核电厂事故机器人应用研究
2021-05-11王振宇黄伟奇杨剑波
王振宇,黄伟奇,*,孙 健,杨剑波
(1.陆军防化学院,北京 102205;2.成都理工大学,成都 610051)
据统计,1949 年-1999 年世界上发生的主要辐射事故多达136 起[1],最为严重的有美国三里岛核事故、苏联切尔诺贝利核事故、福岛核事故(2011 年),在历次核事故中,机器人都发挥了重要作用。目前机器人在核事故中的应用主要围绕辐射侦察、应急通信、工程抢险补救、环境监测、去污等环节[2],其中最关键的工作是核心区的辐射侦察。本文将围绕辐射侦察机器人在核电厂核事故中的应用及需求进行分析。
1 核事故辐射侦察机器人应用现状
核事故环境复杂、辐射对人危害大,探测任务主要由机器人承担,包括图像侦察和辐射侦察。工作在核心区的辐射侦察机器人的性能要求最高,其获得的事故信息对于事故的缓解、处理具有至关重要的作用。
1.1 三里岛核事故
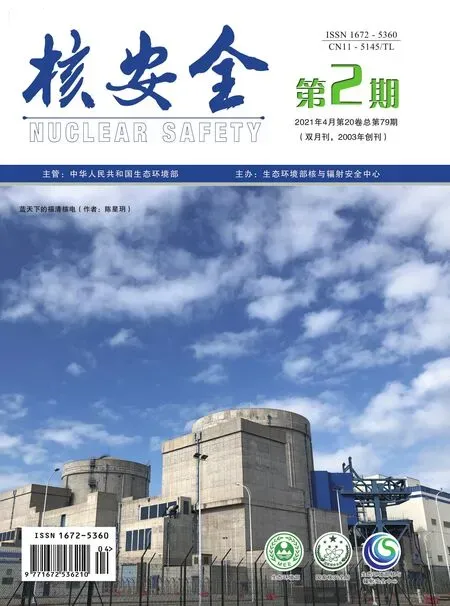
最早在三里岛核事故中应用的探测机器人有ROVER、LOUIE I,主要以轮式和履带式为主要运动方式。ROVER是一辆六轮遥控侦察车[3],具有环境监测、视频传输、采样、去污洗消的功能。有两台ROVER部署在辐射水平为25 mSv/h到10 Sv/h的2号机组地下室,完成了绘制总辐射图、污泥取样的任务[4]。LOUIEⅠ是一辆双履带侦察车,能够传输图像及辐射数据,其主要任务是到达角落进行辐射探测,与ROVER形成补充[5]。这一时期也研究了多足式机器人ODEX-Ⅰ[6]、涉水机器人SURVEYOR、小型环境监测机器人SURBOT、样品采集探测机器人ROCOMP等[7]。
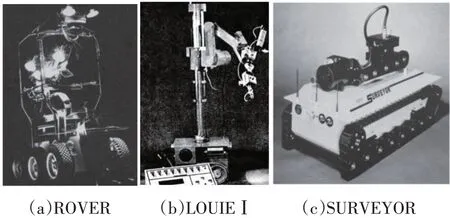
图1 三里岛核事故侦察机器人Fig.1 TMI-2 nuclear accident detection robot
1.2 切尔诺贝利核事故
切尔诺贝利核事故处理期间,机器人也发挥了重要的作用,其中的探测机器人有:PP 系列轮式[8]、履带式探测机器人[8](PP-Г1、PP-Г2)和先锋号(Pioneer)。PP 系列轮式探测机器人主要有:PP-1、PP-2、PP-3、PP-4。PP-1 机器人由苏联中央机器人技术和技术控制论科学研究所(RTC)研制,重39 kg,平均移动速度为0.2 m/s,携带有摄像机、辐射剂量强度测量仪,以外接电缆的方式供电,完成了3 号机组区域汽轮机大厅(500 m2)、4号机组通道、装卸口下厂房(200 m2)的调查任务。PP-2机器人完成了3号机组房顶(800 m2)的调查。PP-Г1、PP-Г2为履带式探测机器人。PPГ1 机器人重65 kg,移动速度0.3 m/s,用于探测楼梯、通道等。PP-Г1 在用于探测汽轮机大厅顶部区域的通道,РР-Г2 型机器人用于 4 号机组塌陷区域和3 号机组顶部的环境侦察。先锋号(Pioneer-1)由美国能源部、美国宇航局、卡内基梅隆大学等单位联合设计,主要用于调查石棺内部情况[9]。先锋号重500 kg,尺寸为L 1219 mm×W 914 mm×H 914 mm,携带有视频系统、取样工具、机械手臂、γ/中子剂量传感器、温湿度传感器等[10],可以收集到堆内温度、湿度、标记放射性热点的数据[11],实时测绘石棺内部3D地图,进而评估石棺结构损坏程度。先锋号的核心部件处于工作区外并通过线缆与车体连接,车载控制电路采用屏蔽盒进行防护,摄像机采用约1.25 cm的薄铅层进行屏蔽,机器人系统可在剂量率5-10 Sv/h 的场合下工作并承受高达10 kSv 的累计剂量[3,9,12]。
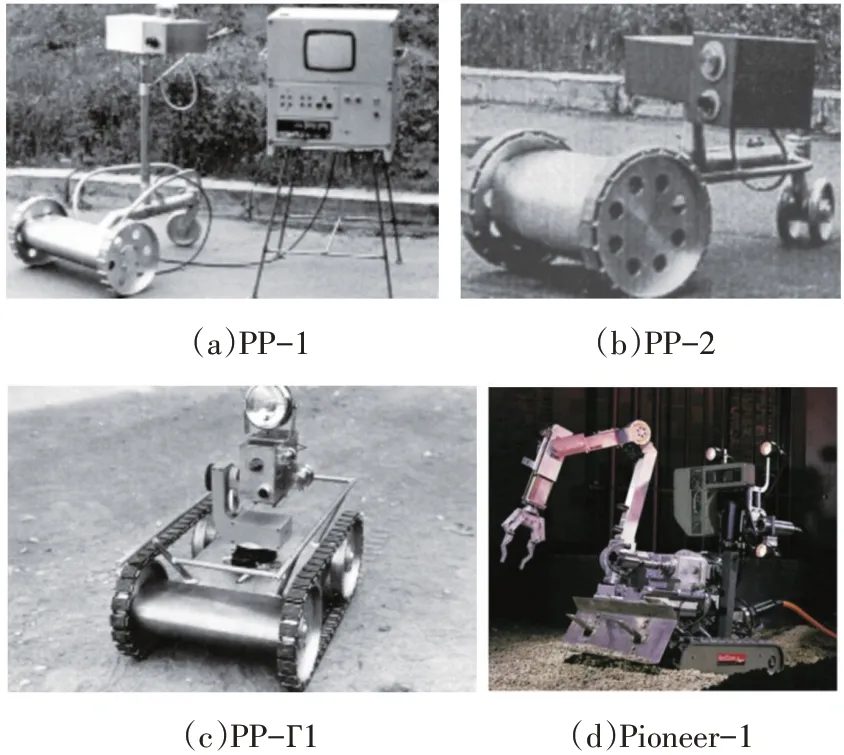
图2 切尔诺贝利事故侦察机器人Fig.2 Chernobyl accident detection robot
1.3 福岛核事故
2011 年3 月福岛核电厂发生了七级核事故。厂房航测任务由美国公司研制的Honeywell 完成,它是一种小型无人机,适合于运送背包和单人操作,是福岛核事故发生后第一时间投入使用的机器人。Honeywell 主要进行空中拍摄和环境测量,并对福岛核电厂燃料池附近的辐射水平进行监测和检查。它拍摄的福岛核电厂1-4号机组照片为评估事故进展,采取有效救灾措施,提供了重要的参考资料[13]。厂房内的探测任务由美国 PackBot、英国 TALON、日本 Quince 和 JAEA-3机器人完成。PackBot 是轻型履带式机器人,重30 kg,最大速度为9.36 km/h,采用无线通讯方式,配有γ 相机、摄像机、辐射剂量仪等设备,主要用于监测1、2、3号机组室内外的辐射剂量、温湿度、氧气浓度、图像等状态[12]。TALON 机器人于5月1日投入福岛核事故救援,其主要工作部件有:绘制辐射剂量分布图系统、防辐射操纵箱、γ射线成像仪、激光3D 成像仪、红外相机[14]。Quince 履带式机器人重约26.4 kg,移动最大速度为1.6 m/s,由日本千叶工业大学、大阪大学和国际救援组织共同研制而成,为了适应福岛核反应堆厂房,Quince 被改装为双绞线电缆信号传输,随后于2011 年 6 月和 PackBot 进行 1-3 号反应堆内部侦察以及2号机组燃料水池调查的工作。Quince可以对建筑物上层侦察。福岛核事故处置中,先后有两台Quince机器人投入使用,其中第一台于10月份检测第三层设备损坏程度时电缆出现故障,至今未恢复。第二台Quince 机器人于2012 年3月投入使用[14]。JAEA-3 是在 JCO 临界事故后,由机器人RESQ-A 改装而来的,配备了伽马射线成像仪,以一根50米长的电缆进行电力和信号传输,于2011年7月2日投入福岛第一核电厂工作,进行2号机组的伽马辐射成像工作。
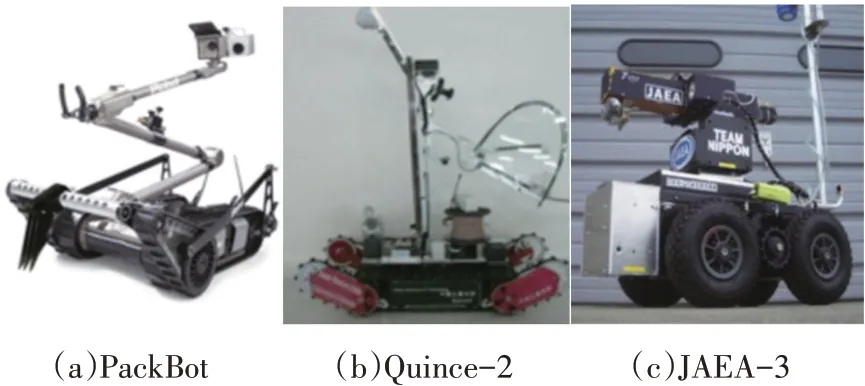
图3 福岛事故前期侦察机器人Fig.3 Early detection robot of Fukushima accident
目前福岛核电厂的处理工作还在继续,探测机器人的种类更多、作业区域更加广泛、更靠近堆芯区域,且增加多种针对具体区域的特种侦察机器人。其中主安全壳内部的侦察工作主要由Small Investigation Device(SID)、Shape-changing Robot、Scorpion完成。Small Investigation Device由东京电力公司开发,双履带式行进,可越过5 cm的障碍,其外壳用3D 打印机制造而成。该设备使用可180°旋转的智能手机进行拍摄,以无线方式进行数据传送,其任务为3 号机组主安全壳(PCV)设备舱口的侦察工作[15]。 Shape-changing Robot[15]是日立GE公司开发的一个主安全壳内部检查设备,它的形状可根据工作的场景进行改变,可以管状的形式穿过狭窄的管道,并在工作时膨胀成U 形以稳定自身。2015 年4 月,该机器人投入到1号机组主安全壳内部栅格表面进行探测。自行式蝎子机器人Scorpion用于探测基座内部结构和落在控制棒驱动装置上的燃料碎屑,它可以通过贯穿口进入安全壳内部进行工作[16]。
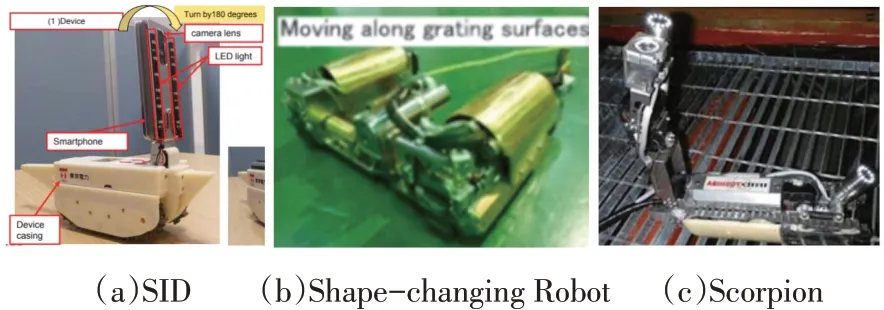
图4 主安全壳侦察机器人Fig.4 Reconnaissance robot of PCV
反应堆厂房各层的探测任务由Kanicrane、Rosemary、Sakura、High-access Investigation Robot(HIR)和 FRIGO-MA 完成。Kanicrane 机器人[15]由日立通用公司开发,重1250 kg,最高移动速度为1.5 km/h。配备有一个可水平旋转345°的伽马相机,数据通过中继器以无线方式传输,用于反应堆厂房一楼4米高处的辐射侦察。Rosemary(65 kg,尺寸为L 700 mm×W 500 mm)和Sakura(35 kg,尺寸为L 500 mm×W 390 mm)由日立GE 千叶理工学院开发,用于探测1-3 号反应堆建筑第二层和第三层。Rosemary 和Sakura协同进行工作,可自行前往充电台进行充电,无需人员更换电池[15]。High-access Investigation Robo(t简称HIR)主要用于反应堆建筑的上层、狭小空间的探测。该机器人可以对最高7 米处的顶部、反应堆上层的管道口和通风口表面进行辐射测量[15,17]。FRIGO-MA(38 kg,尺寸为L 650 mm×W 490 mm×H 750 mm)适用于反应堆厂房内小房间的探测,实际工作中主要对主安全壳的气体控制系统管道进行检测[15]。
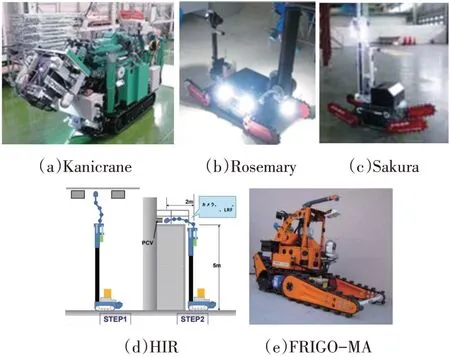
图5 厂房侦察机器人Fig.5 Reconnaissance robot of building
反应堆地下抑压室中有Swimming Robot、Crawling Robot、Telescopic Arm Runner(1-2)、Lake Fisher、VT-ROV、DL-ROV、SC-ROV、Water Boat等机器人进行探测工作[15]。Swimming Robot、Crawling Robot和Water Boat负责抑压室环壁的检测工作。Swimming Robot由日立GE公司开发,重22 kg,尺寸为L 480 mm×W 420 mm×H 375 mm,具有可±45°调整的数码相机、浮力调整和推进装置。Crawling Robot由日立GE公司开发,重40 kg,尺寸为L 650 mm×W 480 mm×H 350 mm,上方和后方各有一个相机,上部相机可在10-90°范围内进行调整,可针对水中管壁进行侦察。Water Boat 是日立通用公司开发的船式机器人,能够漂浮在抑压室内部水面上,主要从内部检测环壁有无泄漏点。抑压室上部的探测工作由Telescopic Arm Runner(1-2)、Lake Fisher 完成。Telescopic Arm Runner(重70 kg,尺寸为L 550 mm×W 509 mm×H 826 mm)是日立GE 公司开发的一款升降机器人,其升降桅杆可达3826 mm 高,用于对抑压室顶部进行侦察。另一个抑压室侦测装备(Telescopic Arm Runner-2)重100 kg,尺寸为L 550 mm×W 509 mm×H 1161 mm,其采取自上而下吊挂相机的方式对抑压室上部进行探测,吊挂长度可达1461 mm,同时配有一个声呐,对水中障碍物进行探测。Lake Fisher 重180 kg,尺寸为L 1038 mm×W 658 mm×H 1016 mm,是履带式机器人。相机装在向下升降的桅杆头部,可对抑压室外侧狭窄处进行侦测。抑压室室外下表面探测装置由三款东芝公司开发的机器人VT-ROV、DL-ROV、SC-ROV 组成。其中,D/W 弯管结合部探测装置(VT-ROV)尺寸为L 300 mm×W 280 mm×H 90 mm,主要用于探测D/W 外壳和膨润管结合部的泄露水。VT-ROV可通过直径350 mm的管道,利用磁石材料附着在钢质外壳和管道上行动,同时具有防水密封结构和最高400-500 mSv/h 和累积200 Gy耐辐射性。排水管探测装置(DL-ROV)主要通过释放示踪器的方式检测排水管出水流泄露情况。其主要性能有:可进入直径350 mm 的管道内;最大防水深度为10 m;具有最高400-500 mSv/h 和累积200 Gy 耐辐射性;工作范围约150-2000 m;探测光源可视距离为600 mm。地下环形室的探测工作由Quadruped 和Survey Runner完成。Quadruped 机器人由东芝公司设计的子母机器人组合,母体重量约65 kg,高106 mm,最大速度1 km/h,可释放子机器人(重约2 kg)用于狭小空间探测,完成了地下环形室内排气管周围的探测。Survey Runner 机器人重45 kg,尺寸为L 505 mm×W 510 mm×H 830 mm,用于2号机组环型室的探测工作。主要性能为:设计了一个长约165 mm 的爬行式履带,可通过最高235 mm的障碍,最大爬升角度为45°,行驶速度最高为2 km/h[15]。

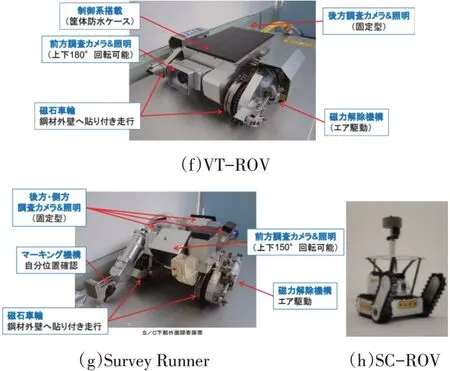
图6 抑压室侦察机器人Fig.6 Suppression chamber detect robot
2 核事故特点与需求分析
21世纪的机器人技术取得了长足的发展,在各行各业的工作中展现出了独特优势。福岛核事故以来,世界各国也愈发重视机器人在核事故中的作用。但核事故环境存在着强辐射场、地形复杂、高温高湿等特点,机器人需要更高的技术性能来适应核环境。
2.1 辐射场强
放射性物质泄露水平是衡量核事故等级的一个重要指标,因此高强度的辐射场是核事故区别于一般应急事故最显著的特征。IAEA在1990年颁布的国际核事件分级标准(INES)[18]中规定等效放射性超过1016Bq131I 的属于7 级特大事故(切尔诺贝利核电厂事故、福岛第一核电厂事故),切尔诺贝利事故厂区部分地方辐射读数达到100 Gy/h[19],而人的半致死剂量为 5 Sv。高精密机器、机械对辐射更为敏感,辐射会激发半导体器件内部的原子,使之产生空穴,严重干扰半导体器件工作,直至瘫痪。在核事故中也发生过多次机器人因辐射失效的案例,例如切尔诺贝利事故中,STR-1在执行清理放射性废物任务时,仅7分钟就失去了行动能力,福岛核事故处理中,Shape Shifiting-2 在探查1 号机组反应堆底座时,由于辐照剂量率过高(4.1 Gy/h)无法返回;TOKYO(AP)在探查2号机组反应堆底座时,由于高剂量率辐射(约80 Gy/h)导致摄像机无法正常工作而返回;Scorpion在探测2号机组反应堆底座内部时,由于高剂量率辐射(70 Gy/h)导致履带无法移动[20]。核事故场景下的辐射种类有很多,由于α、β可以被机器外壳轻易阻拦,对机器人设备起主要影响作用的是中子和γ射线。高辐射场强要求机器人具有较好的辐射防护能力,这也是核事故机器人区别与一般机器人最显著的特征。以往对于电离辐射防护,加屏蔽层是其首选方法,但对于核事故机器人来讲,厚重的铅层会极大地增加机器人重量,限制其运动能力和稳定性,必须在材料的屏蔽效果和密度之间合适选择,目前其技术难点在于新型防辐射材料的研究。
2.2 高温高湿
国际原子能组织(IAEA)核动力反应堆数据库2020年的数据显示[21],世界目前现有的440个反应堆机组中,有67.5%为压水堆,在中国这一比例高达93.9%,此外全球在建核电机组中,压水堆的比例达81.5%。压水堆严重事故也是环境最为复杂的核事故。反应堆事故一般是由于一回路的冷却剂补充能力不足或冷却剂的意外丧失,使堆芯失去冷却,进一步导致燃料棒熔毁。反应堆正常工作时,燃料棒温度约600°左右,发生熔毁事故时其温度可达到2000 °以上[22],除此之外,压水堆严重事故往往伴随着蒸汽爆炸和锆水反应生成的氢气爆炸,使得发电厂厂房内充斥着大量的水蒸气。对于一般机器人和电气设备来说,大量的水蒸气是致命的威胁。即使堆芯熔毁得到了控制,仍会有大量的余热不断释放,于是在事故处理阶段,高温和积水也极大限制了人员和机器人的工作范围。针对这一特点,在福岛事故发生后,人们研究应用了Underwater ROV、Survey Runner、Gengo、Trydiver 等多款适用于水环境的核事故机器人。此外机器人应有较好的热防护技术,以支持其深入堆芯处的探测和工作能力。
2.3 空间狭窄复杂
核事故的发生往往是多种因素综合作用的结果,例如福岛核电厂事故是由地震、海啸引起,各种人为因素导致进一步恶化的。此外核事故也会带来火灾爆炸等次生灾害,多种危害因素的叠加导致核事故场景极其复杂恶劣。核反应堆核岛内的典型设备与系统有:反应堆堆芯、压力容器、蒸汽发生器、稳压器、主循环泵、抑压池、乏燃料水池、通风系统、安注系统、余热冷却系统等。核反应堆厂房是一个高约60 m的庞大建筑,其内部管道错综复杂,各房间结构依据其功能差异较大,可以说是目前最为复杂的工程结构。在火灾爆炸、积水蔓延破坏的情况下,核反应堆厂房内的复杂情况难以想象。例如在福岛核电厂近40年的长期运转过程中,人们在原有机组设备上增加了许多新的控制系统,致使其内部通道更加蜿蜒曲折,空间支离破碎。到事故发生时,进一步增大了内部空间地形的复杂程度。福岛核事故后核事故机器人的运动能力有了较大的拓展,能够较好地适应楼梯、管道、钢材外壁等情况。未来的核事故及常规检查中,应有适用于更多特定场景的机器人,例如微型机器人、移动更加灵活的球形机器人等。
3 总结
本文综述了三次核电厂事故中辐射侦察机器人的性能和作业详情。核事故辐射侦察机器人的发展可以总结为三个阶段:(1)三里岛事故时期:此阶段核事故机器人刚刚起步,以ROVER、LOUIEⅠ为代表的机器人只具有基本的辐射监测、视频传输等功能,并不具备较好的耐辐射能力。(2)切尔诺贝利事故时期:三里岛事故后,人们针对机器人的辐射防护性能进行了研究,以Pioneer 为代表的机器人在耐辐照和核环境探测方面的能力有了较大改进。(3)福岛核事故时期:此阶段发展较为迅速,涌现了大量的核事故机器人,福岛核电厂现役机器的功能更加齐全,呈现小型化、智能化、协同作业的特点。其中典型机器人有:Small Investigation Device、Shape-changing Robot、Quadruped。