基于毫米波雷达与光学图像的周界监控技术研究
2021-05-12龚小姣
龚小姣
(重庆军工产业集团有限公司 重庆 401120)
1 引言
雷达发展至今,已经有100多年的历史,现代的雷达与光学图像相结合,一般应用于民用、国防领域等。周界监控技术以及入侵环境检测要求雷达具备快速、准确的识别特点,在监控范围内快速查找到目标定位,并优化信号处理算法、设备运算速度等。而周界监控技术大多使用毫米波雷达,与光学影响相结合,为车辆检测、安全检测提供技术支撑,目前关于周界监控技术的研究较少,本文通过相关的经验分析周界监控技术的具体技术,并且对毫米波雷达以及光学图像进行研究[1]。
2 毫米波雷达与光学图像工作原理
周界监控技术中的入侵检测雷达,工作机制主要分为脉冲多普勒机制、调频连续波机制。雷达的工作建立在其波形、测速、测距原理上,并且其波形设计在检测中发挥重要作用,本文主要针对这两种机制,结合雷达信号,分析测速、测距的工作原理[2]。
2.1 脉冲多普勒机制
脉冲多普勒机制通过捕捉目标,并且将目标的距离、速度等进行分割分离,其工作大多基于运动中目标检测的雷达。其采用的工作方式为收发分时,即为利用接受时间的不同,完成多个目标、多个距离的分辨。在此过程中,由于不同运动目标的多普勒频率不一样,因此可轻易提取入侵目标的距离、速度等信息,并且可以多个目标同时提取。
2.2 调频连续波机制
与脉冲信号不同的是,连续波雷达的机制更适合大范围的布置安装,这是由于其结构简单、重量与体积较小的缘故,因此在周界监控入侵领域检测中,相比于脉冲雷达机制优势更为明显。而调频连续波雷达常常使用频率或者相位调制信号来获得更多的信号带宽,实现大压缩比,可增加传输功率。
本文中的周界监控技术中的入侵检测雷达,实际上大多用于商场、工厂、监狱以及机场等大型周边环境的目标监控,可以对人、车辆等进行检测,并对非法入侵的人或者车辆进行报警,因此在使用时会设置警戒范围。但是由于周边环境会有不用程度的杂波干扰,主要来源于树木、围墙、建筑物等,上述杂波会对目标检测造成影响。为了避免检测出现纰漏,大多检测使用检测动目标的形式。一般情况下,入侵动目标的杂波会较大,可以利用波形速度区分入侵目标,但是如果目标速度较慢,或者停止运动时,检测会受到影响,因此需要入侵检测雷达具备识别缓慢动目标的能力。而大多入侵不只是单一目标,因此入侵雷达还需要具备多目标检测功能,更要在杂波背景下识别出目标的距离、速度,因此周界监控技术大多使用上文的机制,既符合要求又降低了成本。
3 周界监控技术入侵检测研究
3.1 警戒区检测
在某些无人监控的区域且是重要场所附近,可以提示来往人员或者车辆,此地区为警戒地区,雷达在附近检测到目标入侵警戒区,在捕捉到目标之后,将会报警并提醒相关人员,图1为目标进入警戒区域后警告的示意图。
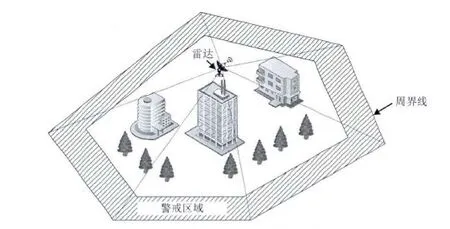
图1 警告示意
可以看出根据警戒区的位置,以雷达朝向区域为周界线,通过捕捉距离以及监视角度发现是否有人入侵,如图2所示,如果目标在警戒区域,雷达将会捕捉运动目标的运动轨迹,并且向中控台发出报警信息,如果目标没有在警戒区域,则为安全,且识别为无入侵情况。
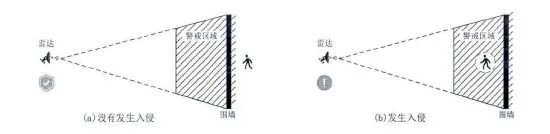
图2 未发生入侵与发生入侵时警戒区检测示意
3.2 目标运动方向预测
对于上文中提出的穿越了周界线的目标,就需要对其进行跟踪,在分析中预测目标的运动方向以及即将到达的位置。此时雷达跟踪系统以及光学图像是展示目标运动的主要手段,跟踪系统实际上使用雷达数据处理,并且在对目标进行检测之后,对雷达的测量数据,进行一系列的关联、预测等操作,借此保证对目标距离的跟踪。跟踪的参数主要从径向距离、速度、加速度以及方位向等出发,分析运动目标的实际运动参数,此时跟踪的优势主要在于可减少测量中出现的随机误差,并预知目标未来时刻的位置以及相关运动方向。
4 结语
本文主要简单介绍了毫米波雷达与光学图像的工作原理,并且对周界监控技术在实际运用中做出分析,验证得出针对不规则的周界场景,可以采用周界线标定方法,以简单的方式标定周界线,方便监控技术的实施。不仅如此,在划分警戒区域时,提出了判断入侵,以及入侵之后的目标运动方向预测,检验了目标检测以及跟踪算法的有效性[3]。实际上,周界监控技术依旧有较多内容需要研究,更需要在实践中不断完善,借此保障社会环境的稳定、和谐。
