基于UWB的船厂物流室内定位系统设计
2021-05-10顾晓波
周 红, 季 铭, 顾晓波
(1.江苏现代造船技术有限公司,江苏 镇江 212003;2.江苏科技大学 船舶与海洋工程学院,江苏 镇江 212003)
0 引 言
随着船舶、海工装备制造业的蓬勃发展,船厂内的生产物流越来越受到造船企业的重视,对产品的制造周期、生产效率和企业运转成本都发挥着重要的影响。在维持当前生产资料投入的条件下,船企通过优化厂内物流计划制订、完善物资定置定位管理、提高厂内物流效率,可在很大程度上节约企业的生产开销,在保障缩短工期的同时可有序完成生产任务[1]。目前,已有相关单位开发出基于全球导航卫星系统(Global Navigation Satellite System, GNSS)的船厂物流解决方案。这些方案大多根据卫星定位终端,追踪物流位置信息,仅适用于室外,钢结构的厂房车间内成为定位盲点,难以满足企业对室内物流定位的需求。随着物联网、无线传感网络等技术的发展,基于超宽带(Ultra Wide Band,UWB)、蓝牙、射频识别(Radio Frequency Identification, RFID)等的无线定位技术成为研究热点,而UWB技术拥有更广泛的应用前景。
1 系统结构
基于UWB的船厂物流室内定位系统总体结构如图1所示,包括标签、定位基站、解算引擎和客户端。标签用于周期性广播报文,与基站相互通信,使其被定位;基站用于接收来载标签的报文,并通过网络将收到的报文上传至解算引擎;解算引擎依据收到的报文信息,按照相关算法,计算出待定位标签(车辆、托盘)的坐标并录入数据库;客户端用于呈现车间道路、工位、车辆、托盘等生产要素的相对位置关系。由于定位基站和解算引擎间采用以太网连接,因此还需要增设必要的网络设备,如交换机、光收发器(光纤)等。
2 硬件设计
2.1 基站设计
基于UWB的船厂物流室内定位系统,其标签与定位基站的共同核心为DW1000芯片,遵循IEEE 802.15.4-2011:UWB标准,抗多径效应能力强[2],功耗低,定位精度高。
DW1000芯片采用低功耗设计,其标准发射功率只有-42 dBm/MHz。若按照传统电路设计,标签与基站间最远可靠测距距离只有约50 m,势必造成车间需要部署大量基站以弥补单基站探测范围小而带来的覆盖不足,进而产生巨额部署成本。因此需要对基站的射频电路做进一步优化,采取适当的措施,增强发射功率并提高接收灵敏度[3],扩大单基站的覆盖范围。
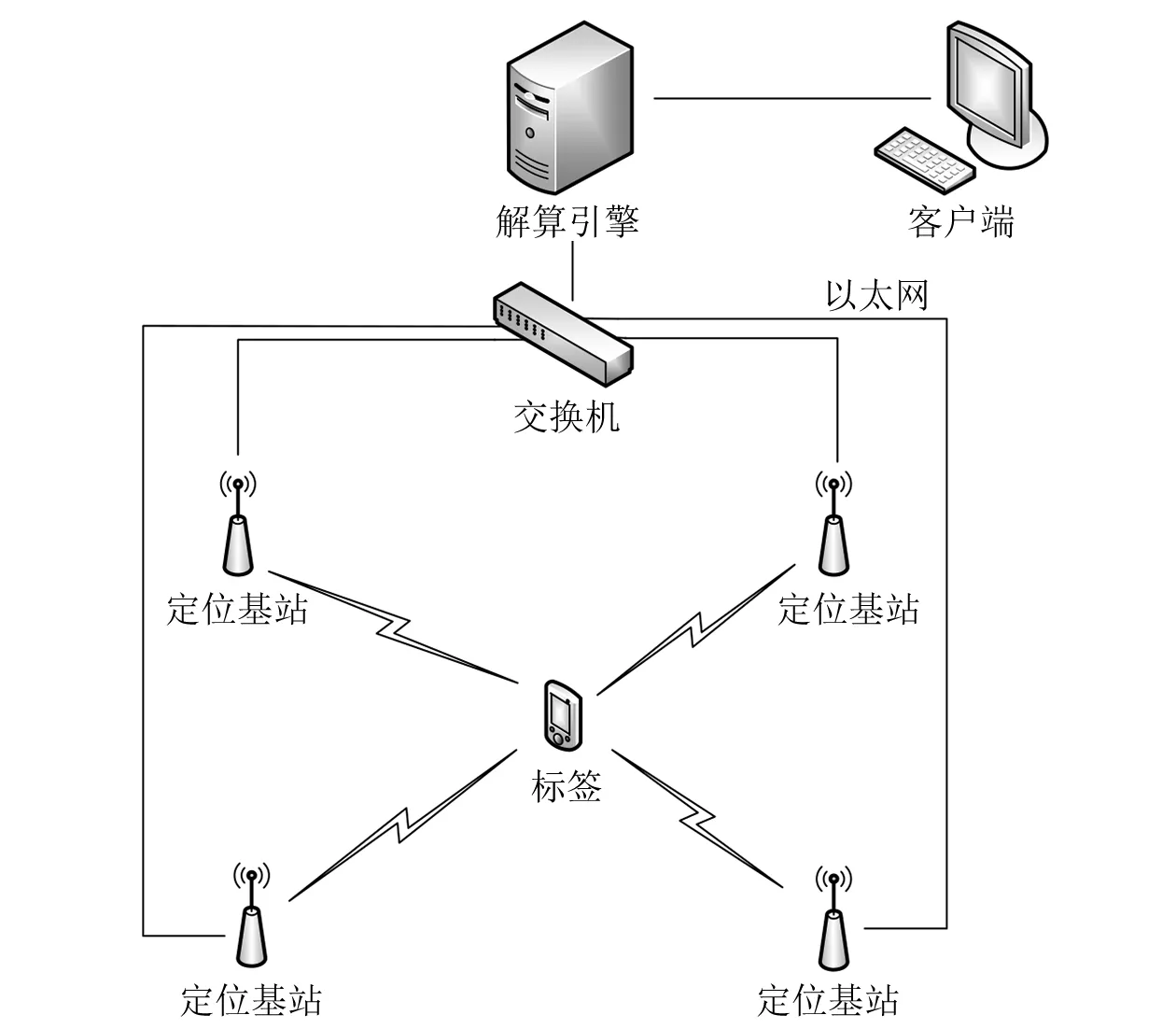
图1 系统总体结构
定位基站针对传统基于DW1000的模块进行电路改进,增加低噪声放大器(Low Noise Amplifier,LNA)、功率放大器(Power Amplifier,PA)、衰减器和射频开关,基站采用以太网供电(Power Over Ethernet,POE)。电路原理结构如图2所示。
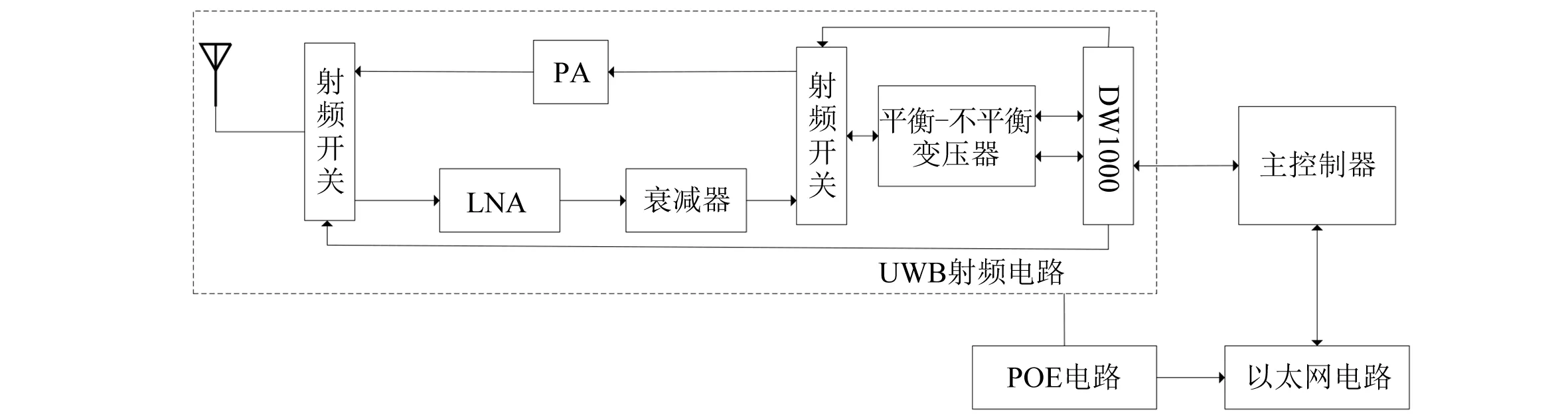
图2 定位基站电路结构
DW1000的射频信号由发射路径与接收路径组成,并通过2个射频开关控制。添加PA可增强发射功率,提升单基站的覆盖范围。在接收路径上添加LNA可降低接收噪声系数从而改善基站接收标签信号的灵敏度。采用POE可改善现场的布线环境,易于安装和管理。
2.2 标签设计
UWB标签部署在车辆等载具上可由电瓶供电,而部署在托盘上则必须使用电池供电,因此优化标签功耗、提升其续航就显得较为重要。由于待测对象通常处于运动或静止状态,运动位置探测需求大,静止位置探测需求低,因此可在标签上添加运动传感器芯片,根据检测到的加速度,动态调整UWB标签射频电路的工作时间,合理优化报文发送频次,降低标签的功耗,延长标签续航。标签电路结构如图3所示。
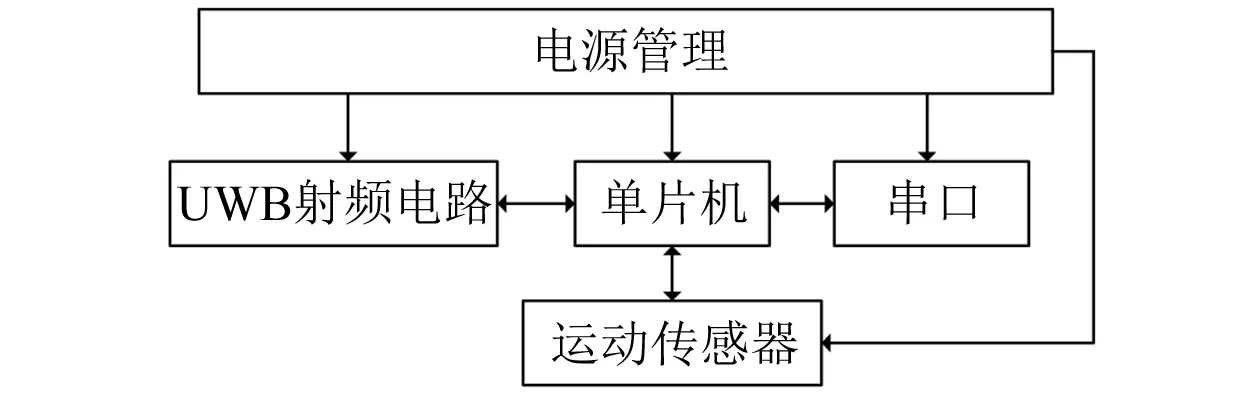
图3 标签电路结构
3 定位算法
目前,常见的UWB定位算法有到达时间(Time of Arrival,TOA)和到达时间差(Time Difference of Arrival,TDOA)。TOA定位通过基站和标签之间的多次通信实现,基本流程[4]如下:
(1)标签广播1个带有自身编号的轮询包,记录发送时间戳并进入接收模式。
(2)基站接收标签发过来的轮询包,记录各标签编号和到达时间戳。
(3)基站进入发送模式,为避免标签接收冲突,各基站分别延时一定时隙,依次向标签回复响应包,并进入接收模式。
(4)标签收到响应包,记录时间戳,然后立即回复1个包含发送、接收时间戳及延时信息的结束包给相应基站,随后进入接收模式。
(5)基站收到结束包并作预处理后上传至解算引擎,然后回复报告包给标签,表明1次测距通信结束。
为1次定位,每个基站和标签之间需要进行4次通信,因此将这种定位方法称为双向测距(Two-way-ranging,TWR)。该方法既占用信道又消耗标签电能,实际应用起来可行性不佳。
TODA由多个时钟完全同步的基站同时接收来自1个标签的报文,对于不同位置的基站,同一个标签的广播报文到达的时间是不同的。定位算法的主要思想是:1组基站测量的时间差能确立1对双曲线,其焦点就是两基站,而待测标签就是在双曲线上的某点。在二维情况下的TDOA定位模型[5]如图4所示。
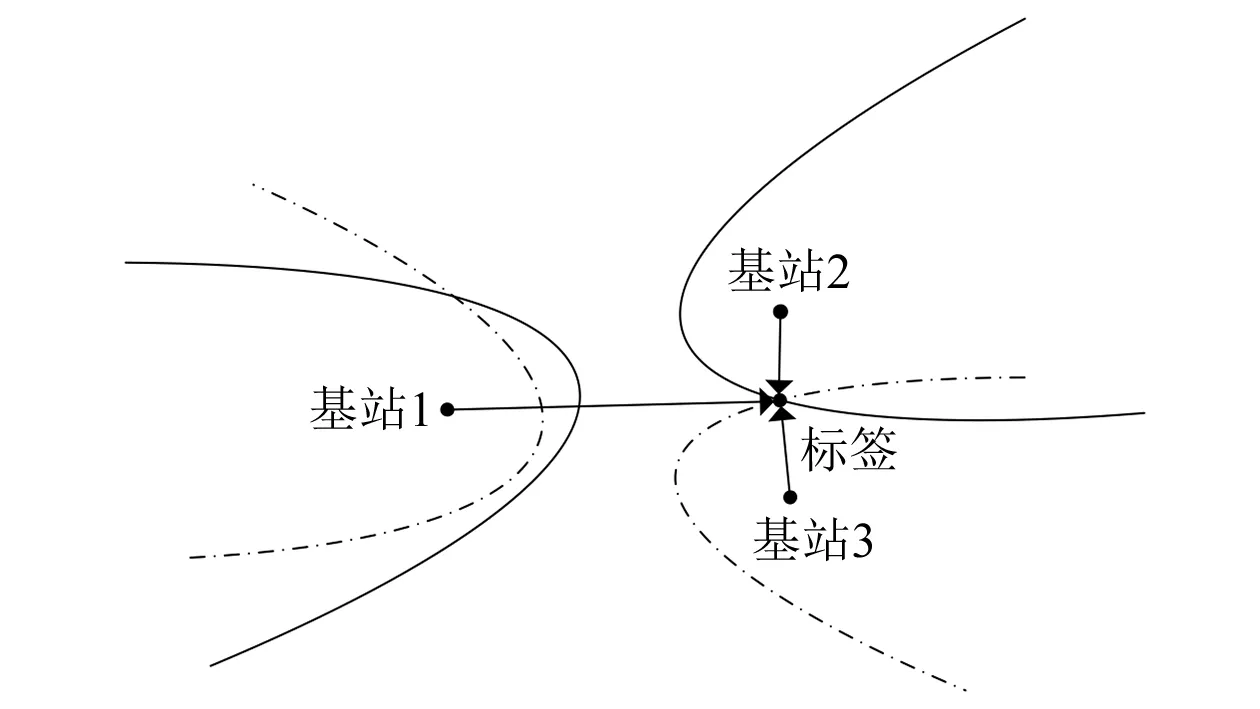
图4 TDOA定位模型
假设标签的坐标是(x,y),第n(n=1, 2, 3)个基站的坐标是(xn,yn),因此可得到二维模型标签的位置为
(1)
式中:r1、r2、r3分别为标签至各基站的距离。
TDOA最终展现出来的是双曲线定位模型,但该模型是非线性方程组。非线性方程组的求解过程比较困难,目前的求解算法主要有Fang算法、Chan算法及Taylor算法[6]等。TOA与TDOA的算法设计对比如表1所示。
4 业务逻辑
基于UWB的船厂车间物流定位系统,配合船厂制造执行系统(Manufacturing Execution System,MES)及GNSS,可实现对船舶制造流程中生产资料运输环节的闭环追踪,提高运输效率,增强管理水平,亦可应用于托盘集配,使企业能更好地把控船舶制造周期,降低物流成本。
以运输环节为例简述定位系统参与生产环节的业务逻辑(见图5):(1)船厂MES系统根据生产计划指派运输任务;(2)驾驶人员接收运输任务;(3)室内和室外的物流定位系统,根据厂区内车辆、货物位置关系及道路占用情况,规划行驶路线;(4)车辆行至场地1,待运货物装车,驾驶人员在客户端(手机或个人数字助手(Personal Digital Assistant,PDA)端)确认(上传)实际装车货物信息,此时货物信息在系统中与车辆坐标绑定;(5)室内和室外的物流定位系统,根据厂区内车辆、货物位置关系及道路占用情况,规划行驶路线;(6)车辆行至场地2,卸下货物,驾驶人员在客户端确认(上传)实际卸货信息,此时货物信息在系统中与车辆坐标解除绑定。
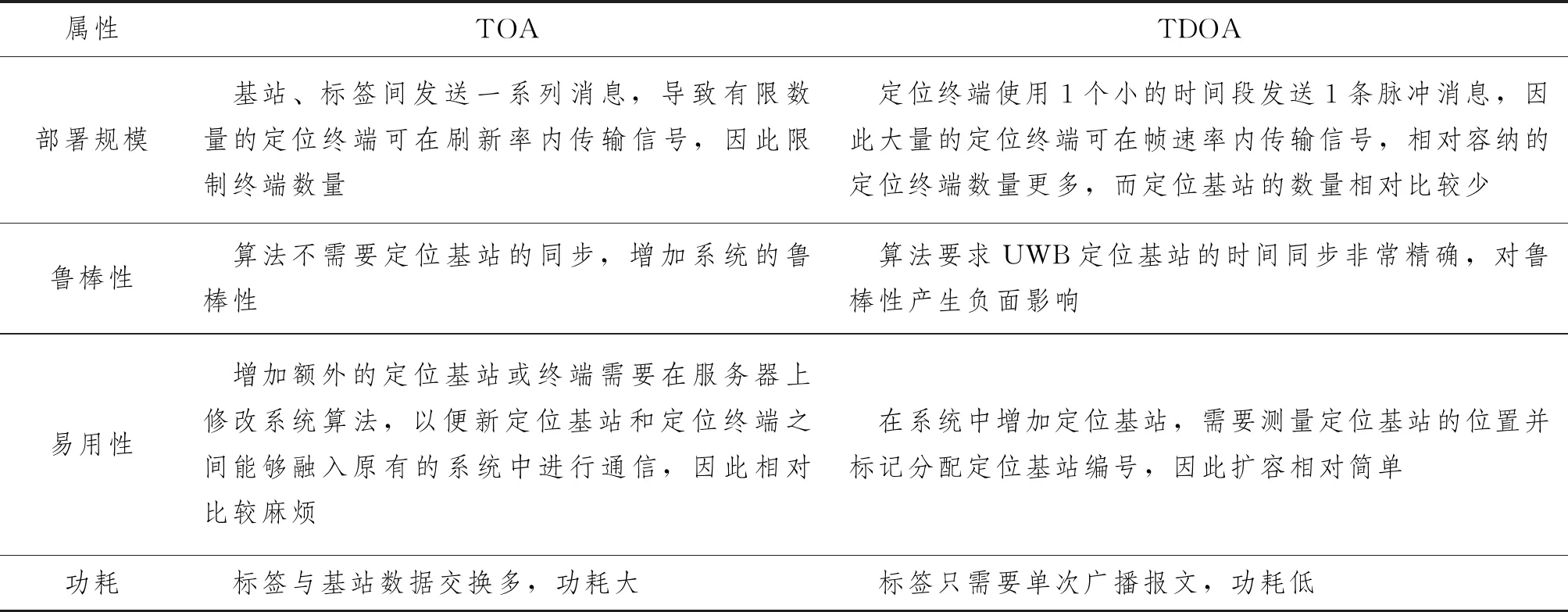
表1 TOA与TDOA的算法设计对比
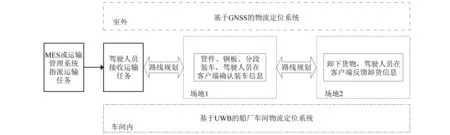
图5 定位系统参与生产环节的业务逻辑
5 结 语
阐述基于UWB的船厂物流室内定位系统的系统架构、硬件电路结构、算法设计思路及业务流程逻辑。该系统契合船舶与海工制造企业的厂内物流信息化、可视化、智能化需求,配合企业的MES,可实现各业务部门对物流信息的共享,增强计划制订部门与基层执行部门间的联动,提高基层执行部门信息反馈的主动性和时效性,有利于提升厂内物流的管理水平。
