变预瞄距离的智能车路径跟踪控制
2021-05-12蒋军锡石沛林周龙辉张亮
蒋军锡,石沛林,周龙辉,张亮
(山东理工大学 交通与车辆工程学院, 山东 淄博 255049)
近年来,汽车保有量的急速增长带来了交通拥堵、交通事故频发等问题。智能车和无人驾驶技术因能有效避免由于驾驶员的疲劳和操作不当引发的交通事故而成为研究的热点[1]。
智能车的功能是在各种环境和工况下根据传感器信息和导航信息等进行路径规划和路径跟踪控制,实现无人驾驶。智能车路径跟踪控制作为智能车自动驾驶的关键技术之一,它的研究与应用在减轻人类驾驶员劳动负担、提高行车安全性方面有着重要意义。
目前路径跟踪控制方法的研究中,大部分控制方法源于预瞄理论或者模型预测理论[2]。Liu等[3]提出了一种具有层次结构的自适应路径跟踪控制器,并基于迭代学习理论设计方向误差补偿控制器补偿前转向角;结果表明,该控制系统可以提高侧倾稳定性,保证较高的跟踪精度。姚俊琴[4]利用前馈控制方法对一般的环形预瞄方法进行了改进,改进后的算法路径跟踪准确度更高;此外,还对车辆行驶车速进行分层控制,实现了平稳加减速。邹凯等[5]提出了一种增量线性时变模型预测控制的轨迹跟踪方法,该方法在轮胎力处在非线性区域的情况下可以准确跟踪目标路径并且显著提高计算实时性。
在基于预瞄理论的路径跟踪过程中,预瞄距离是个十分关键的参数。在无人驾驶领域中,部分研究将预瞄距离设为固定值,这会使路径跟踪控制系统难以适应车速的变化而使路径跟踪效果变差[6]。基于此,本文通过分析车辆与目标道路的相对位置计算出路径跟踪偏差,采用模糊控制理论设计路径跟踪控制器,将预瞄距离设计成车速的函数,使其可随车速变化,并在CarSim-Simulink联合仿真平台上与固定预瞄距离的控制器进行对比仿真,以验证该控制器对目标路径跟踪的有效性和对不同车速的适应性。
1 车辆及道路预瞄模型
1.1 车辆运动学模型
车辆在良好的路面条件下行驶时,转向过程中对垂向影响较小,假设智能汽车只做平面运动,车辆的运动学模型如图1所示。在惯性坐标系XOY下,设定自动驾驶汽车后轴中心坐标为(Xr,Yr),φ为车体的航向角,δf为前轮转角,Vr为后轴中心速度。车辆运动学模型为
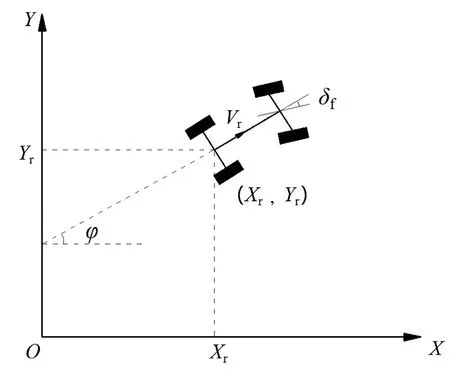
图1 车辆运动学模型Fig.1 Vehicle kinematics model

(1)
式中L为车辆前后轴距。
由式(1)可知,车辆的位置和方向角可由后轴中心速度和前轮转角确定,在已知后轴中心速度的情况下,可通过控制前轮转角来控制车辆轨迹。
1.2 车辆-道路相对位置预瞄模型
为了使车辆沿着预定好的目标路径行驶,预瞄式路径跟踪模仿人类驾驶员的行为,瞄着前方一段距离处目标路径上的一点,根据这个点处的道路情况来控制车辆逐渐贴近目标路径,预瞄模型如图2所示。设车辆预瞄前方道路的点A在惯性坐标系下的坐标为(Xf,Yf),点A处参考路径曲线的切线方向与X轴夹角为φf,车辆的质心位置为(Xc,Yc),纵轴线与X轴夹角为φc。

图2 车辆-道路相对位置关系Fig.2 Vehicle-road relative position relationship
在车辆坐标系xoy下,点A与车辆质心的位置偏差和方向偏差表示为(xe,ye,φe),根据相对位置的几何关系有
(2)
式中:xe为预瞄距离;ye为车辆坐标系xoy下车辆质心与预瞄点A的横向距离偏差;φe为车辆坐标系xoy下车辆质心与预瞄点A的方向偏差。
预瞄距离的大小影响着跟踪效果。车辆在行驶时,车速时常发生变化,当车辆以较低的车速行驶时,需要把预瞄距离设定成较小值以获得较高的跟踪精度;当车辆行驶速度较高时,需要把预瞄距离设定为较大值以提高车辆的行驶稳定性[7]。预瞄距离与车速存在一定数量关系,它与智能车的制动距离和车辆遇到异常情况进行反应的行驶距离有关[8]。由此,可将预瞄距离设定为车速的二次函数的形式,即
xe=λAv2+Bv+C,
(3)
式中:v为智能车行驶速度(m/s);λ、A、B、C为常数项。
式(3)第一项中常数A与速度v的平方的乘积表示车辆的制动距离,λ为经验系数,λ取0.1。A可表示为
A=1/(2amax),
(4)
式中amax为智能车在非紧急制动情况下的最大制动减速度,这里设amax为5 m/s2。
式(3)第二项为常数B与行驶车速v的乘积,表示车辆遇到异常情况进行反应的车辆行驶距离,B等于车辆的计算周期T,为0.1 s。C表示初始预瞄距离,取1.5 m。
因此,预瞄距离计算式可表示为
xe=0.01v2+0.1v+1.5。
(5)
2 模糊控制器的设计
2.1 输入和输出变量的隶属度函数
模糊控制具有鲁棒性强、不依赖精确数学模型等优势,常被用于解决难以精确求解的复杂非线性系统控制问题,适用于车辆运动控制系统。
描述路径跟踪控制器控制精度的指标主要有横向跟踪误差ye和方向误差φe,分别将ye和φe作为模糊控制的两个输入,输出为前轮转角δf。将输入变量ye和φe的基本论域均设定为[-1 m,1 m]、[-30°,30°],输出变量δf的基本论域设定为[-32°,32°],输入变量和输出变量的模糊论域均设置为[-3,3],它们包括了7个整数的离散集合{-3 -2 -1 0 1 2 3},并将输入量和输出量转化到各自的集合范围中。输出模糊子集的语言变量定义为:{NB(负大)、NM(负中)、NS(负小)、ZE(零)、PS(正小)、PM(正中)、PB(正大)},输入模糊子集语言变量定义为{NB、NS、ZE、PS、PB},输入与输出的模糊子集隶属度函数如图3和图4所示。

图3 ye与φe的隶属度函数Fig.3 Membership function of ye and φe

图4 δf的隶属度函数Fig.4 Membership function of δf
隶属度函数曲线形状直接影响着控制性能的好坏。函数形状尖,控制器反应灵敏;函数形状宽大,控制器表现平稳[9]。对图3所示输入量的模糊子集隶属度函数,当输入的横向距离偏差和方向偏差较大时,若输出较大的前轮转角,在车速较高和路面附着条件差的工况下容易导致车辆失稳,所以这里采用梯形隶属度函数以获得较好的稳定性;当输入变量数值大小在合理范围内时,采用三角形隶属度函数,适当提高前轮转角调节的灵敏性。为了获得更灵敏的反应,本文设计的输出模糊子集隶属度函数采用了如图4所示的三角形且形状较尖。
2.2 模糊规则库的建立及解模糊化
模糊规则在模糊控制器运行时起着至关重要的作用,它的制定是否合理直接关系着控制效果的好坏[10],通常根据驾驶员驾驶汽车的经验进行模糊规则的设置[11]。本文共建立25条模糊控制规则,每条模糊规则选用“if-then”模糊语句,即
Ri: ifyeisCjandφeisCkthenδfisUjk.
Ri代表第i条控制规则,Cj、Ck、Ujk是相应的模糊语言值(i=1,2,…,25;j,k=1,2,…,5),控制策略的确定要不断地根据仿真试验结果进行调整。本文采用Mamdani法设计控制器,采用重心法对控制器输出的模糊量解模糊化。对于离散的论域,公式为
(6)
式中:zi表示输出变量在论域中的数值;μi为zi的隶属度函数取值;z表示输出解模糊化后的精确数值。本文制定的模糊规则见表1,模糊控制曲面如图5所示。

表1 控制器模糊规则Tab.1 Controller fuzzy rules

图5 模糊控制曲面Fig.5 Fuzzy control surface
3 仿真分析
3.1 车辆模型参数和目标路径
为了验证控制器的有效性,根据前述的预瞄模型和控制器设计方法,本文在CarSim和MATLAB/Simulink平台上进行了联合仿真。在CarSim中建立的车辆模型参数见表2。
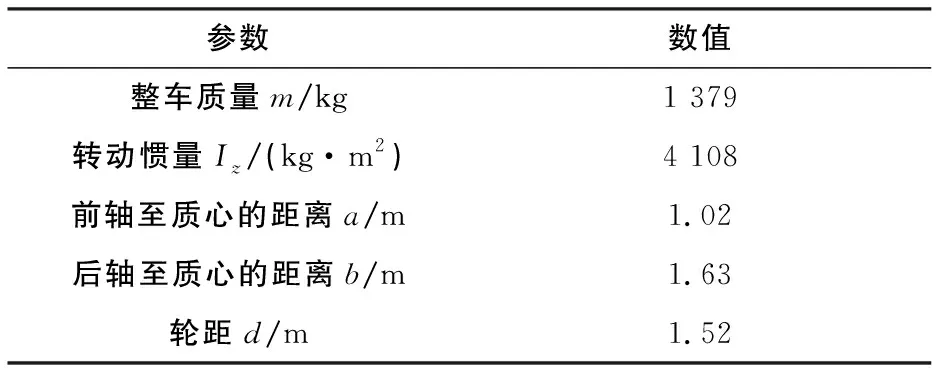
表2 车辆模型参数Tab.2 Vehicle model parameters
双移线道路是车辆行驶稳定性测试中一种常用的测试道路。本文选取双移线作为目标路径,该目标路径如图6所示,X轴表示横向位移,Y轴表示纵向位移。具体算式为
(7)
式中:h1、h2、dy1、dy2为路径表达式的参数,h1=0.096(X-27.19)-1.2,h2=0.109(X-56.46)-1.2,dy1=4.05,dy2=5.7。

图6 双移线路径Fig.6 Double lane change path
3.2 仿真结果分析
在跟踪目标路径的过程中,设定路面的附着系数为0.8。为了验证变预瞄距离控制策略的跟踪效果,将本文提出的变预瞄距离的控制策略与预瞄距离设定为某一定值的控制策略进行对比仿真。设控制器B取固定预瞄距离x0=3.3 m,控制器A按式(5)确定预瞄距离,然后在双移线路径道路下车速为18 k m/h、36 km/h、54 km/h时进行仿真。在路径跟踪过程中,车辆在车速为18 km/h、36 km/h、54 km/h时惯性坐标系下的实际行驶轨迹和横向偏差yd分别如图7、图8和图9所示。
(a)实际轨迹仿真曲线
图7表示车速为18 km/h时车辆的行驶轨迹和横向偏差,由式(3)的预瞄距离确定方案可知,此时控制器A的预瞄距离取值为2.25 m,控制器B固定预瞄距离为3.3 m。从图7可以看出,采用两种控制器的车辆都可以顺利完成对目标路径的跟踪,但是它们都在路径行程的55 m和90 m大曲率处附近产生了较大的横向跟踪偏差。其中,控制器B更为严重,在55 m路段附近横向偏差的绝对值达到峰值0.2 m;而控制器A整段路程的最大横向偏差的绝对值为0.13 m,比控制器B低35%。这是由于控制器A的预瞄距离确定方案使获得的预瞄距离较短,所以获得了较高的跟踪精度。
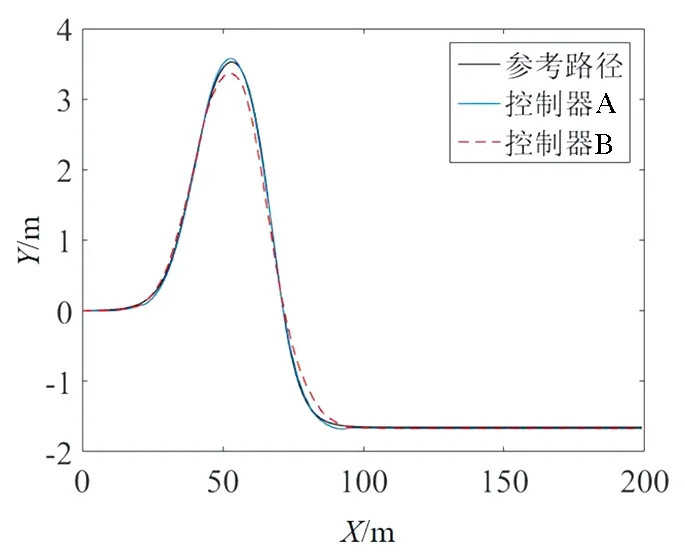
图8表示车速为36 km/h时车辆的行驶轨迹和横向偏差。由式(5)确定的控制器A的预瞄距离3.5 m与控制器B的固定预瞄距离3.3 m大小相近,所以两种控制器的实际跟踪轨迹很贴近,最大横向偏差均在0.13 m以内。

(a)实际轨迹仿真曲线
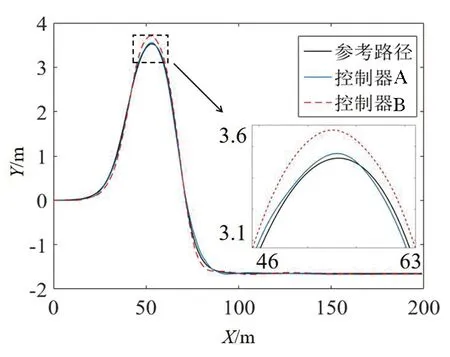
图9表示车速为54 km/h时车辆的行驶轨迹和横向偏差。控制器A的预瞄距离调节为5.25 m,两种控制器同样都在路径行程为55 m和90 m两处产生了较大的跟踪偏差。其中,控制器B的横向偏差涨幅最大,在55 m路段附近达到最大值0.26 m,这说明控制器B设定的预瞄距离在高速下相对不足,使车辆的预见性较差,产生了较大的横向偏差;而采用变预瞄距离控制策略的控制器A仍具有较好的跟踪效果,横向偏差的绝对值在0.18 m以下,其横向偏差的最大值与控制器B的相比降低了31%。
(a)实际轨迹仿真曲线
4 结论
本文提出了一种变预瞄距离的智能车模糊控制策略,给出了一种预瞄距离确定方案和模糊控制器设计方法。结果表明:
1) 预瞄距离对路径跟踪精度有较大影响,本文所设计的智能车路径跟踪控制系统可根据当前车辆的行驶车速调节适当的预瞄距离,相比固定预瞄距离控制方案,跟踪偏差有一定程度的降低。
2) 所设计的模糊控制器控制效果较好,在各种不同车速的行驶工况下,路径跟踪精度均较高,表现平稳可靠。
3)在道路大曲率路段,路径跟踪偏差会变大,后续研究可考虑道路曲率因素对跟踪精度的影响。
