煤矿综采工作面智能化开采
2021-05-10
(西山煤电(集团)有限责任公司 山西 030053)
煤矿是中国的主要能源,保证安全高效的开采有着十分重要的意义。随着自动化开采的普及,我国煤矿开采技术实现了由炮采向综采的转化,逐步进入了智能化开采阶段,相关概念逐渐清晰,相关标准规范也在逐步完善。近年来,我国相继发布一些相关规划,设定了我国煤矿智能化开采的目标,为我国煤矿智能化开采指明了发展方向。以往煤岩界面识别被认为是综采面进行无人化开采的必要条件,但是经过国内外的研究和实践表明,虽然从理论上存在可能性但是由于其物理特性的多样性和复杂性使得煤岩界面识别并不能达到预期的效果。因此需要继续探索综采工作面自适应无人开采技术,但是目前在智能化开采的关键技术上还存在一些问题,例如综采技术方面,在原有记忆割煤、过载保护等基础功能上新增加的红外摄像、雷达探测防机械碰撞等功能大都还处在研究阶段,相关技术还有待突破。
1.煤矿智能化开采阶段划分及相关技术
(1)智能化开采阶段划分
智能化开采是自动化开采的高级阶段,通过设备智能学习实现自动化开采,在开采过程中减少了人工的参与,使得开采的效率和安全性都得到了大幅提高。中国的煤矿开采从最初的炮采到半机械化的普采再到现如今完全机械化的综采,正在向着智能化开采发展,但是我国的智能化开采还处在初级阶段。煤矿智能化发展是一个长期的阶段,利用技术特征进行阶段划分可以将煤矿智能化发展划分为四个阶段。
①智能开采1.0阶段。智能化开采的第一阶段是对工作面情况进行感知,包括开采设备的推进速度、所在位置等数据。在这一阶段初步形成以开采系统自动控制为主,人工干预为辅的模式。②智能开采2.0阶段。在第二阶段,智能开采系统需要对开采设备的姿态、围岩部分的信息进行感知,并且需要基于感知到的信息来实现对工作面直线度和关键开采设备姿态的控制,这一阶段仅仅适用于地质环境较好的工作面。③智能开采3.0阶段。在第三阶段,需要在前一阶段的基础上增加对于工作面地质围岩和地理信息的感知,要求在这一阶段初步形成工作面的信息透明化,并且需要在透明化的基础上实现截割方向的规划开采,以便于适应地质条件更复杂的工作面。④智能开采4.0阶段。该阶段是智能化开采的最后阶段,也是理想目标。这一阶段在工作面信息感知上更加全面,在工作面开采设备的控制上人工干预的更少,最后实现回采工作面中开采装备能够自主调节和控制,完成整个采煤过程以及设备的移动,在整个过程中不需要人工的干预。
目前国内只有少部分智能化矿井正在试验智能化开采的第二、第三阶段的部分关键技术,距离智能化开采第四阶段的目标还有很长的距离。
(2)现阶段关键技术
①基于姿态数据的液压支架控制技术。液压支架是综采工作面的关键设备,但为了适应工作面围岩的变化,液压支架的顶梁也会出现相应的俯、仰状态,因此液压支架的姿态数据在防倾倒、防碰撞等业务中显得十分重要。通过在液压支架的底座、连杆、顶梁和护帮位置安装姿态传感器收集液压支架的姿态信息传递给姿态控制器,可以保证工作面液压支架的正常姿态,实现支架对于顶板的有效支撑、避免支架顶梁错茬咬架。通过对液压支架姿态的监控可以对其动作进行检测和控制,保证液压支架与围岩特性相匹配。
②基于姿态数据的采煤机记忆截割。采煤机是综采工作面的落煤设备,目前采煤机的记忆截割功能主要分为:记忆学习、记忆截割、记忆中断、记忆修改四个阶段。采煤机在割煤过程中可以通过分析、记忆自身运行参数,并按照工艺段将这些数据进行保存,根据记忆数据可以实现自动割煤,当遇到异常情况可以切换至手动割煤。当工作面发生变化时,将调整后的采煤机滚筒高度或者牵引数据记录下来可以覆盖原先的记忆数据继续截割。未来智能化开采,采煤机则会基于工作面的地质数据、惯性导航和三维扫描等应用进行工作面态势感知,然后根据工作面透明化模型进行数字化采煤。
③建立智能化巡检系统。通过建立辅助巡检平台并且利用巡检机器人进行工作面巡检职责,巡检机器人作为搭载平台可以装载三维激光扫描设备、惯性导航设备等装置。
2.智能化开采存在的问题
通过分析国内外智能化开采现状以及应用情况,可以总结出目前智能化开采存在的一些问题:
(1)井下开采环境恶劣,煤尘和水雾浓度大会影响摄像机的清晰度,尤其在逆风开采时很难分辨出煤岩界面和采煤机滚筒上沿与液压支架顶梁之间的关系,因此在实际开采中仍然通过人工现场干预。
(2)基于液压支架姿态进行自动化姿态调整并未达到理想效果,仅仅在开采环境较好的工作面进行阶段性的应用。其中最主要的问题在于液压支架的自动化程序和设置参数的静态化与单一化并不能适应复杂多变的开采环境,因此目前还不能作为主流的生产模式长期运行。
(3)采煤机的记忆截割技术目前仍然需要采煤机司机的现场试教,当煤层赋存发生变化时,采煤机并不能自主的进行调整还需要人工在现场进行重新试教,因此目前只适应于条件较好而且简单的工作面,并不能在工作面煤层赋存变化的工作面使用。
(4)目前不能自动进行工作面找直,仍然需要人工每隔一段时间重新进行找直,否则可能出现刮板输送机或者煤壁不平的情况,达不到的“三平一直”的工程质量要求。
(5)目前井下工作面信息感知系统的鲁棒性有待提高,包括传感器、控制系统、执行系统等都需要进一步提升在恶劣环境下的可靠性。另外由于智能化开采中自动化系统目前还并未形成行业标准,因此接入的控制系统良莠不齐,使得自动化系统的整体可靠性和控制机构的实时性不能很好的保障,并不能达到预期的效果。
(6)井下工作面环境恶劣、情况复杂,因此需要针对可能出现的情况进行智能决策。通过实现开采设备的通信接口、协议的互通互联建立起统一的通信平台,以实现决策平台的智能化。在井下遇到相应的情况之后,智能决策平台可以通过专家库系统调用相应的解决办法,通过开采设备的自我调整达到重新工作的目的。
(7)智能化开采的观念以及管理模式都需要提高。在智能化开采的过程中需要明确发展趋势,即:自动化开采时基础、智能化是核心部分、无人化开采是最终的目标。
3.智能化开采技术发展展望
智能化自适应开采技术的系统模型如图1所示,整个系统自下而上分为了四个部分,最底层的执行层、感知层、控制层以及最顶层的分析决策层。其中执行层包括了采煤机、液压支架、刮板运输机、转载机、带式运输机、泵站等一系列综采装备;感知层包括装备感知以及环境感知,装备感知主要是检测综采设备的压力、行程、倾角、电流等运行参数,环境感知层包括激光扫描、可见光视频、红外线视频、瓦斯、钻孔、地质勘探、掘进数据等环境参数;控制层为综采控制系统包括支架电液控制系统、采煤机控制系统、“三机”控制系统、集成供液控制系统、供电控制系统等;分析决策层包括了由综采装备的工况数据建立的数据仓库、包括多信息融合的综采工作面三维物理仿真、工作面找直、煤岩识别、上窜下滑测量等功能组成的智能分析应用以及可以实现采煤机截割模板和支架全程自适应跟机的智能决策应用。工作原理为:执行层的装备通过大量传感器感知自身的工作状态,通过激光扫描、可见光相机、火灾标志性气体传感器以及相关地质数据进行工作面地质环境的感知,通过将传感器获得的大量数据构建成数据仓库,并且利用三维可视化技术建立工作面的三维模型,在此基础上进行工作面找直。最后将智能决策下发给综采控制系统进行控制,实现感知、分析、决策、控制的闭环操作。
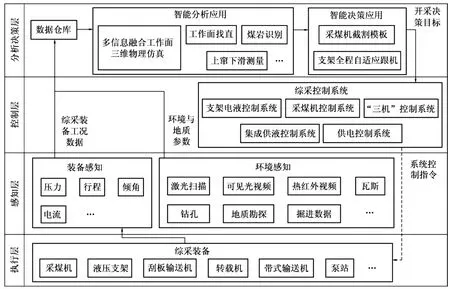
图1 智能自适应无人开采控制模型
4.结语
(1)煤矿的智能化开采不是一朝一夕的,而是分阶段逐步实现的。对煤矿智能化开采的四个阶段进行了简要叙述,总结了每个阶段的典型特征以及技术概要。(2)提出了智能化开采的几点制约因素,包括:井下自动化开采系统的稳定性以及可靠性较差;井下智能化开采设备的自适应能力不足,只能适应情况简单而且情况较好的工作面;智能化开采的思想、管理模式有待提高。并且对未来智能化开采的发展前景进行了展望。(3)目前智能化开采正在朝着第三阶段过渡,但是仍然需要在管理观念、经费投入以及研发团队的建设等方面下功夫。
