大蒜播种机械化研究进展分析
2021-05-09李彦栋牛长河贾生涛
李彦栋,牛长河,贾生涛
(1.新疆农业大学机电工程学院,新疆 乌鲁木齐830052;2.新疆农业科学院农业机械化研究所)
0 引言
大蒜作为一种药食两用的农作物,具有极高的经济价值[1]。我国是世界上最大的大蒜生产国和出口国,根据FAO(联合国粮农组织)数据显示,2018 年我国的大蒜种植面积约79.3 万hm2,约占世界大蒜种植总面积的51.3%,大蒜总产量约2 233.4 万t,约占世界总产量的78.4%。2017 年我国大蒜出口达171.2 万t,占全球大蒜贸易量的78.8%,大蒜出口创汇近22 亿美元。近年来,随着农业产业结构的优化升级,大蒜种植面积连年增加,带动大蒜加工等一系列产业高速发展,这对大蒜主产区蒜农增收致富起到了至关重要的作用[2]。然而以人工种植为主的大蒜种植方式限制了大蒜种植业的进一步发展,人工种植大蒜劳动强度大且效率极低,人力成本占总成本的一半以上,这导致大蒜种植成本居高不下,大蒜种植机械化的实现对提高大蒜种植效益、增加农民收入具有重要意义[3]。
1 国内外现状
1.1 国外现状
欧美等西方发达国家地广人稀,大蒜种植和收获机械化发展早、程度高。如美国、法国、西班牙等发达国家,为了方便大面积机械作业,播种机多为随机播种,效率高,基本可以实现单粒播种,但无法控制大蒜鳞芽朝向[4-6]。
西班牙宝奇公司生产的大蒜播种机[7]精度高,可实现单粒播种,株距、入土深度可调节,并且可以播种不同尺寸级别的蒜种,但该播种机无法控制种植后大蒜鳞芽朝向,且价格昂贵。法国ERME 公司的气吸式大蒜播种机[8]通过采用振动槽来实现蒜种鳞芽朝上,但是由于蒜种调向结构过于复杂,不能扶正蒜种,因此不能保证大蒜直立入土。
亚洲国家大蒜种植农艺要求复杂,且有食用蒜薹的习惯,因此多要求直立下栽,机械化程度低,播种技术大多集中在中国、韩国、日本等国家[9-15]。
日本洋马的PH4R 型乘坐式大蒜种植机[16],如图1。通过人工投种实现大蒜直立播种,但存在伤种、蒜种直立度低、种植过深,垄间间距过大等问题。
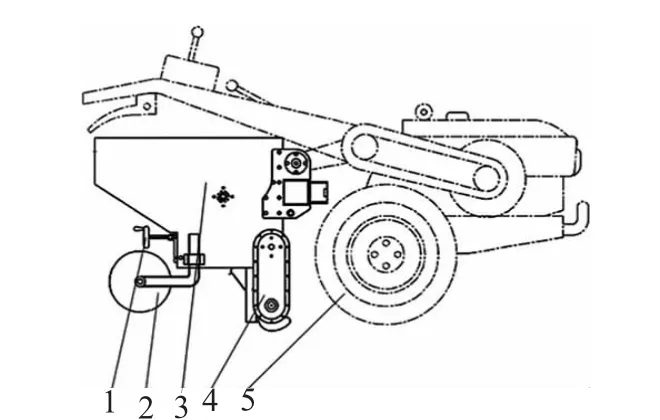
图1 PH4R 型乘坐式大蒜种植机
金怡韩[17]等人在2016 年改进了原有大蒜播种机,如图2。通过对压土辊增加刮土装置解决了压土辊覆土效果不理想的问题,同时,改进的大蒜播种机放弃了原有的排种方式,采取了勺式取种,达到了单粒取种的目的,但新机型仍无直立下栽部件,取种勺向下运动时可能会造成大蒜机械损伤,导致大蒜无法出苗或苗株孱弱[18]。
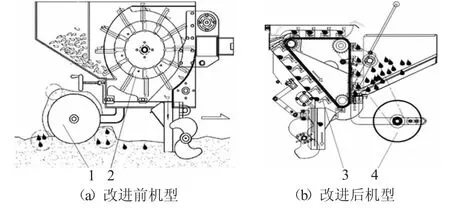
图2 旋耕式大蒜播种机
金成秀等人2013 年发明的旋耕式大蒜播种机[19]如图3。该机旋耕部件和播种部件动力均由一种小型手扶拖拉机提供,一次性可播种6 行,由于旋耕部件对地面进行了平整作业,极大地便利了后续的播种作业,提高了播种机作业的连续性,大大降低了因上季农作物残茬缠绕等造成的故障。但该播种机也未解决大蒜直立下栽的大蒜种植关键问题,并且大蒜播种和旋耕均用同一套系统传动,增加了播种机传动系统故障率。
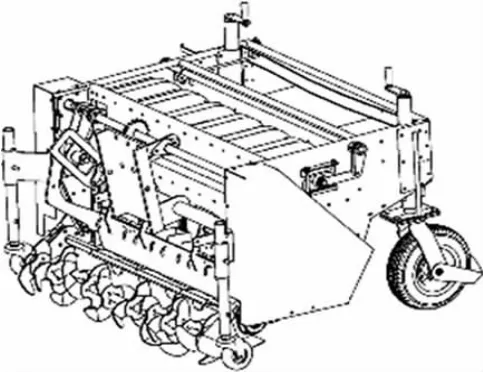
图3 旋耕式大蒜播种机
同年朴德泉等人设计的自走式大蒜播种机[20],如图4。该机由一台内燃机提供动力,播种机设置操控台,由一名驾驶员进行操控,作业灵活。蒜种经机械结构顶升后由圆周旋转的刷子扫入播种管道,落入开沟器开好的沟内,经由覆土机构覆土后完成播种,由于缺少蒜种调向机构,该机构仅能一定程度上实现单粒取种,不能完成直立下栽的农艺要求。
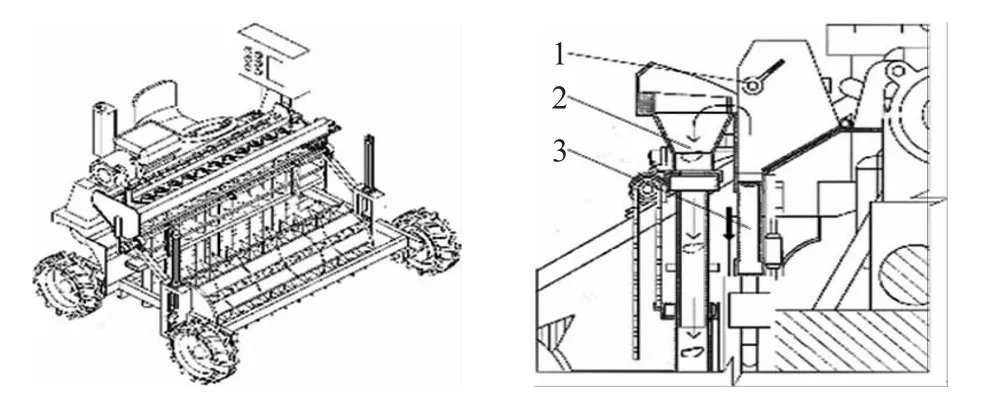
图4 自走式大蒜播种机
河宗友[21]在2016 年对该机型进行了改进,如图5。该机将倾斜的排种机构改为竖直方向,解决了蒜种无法正确投入直立下栽机构的问题,但该取种机构仍存在重播、漏播等情况,因此设计了两个人员位置进行人工检查,导致了该机播种效率不高。
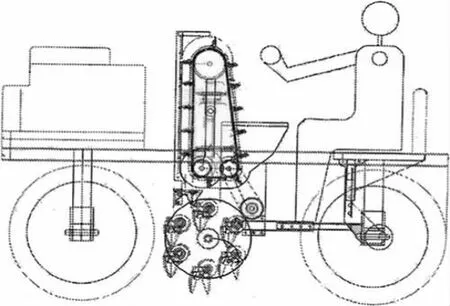
图5 河宗友改进的大蒜播种机
马耀旺在2016 年设计的大蒜播种机[22]如图6。该机通过转盘取种勺进行取种,投入输种管,通过中间转盘一粒粒投入下栽转盘完成播种。该机械基本能实现单粒播种,但仍存在诸多问题,种箱内蒜种愈少取种盘在种箱内取种难度愈大,蒜种在输种管出口容易堵塞,输种管、中间转盘与下载转盘之间存在的间隙可能会导致卡种、伤种。
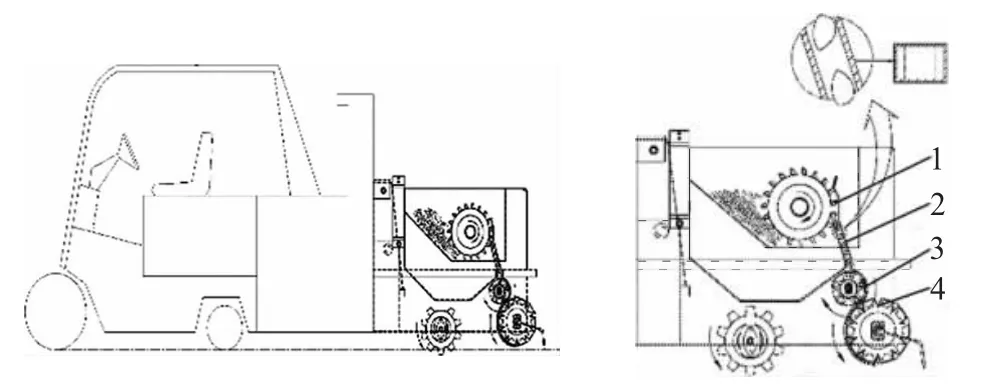
图6 马耀旺设计的大蒜播种机
朴英植[23]在2017 年设计的大蒜播种机如图7,该机由小型拖拉机牵引,地轮驱动播种部件并且为喷药作业提供动力。
严勇均[24]在2019 年发明的大蒜直立播种机,其蒜种调向机构通过不同孔径的长条筛水平径向振动,调整蒜种根部朝下,落入下栽机构完成栽种,该机型播种的大蒜正芽率高,但调向机构对蒜种大小均匀度要求较高,蒜种较小无法进行调向,蒜种较大可能会卡住影响后续播种,因此播种前需人工或机械对大蒜进行筛选,一定程度上增加了成本。
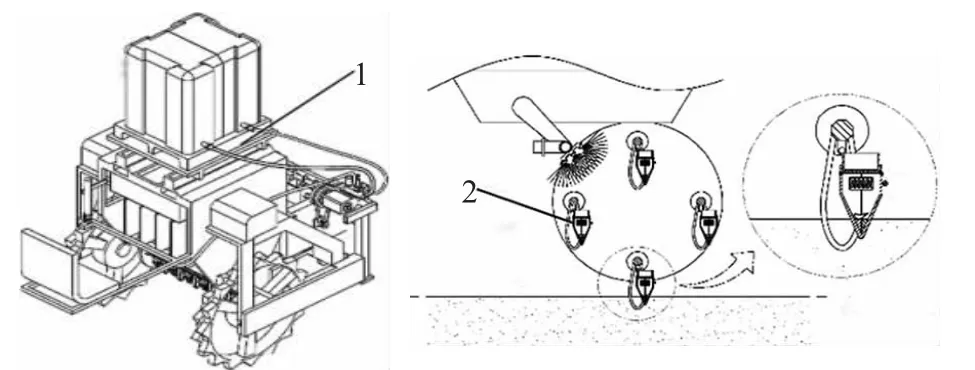
图7 自动喷药大蒜播种机
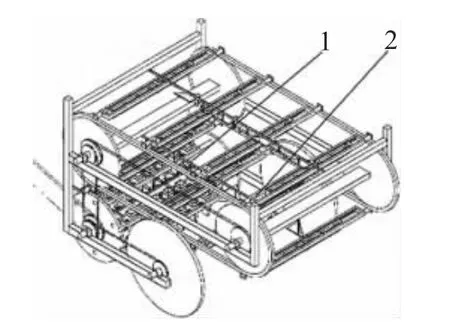
图8 严勇均设计的大蒜直立播种机
1.2 国内现状
国内大蒜种植机械多以直立、单粒、等行距为种植目标。现阶段我国大蒜种植机械有以下几种机具。
2014 年山东省农业机械科学研究院崔荣江等人设计了一款大蒜播种机[25],如图9。该机包括机架、单粒取种装置、直立下栽装置、大蒜鳞芽方向控制装置,传动总成为单粒取种装置、直立下栽装置和大蒜鳞芽方向控制装置提供动力。可实现邻行错位直立播种,利于大蒜生长和实现机械化收获。
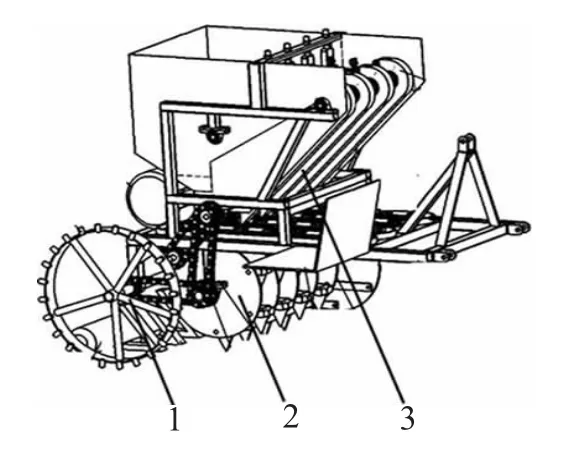
图9 大蒜播种机
2018 年山东省玛丽亚农业机械有限公司辛丽在现有基础上设计了旋耕式大蒜播种机[26],如图10。该机增加了旋耕装置和整地装置,可实现旋耕、整地、播种一体化。
2015 年天津理工大学张登权、张创开、吴艳娟等人设计了一款大蒜播种机[27],如图11。该机能够解决蒜瓣方向识别以及蒜瓣下栽直立的关键技术问题,采用二次蒜瓣定向辨识的方法,一次辨识是运用重力原理与蒜瓣的特殊形体结构相结合的方式,二次辨识是采用电气控制的方式,将蒜瓣的特殊形体结构检测输入到单片机,分析数据进而分辨,经过两次辨识提高蒜瓣辨识精确度,同时本实用新型能够将蒜瓣压入土壤,竖直固定好,且结构简单,自动高效。
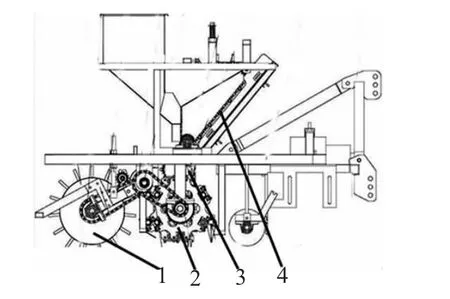
图10 旋耕式大蒜播种机
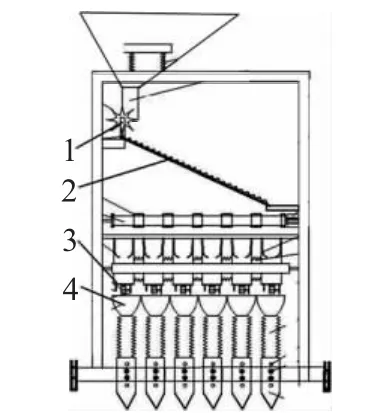
图11 单片机识别式大蒜播种机
2017 年临沂凤林农机制造有限公司杨青设计了液压驱动式大蒜播种机[28],如图12。整机包括机架、旋转机构、底盘、液压泵、驱动装置以及液压油缸,液压油缸垂直固定于机架和底盘之间,且液压油缸相对于机架或底盘可旋转。液压驱动式大蒜播种机能够在播种到地界位置处时,实现旋转,进而在该位置播种。
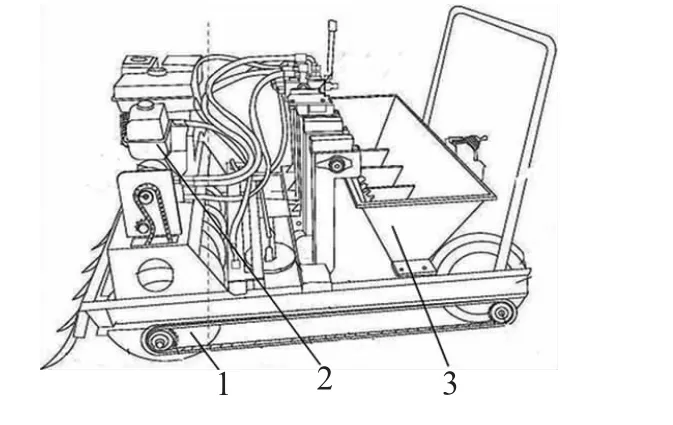
图12 液压驱动式大蒜播种机
2017 年天津理工大学吴艳娟、郭彦楠等人设计了一种智能大蒜播种机[29],如图13。该机包括车体、盛蒜装置、吸蒜装置、传蒜装置、图像采集装置、开沟装置、栽种装置、培土装置、压土装置、清洁装置、动力装置和控制系统。可实现等株距、芽朝上、直立播种模式,采用图像识别技术应用于识别种子的芽根部位,设计智能栽种机械手按种子芽根部位进行抓取,实现了单粒种子竖直下栽。
2019 年徐州三石工控科技有限公司王成文、钟志堂、崔军等人设计了六行手扶式大蒜播种机[30],如图14。该机包括车架、栅条辊子、扶手、后行走总成、种仓、开沟器、转向总成、划行器和动力系统。该机适用于小规模种植,且操作简单、机具成本低。
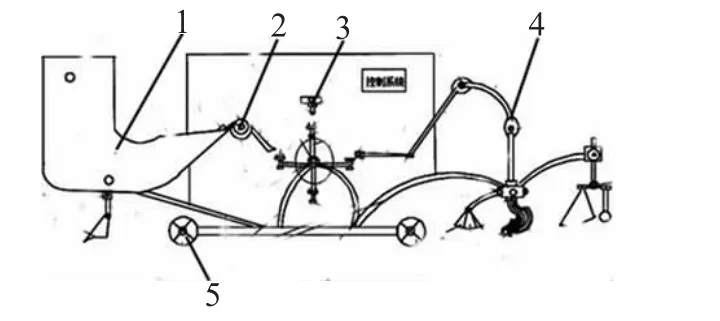
图13一种智能大蒜播种机
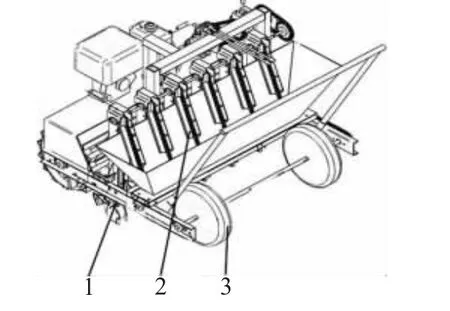
图14 六行手扶式大蒜播种机
2 讨论
现阶段我国大蒜播种机处于飞速发展阶段,已经基本实现单粒取种、蒜种鳞芽方向控制、直立下栽等技术突破。
大蒜播种时蒜种间隔对大蒜的产量也有很大的影响,国内大蒜播种机调节蒜种间距仍然较为繁琐,国外的气吸式排种器在一定程度上解决了精密排种的问题,提高了播种的效率,增加了产量。
大蒜播种机要根据不同地区种植农艺要求进行针对性的设计。如丘陵山区需要采用小型播种机,而平原地区采用大型机械,干旱地区要进行铺管覆膜,有利于提高机械利用率和提高大蒜生产效率。
大蒜播种机械关键技术主要集中在大蒜播种机的蒜种直立栽种控制技术和蒜种鳞芽方向控制技术两个方面,因此着重发展蒜种鳞芽方向控制技术和蒜种直立控制技术的自动化和智能化,是提高大蒜种植产量和生产效率的必然选择和趋势。如用图像识别技术应用于识别种子的芽根部位,设计智能栽种机械手按种子芽根部位进行抓取,可实现单粒种子竖直下栽。
