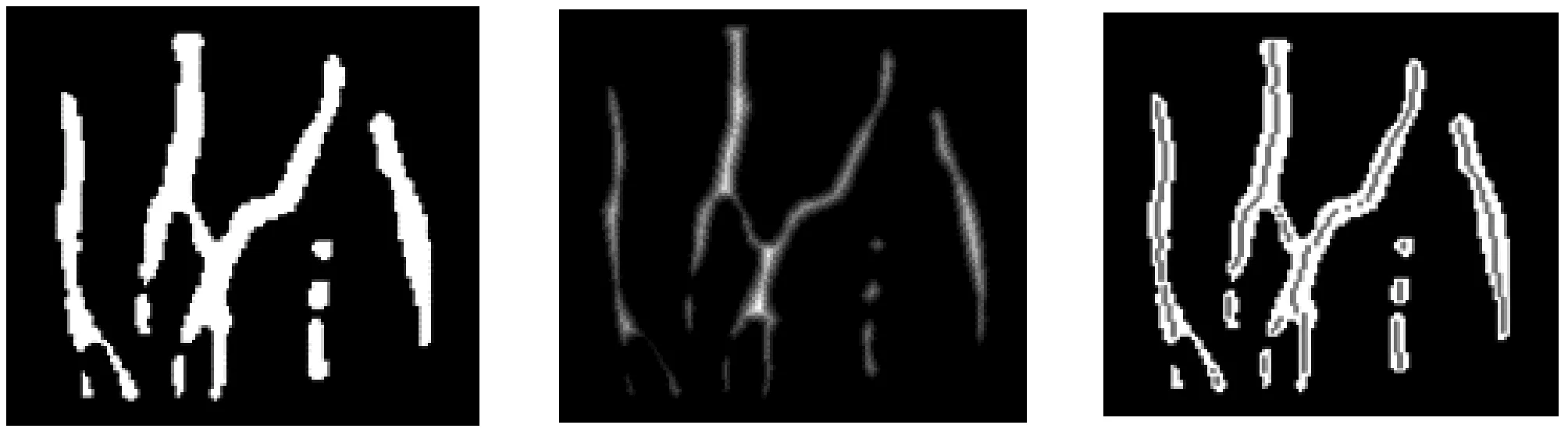
(a) 二值图像 (b) 距离图像 (c) 脊线分布图4 脊线提取
2.2 SIFT关键点提取
相较于脊线特征对图像结构拓扑进行描述,SIFT关键点检测方法作为目前常用的关键点检测方法,其在图像的局部范围内选取极值点作为图像关键点。高斯差分(DoG)为标准SIFT算法中的关键点检测算法。该方法由一组连续变换的高斯核对同一尺度的静脉图像进行卷积,然后缩小图像尺寸,进行相同的卷积操作,重复操作数次形成高斯金字塔,接着将同一尺寸相邻卷积核的卷积图像做差,得到用于确定关键点DoG金字塔。极值点的搜索模板设置为3×3×3,在邻域范围内确定极值点作为该图像的关键点。
图5所示为SIFT特征在静脉图像的分布,显然几乎所有的关键点都分布在静脉的边缘轮廓,相比于脊线特征增强了对方向性检测的敏感性,但是关键点在部分区域的分布较为稀疏,不利于对图像的描述,且大量卷积计算在特征提取过程中消耗时间较长,效率较低。
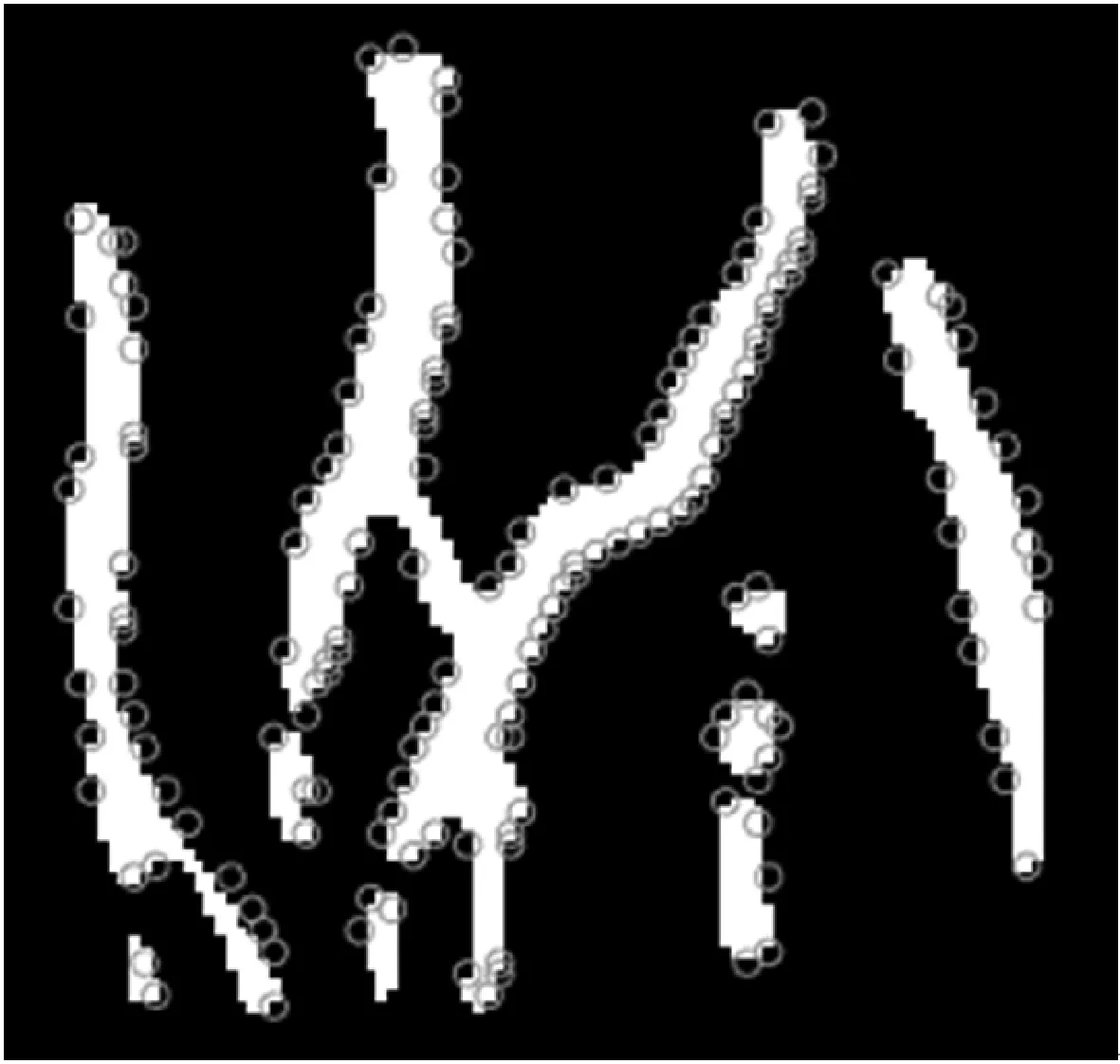
图5 SIFT关键点分布
2.3 二维小波分解关键点提取
以二维小波分解算法对手背静脉图像进行关键点提取,图像对应二维函数f(x,y),使用可分离的尺度函数φ(x,y),在具有多分辨率的矢量空间下,可将图像分为逼近图像和细节图像两部分[14]。
Sj=[〈f(x,y),φjn(x)·φjm(y)〉]m,n∈Z
(5)
式中:Sj代表不同尺度下参考的低分辨率图像。对应的细节图像分别为:
D1,j=[〈f(x,y),φjn(x)·Ψjm(y)〉]m,n∈Z
D2,j=[〈f(x,y),Ψjn(x)·φjm(y)〉]m,n∈Z
(6)
D3,j=[〈f(x,y),Ψjn(x)·Ψjm(y)〉]m,n∈Z
式中:D1j、D2j、D3j分别代表不同分辨率下不同方向的高频细节图像;j代表不同尺度。
在多分辨率的尺度空间中,静脉图像依据不同方向在不同尺度下进行小波分解,分解后的近似图像和细节图像呈现类金字塔的排列形式,如图6所示。
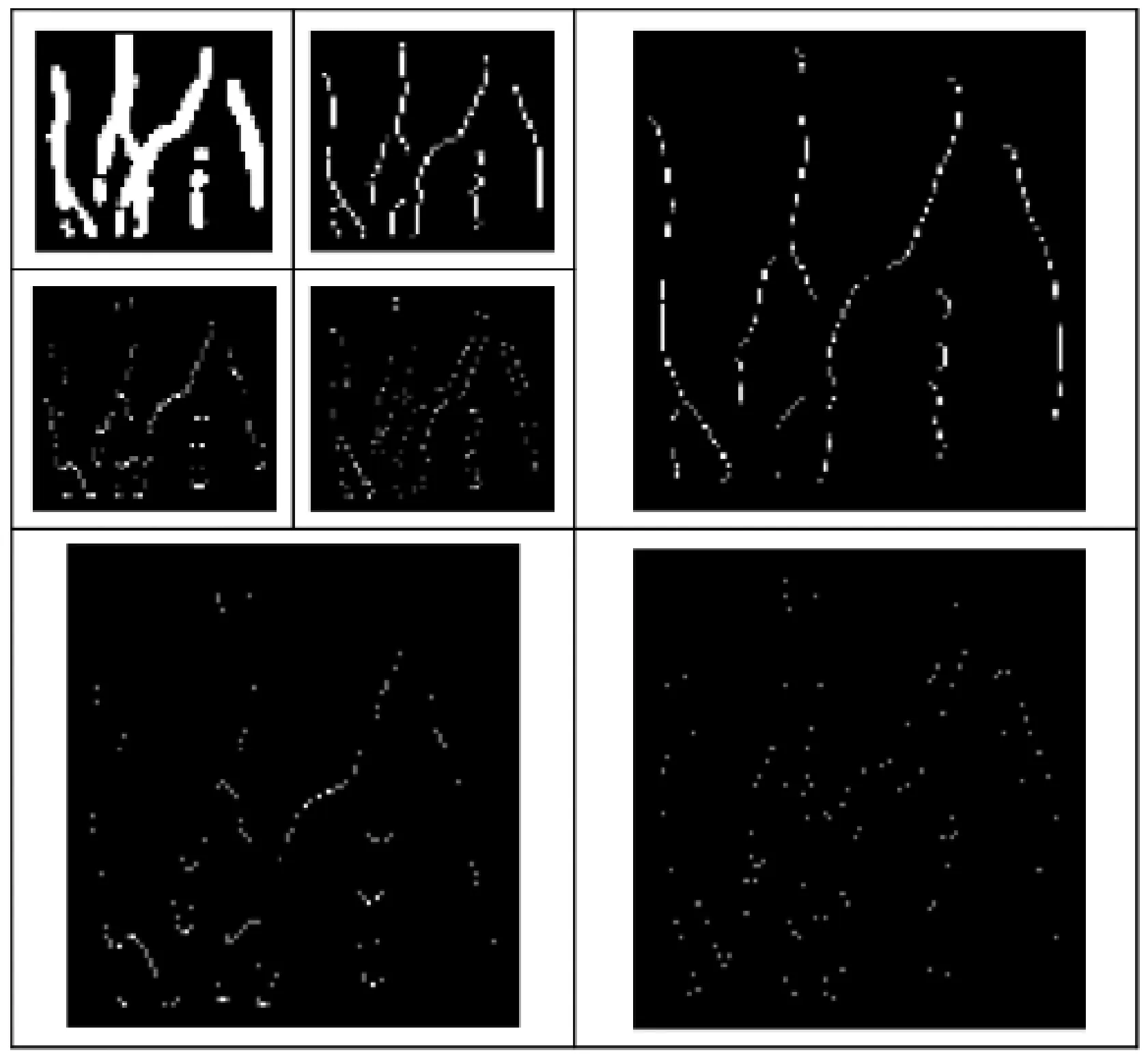
图6 静脉图像二级小波分解排列图
图6左上角图像是原图像二级近似分量(尺寸为原图1/4),该图像由于过度压缩,丢失太多原图像信息,导致细节图像较为模糊,不适合作为关键点对图像进行表述。故本文选取一级近似分量对应图像(尺寸为原图1/2)提取细节信息对图像进行描述,图6右上、左下和右下分别对应静脉图像的垂直、水平和对角分量细节图像。
实验首先选取单一方向细节分量(即三幅细节图像中任意一幅)作为该图像的关键点。图7为关键点在二值图像上的分布情况。

(a) 水平 (b) 垂直 (c) 对角图7 不同方向细节图像的关键点分布
可以看出,小波分解的关键点均分布在静脉的边缘轮廓处,水平方向和垂直方向的关键点在静脉的上边缘分布较少,垂直方向的上边缘基本没有检测到关键点,而对角方向的关键点在静脉边缘可以保持较为均匀的分布,所以实验效果较好,识别率可达91.2%,但是该细节特征的分布较为稀疏,尤其在纵向边缘的关键点分布较少,所以将考虑对不同方向上的特征进行组合以弥补单一特征的不足。多方向特征组合包括:水平+垂直、对角+垂直、水平+对角、对角+垂直四种组合方式。
图8是小波分解的多方向细节图像组合后的特征点在二值图上的分布。可以看出,水平+垂直的组合特征图并未改善上边缘特征点缺失的问题;水平+对角的组合特征图则缺少对垂直特征的检测,而手背静脉的竖直纹理分布较多,所以纵向特征的缺失将会影响实验结果;水平+垂直+对角的组合特征图将各方向的特征都融合在一起,虽然不存在特征缺失或稀疏的问题,但是在水平方向的特征点分布过于密集,进而会对局部特征重复的进行描述,而这些特征也将可能增大与其他类别的误匹配率,也会增加计算量;最后选择垂直+对角的特征图组合,垂直方向的特征可以检测静脉图像在竖直方向的纹理,而对角特征则可以提取图像倾斜和弯曲区域的特征,可以完整地对图像进行描述。
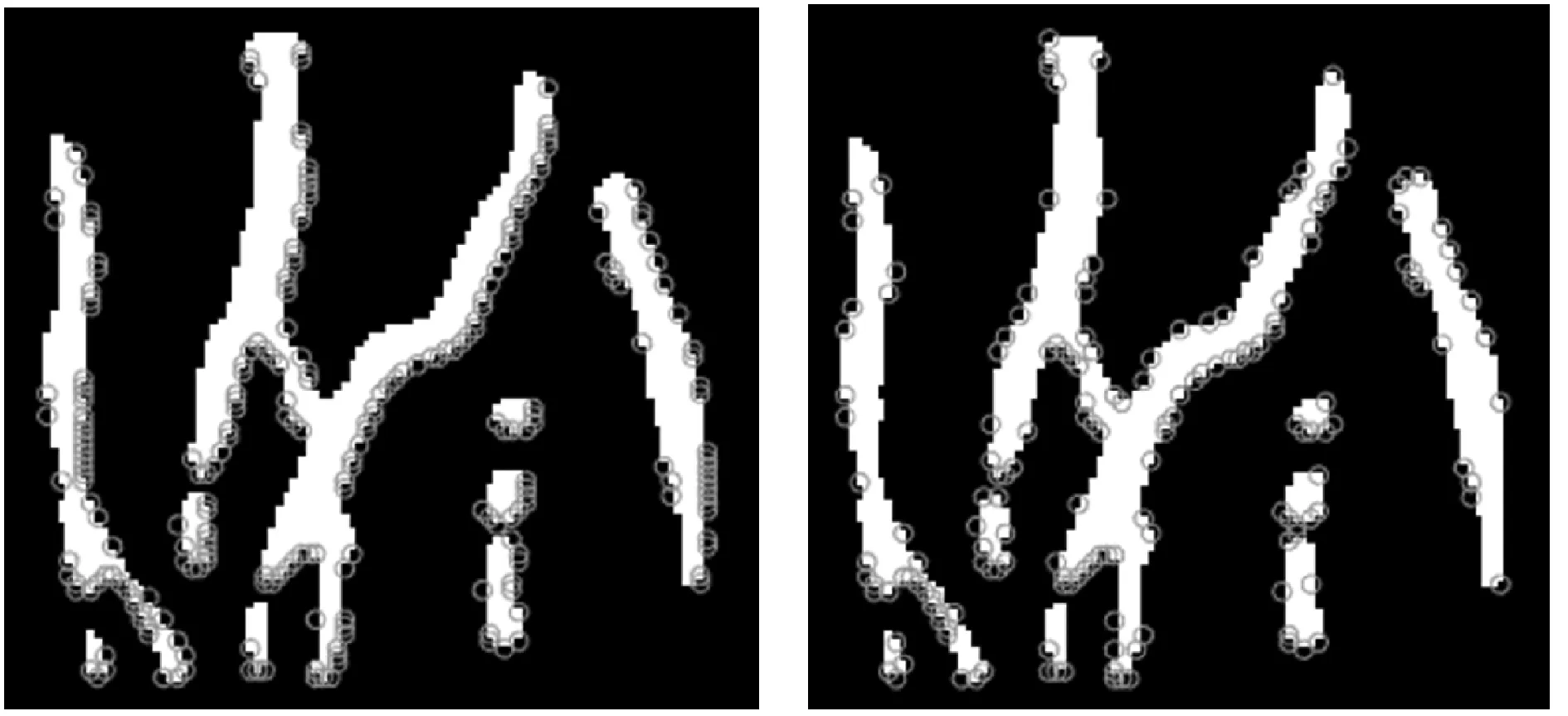
(a) 水平+垂直 (b) 水平+对角
(c) 垂直+对角 (d) 水平+垂直+对角图8 小波分解的多方向关键点组合
与SIFT特征类似,二维小波分解所得特征也是位于静脉轮廓的细节特征(高频特征),保留其对方向检测的敏感性,对抗图像旋转具有一定优势。并在垂直+对角的组合下,识别效果达到最佳,在跨设备条件下,最高识别率达93.4%。
3 鲁棒特征描述子
3.1 生物视觉感知特性
经生物学家研究发现,视神经细胞中的P型细胞以接收视觉范围内中心视野的信息,为大脑提供高分辨率信息,可用作对物体的识别。依据该细胞在视网膜上的分布特性以及其对外界刺激的响应机制,生成对图像关键点的描述子,可具有更好的描述特性。
Rodieck[15]提出了神经节细胞受外界刺激,产生神经脉冲的响应关系,DoG建模函数如下:
(7)
式中:γc和γs分别为P型细胞在中心和周围接受域的范围;Hc和Hs分别为该细胞在中心和周围的峰值灵敏度。其中H与γ成反比关系,即细胞较大的接受域范围对应峰值灵敏度较差。所以式(7)可简化为:
(8)
P型细胞除了与神经脉冲存在一定的响应关系外,在视网膜上的分布也存在一定特性。在P型细胞的分布范围内,随着细胞距视觉中心的距离增加,接受域范围γ呈指数型增长,峰值灵敏度H相应减小,对应位置细胞所提供的空间分辨率也将降低。实验证明神经节细胞的分布密度随着距视觉中心距离的增长呈指数型下降,所以对外围信息的采样率也相应地降低。图9(a)所示为P型细胞在视网膜上的分布图。图9(b)为P型细胞的近似建模分布图,依据P型细胞的分布特性,图中由中心向外以指数增长形式确定同心圆的半径,对应细胞分布密度则呈指数型下降,该分布特性符合离散小波的理论[16],可以完整地对特征进行描述。
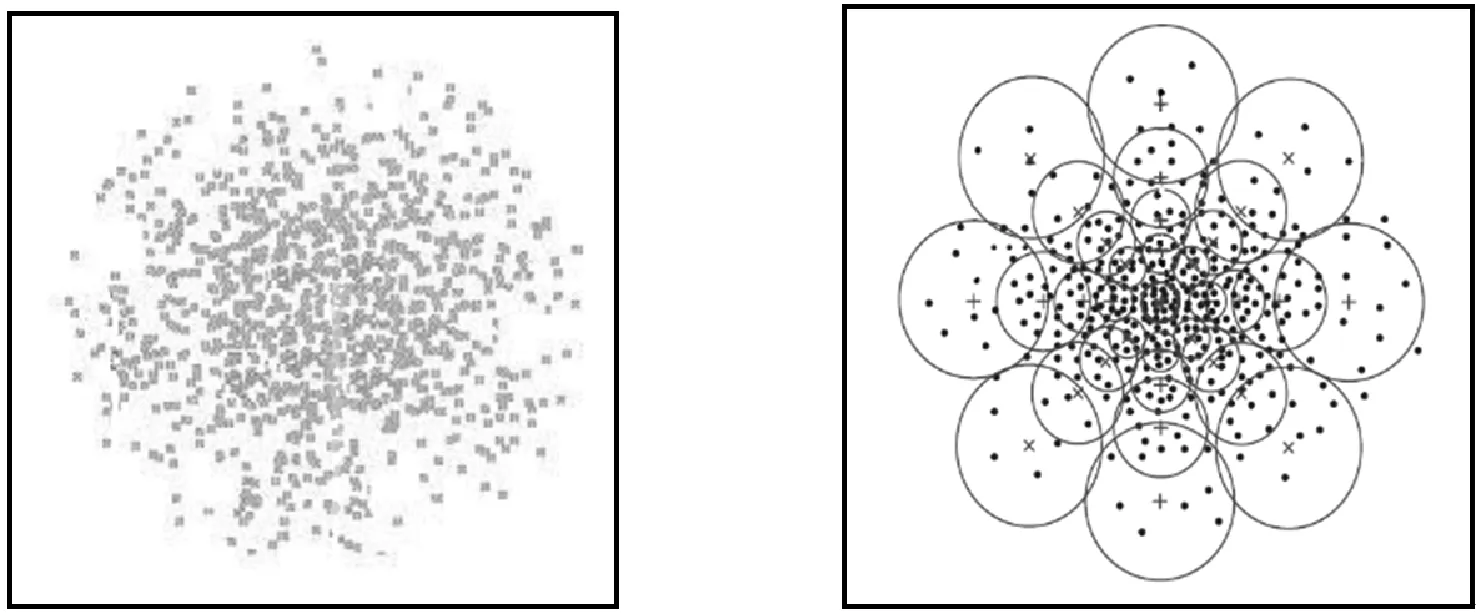
(a) P型细胞分布图 (b) P型细胞近似建模分布图图9 P型细胞
将这种生物视觉感知特性应用于对手背静脉图像所提取关键点的描述上,即依据生物视觉特性的建模方法,将关键点设置为中心点,提取其周围的同心圆的各圆心位置所对应像素对当前关键点进行描述,进而描述整幅手背静脉图像。
3.2 基于生物视觉感知的鲁棒特征描述子
依据P型细胞在视网膜中分布特性以及对外界刺激响应机制,构建的高可分性的鲁棒特征描述框架(DERF)[17]下生成描述子的部分计算过程如下:
首先,在获取一幅图像后,采用一定的算法来获取图像的局部关键点,以每个关键点为中心,截取一定大小的图像片段以便获取对该关键点的特征描述。
然后,计算该图像片段的DoG卷积梯度方向图,如图10所示。
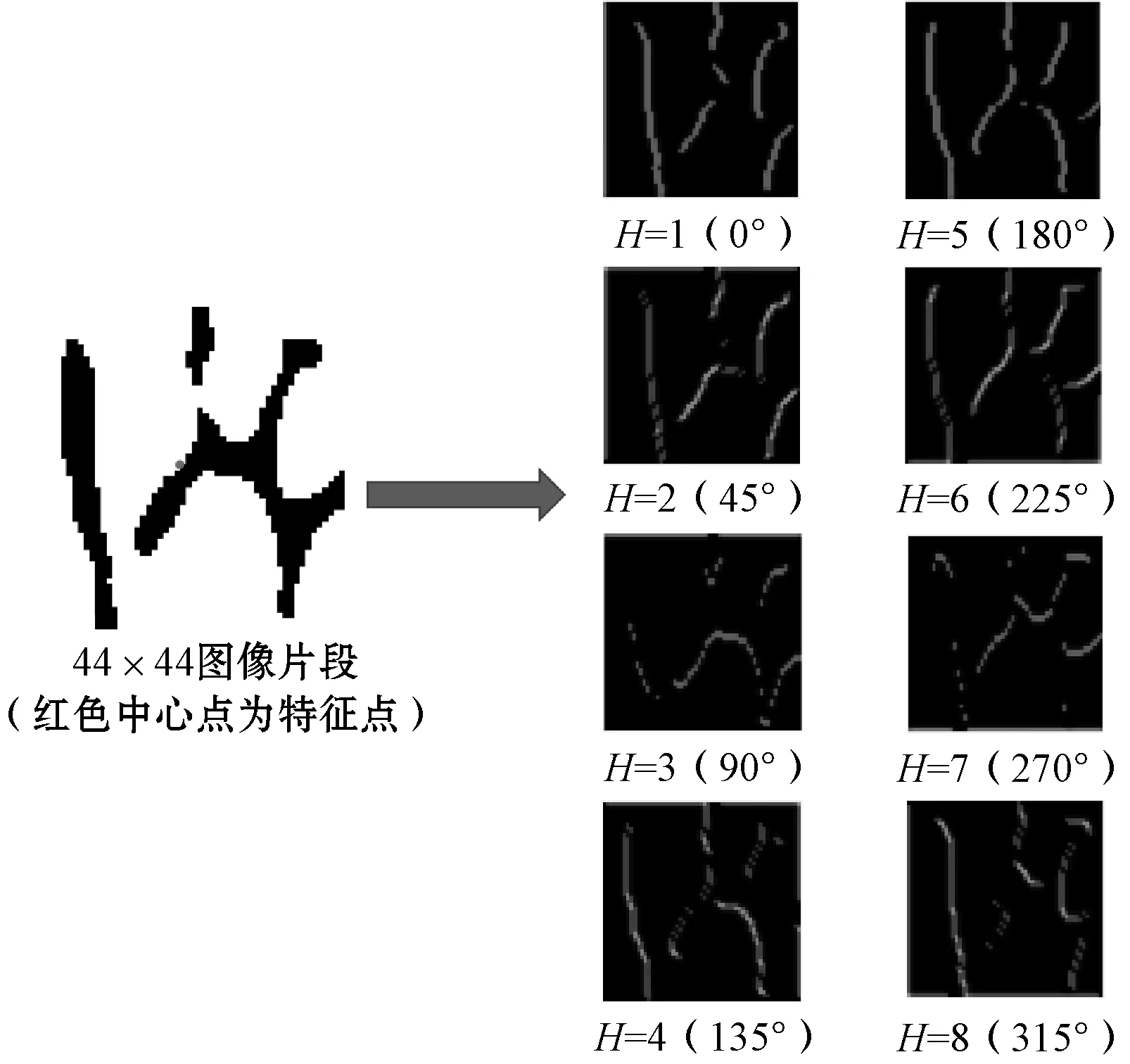
图10 关键点图像片段及方向梯度图
图像片段的方向梯度图共有H个方向,图10左半部分为以关键点为中心的44×44的图像片段,右半部分为该图像片段的8个方向的梯度图。之后,对每一幅梯度方向图使用不同大小的高斯核σ卷积S+1次。最后,将同一个方向两个相邻尺度的高斯卷积方向梯度图相减,得到DoG卷积梯度方向图。计算流程如图11所示。
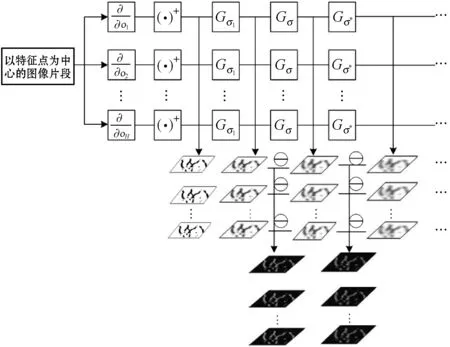
图11 DoG卷积梯度方向图计算流程

根据P型细胞的分布特性,在DoG卷积梯度方向图上采样来构造每个关键点的描述子。图12为描述子的采样模板结构图。
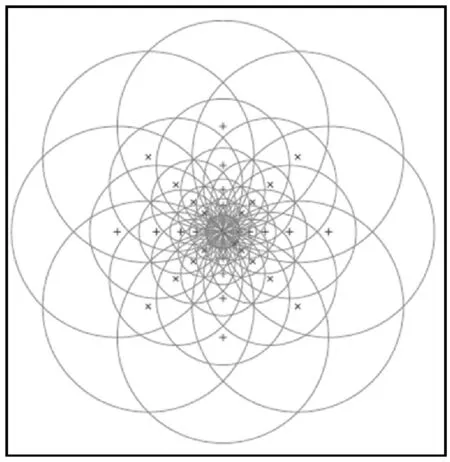
图12 描述子采样模板结构图
图12中的每个采样点所处同心圆半径以及对应的DoG卷积核由中心区域向外逐渐增大,将在DoG卷积梯度方向图上进行采样构建新的描述子。
采样点的选取规则为:位于内层同心圆的半径较小时,在对应σ比较小的一组DoG卷积方向梯度图上进行采样;半径较大时,则在对应σ较大的一组图片上进行采样。本文设置5层同心圆对应差分后5组DoG卷积方向梯度图,同心圆的中心点与最小半径的同心圆选择一致。
在尺度σ下,(α0,β0)位置在DoG卷积梯度方向图中对应特征向量为:
(9)
所以,关键点(ξ0,υ0)在不同半径、不同尺度下对应的全部描述子可以表示为:
Κ(ξ0,υ0)=
[hσ1(ξ0,υ0),hσ1(l1(ξ0,υ0,r1)),hσ1(l2(ξ0,υ0,r1)),…,hσ1(lT(ξ0,υ0,r1)),
hσ2(l1(ξ0,υ0,r2)),hσ2(l2(ξ0,υ0,r2)),…,hσ2(lT(ξ0,υ0,r2)),⋮hσS(l1(ξ0,υ0,rS)),hσS(l2(ξ0,υ0,rS)),…,hσS(lT(ξ0,υ0,rS))]T
(10)
式中:li(ξ0,υ0,rj)表示以关键点(ξ0,υ0)为中心,半径为rj的同心圆上在第i方向对应采样点的特征向量。
图13为描述子的特征向量图示,以关键点为中心,均匀地在每层同心圆上采样8次,5层同心圆包含中心点,共计采样41次。图中每个采样点的箭头方向分别对应8个梯度方向图,即每个采样点对应维度为8的特征向量,因而该关键点由8×(5×8+1)=328维特征向量进行描述。相比于经典SIFT描述子以8×16=128维向量对关键点进行描述,如图13(a)所示,本文所述描述子将传统的在一幅图像局部统计8个梯度方向,改为在8幅梯度方向图对应位置同时提取像素点,而且基于生物的视觉特性,增加了描述子特征向量的维度,显然该描述子能更详尽地对手背静脉特征进行描述。

(a) 传统SIFT描述子 (b) DERF描述子图13 特征向量示意图
基于生物视觉特征的描述子,本文将考察其同心圆的不同参数对特征描述子在图像片段上分布的影响。实验设置相邻同心圆之间的半径比值为22/3,由于每层同心圆分布的不同采样点对应高斯标准差相同,而且与该同心圆的半径相关,所以两个相邻的高斯标准差的比值也为22/3,即为同心圆半径的0.25倍。
由于图像片段大小受最外层同心圆半径影响,限制了同心圆最大层数,且层数太低实验结果较差,改变同心圆层数对描述子数量也具有较大影响,所以综合各种因素选定同心圆的层数为5。本文将主要验证同心圆初始半径r0对描述子分布以及最终识别率的影响。
4 实 验
4.1 手背静脉鲁棒特征提取
本文将二维小波分解关键点提取算法与鲁棒特征描述子结合,用于跨设备手背静脉识别中,图14为具体的识别流程。以1号设备为训练集,2号设备为测试集,首先对静脉图像做小波变换,提取细节静脉的图像,然后选取垂直+对角的组合作为图像的特征点;以每个关键点为中心,在大小为120×160的原图像上截取周围44×44的图像片段;构建每个图像片段的DoG梯度方向图,最后采用图12所示的结构在梯度方向图中进行采样,得到每个关键点的描述子。
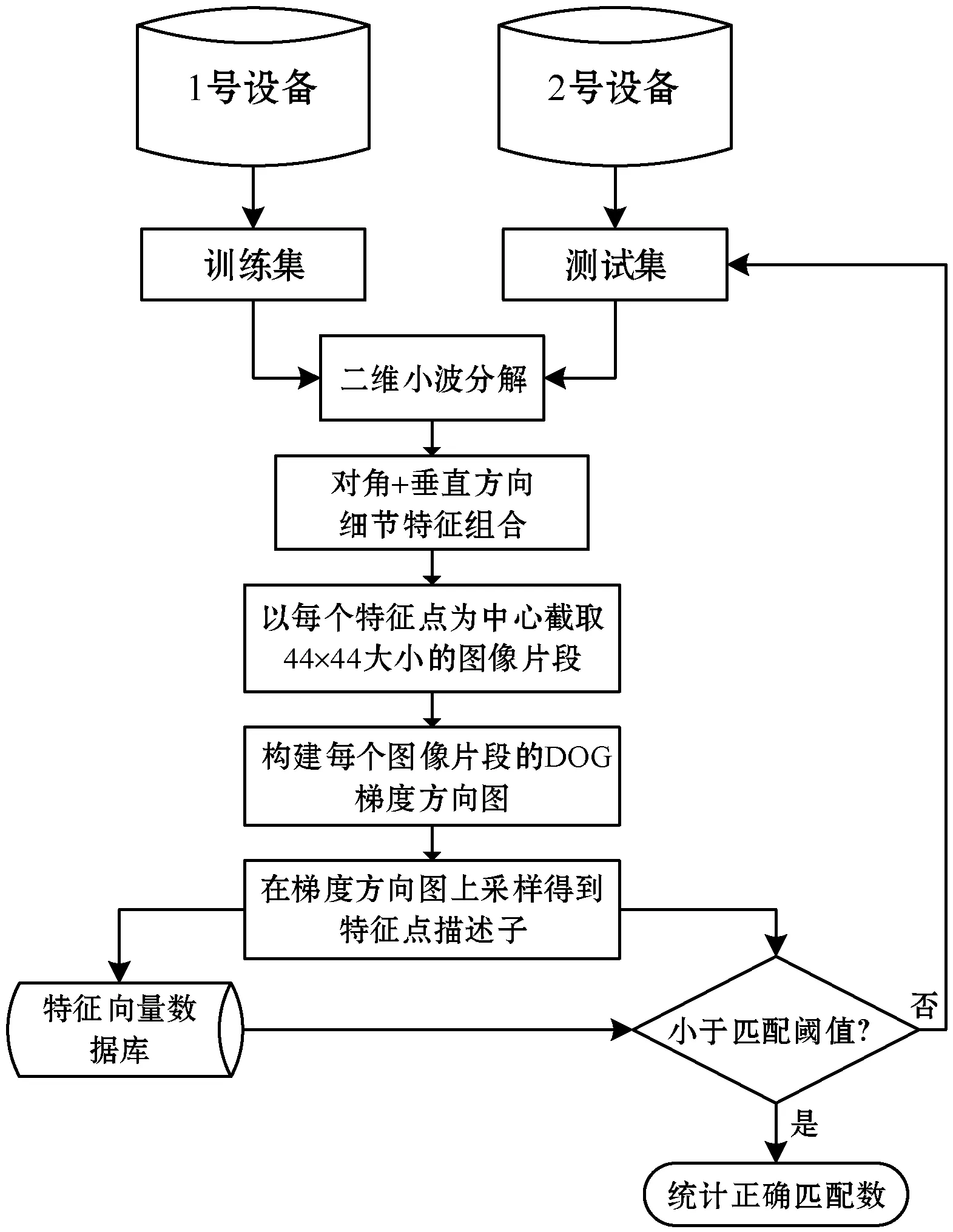
图14 跨设备条件下手背静脉识别流程图
4.2 实验结果分析
基于生物视觉特性的描述子,实验过程中选取能使描述子最紧的参数,即DoG梯度方向图中,选取8方向的梯度图,计算梯度采用的是DAISY算法[18],实验设置最初的初始半径r0为5。实验首先基于SIFT算法,将特征描述子更换为DERF描述子,对比实验结果如表1所示。
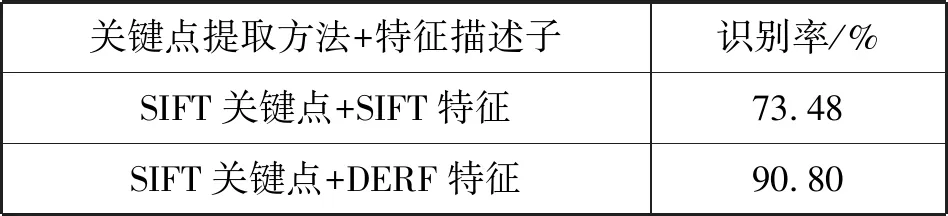
表1 不同描述子对比结果
可以看出,DERF特征描述子对跨设备条件下手背静脉识别中更具优势。所以选取基于生物视觉的DERF描述子对关键点进行描述,然后实验验证不同关键点提取方法在跨设备条件下对手背静脉的识别效果,实验结果如表2所示。

表2 不同关键点提取算法对比结果
实验结果显示,二维小波分解在对角方向的细节图像特征达到的识别率最高,说明小波分解的关键点提取方法更适合于手背静脉的识别。但其提升幅度很小,仅有0.4个百分点,所以提出将小波分解后不同方向的细节分量进行组合,以弥补单一特征的不足。不同方向特征图在不同组合下的实验结果如表3所示。
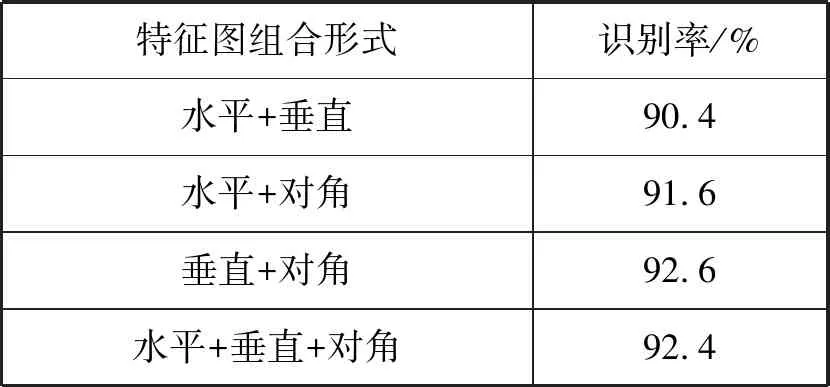
表3 特征图不同组合对比结果
可以看出,特征图在组合形式下进一步提升了识别率,证明了不同方向特征图组合的有效性,其中垂直+对角和水平+垂直+对角的细节特征图组合下,识别率相差较小,但是后者的计算量增加较大,所以本文选择垂直+对角的特征组合进行实验。
确定了关键点的提取方式,实验进一步考察同心圆初始半径r0对描述子有效性的影响。对不同同心圆初始半径r0在1-2库中的静脉图像进行实验,算法统计得到两库之间同心圆初始半径与识别率关系如图15所示。
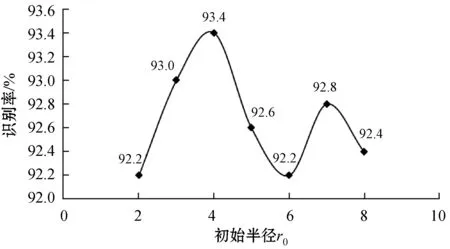
图15 同心圆初始半径与识别率关系图
可以看出,手背静脉识别率受同心圆初始半径影响,半径选为4时,在跨设备条件下手背静脉的识别率可以达到93.4%。
为了证明本文方法可以有效提高跨设备条件下手背静脉的识别率,采用了四种算法进行比较,即PCA、LBP、SIFT和改进SIFT关键点的提取算法。将两个不同设备下采集的手背静脉图像集,分别作为测试集和训练集,每种算法分别进行对比实验,结果如表4所示。

表4 不同算法手背静脉识别对比结果
对比结果显示,本文在鲁棒特征描述子与二维小波分解在垂直+对角的细节特征组合下使得跨设备条件下的识别率有了进一步的提高,可达到93.4%,证明本文方法有良好的可行性和有效性。
5 结 语
在分割后形成的二值手背静脉图像库中进行实验,本文通过对比不同的关键点提取方法,最终确定以二维小波分解算法进行关键点提取,并确定垂直+对角的细节分量为关键点的最优组合。垂直+对角的特征图组合不仅可以检测到静脉图像在竖直方向的纹理,而且也可以提取图像倾斜和弯曲区域的特征。依据视神经细胞中P型细胞在视网膜上的分布特性以及其对外界刺激的响应机制,形成了基于生物视觉特性的关键点描述算法,本文对该算法的结构参数进行调整,形成更适用于手背静脉图像的具有高可分性和鲁棒性的特征描述子。在由不同设备采集的手背静脉图像库中,该方法识别率达到93.4%,表明其具有较高可行性。
