《焊接机器人操作与加工》课程模块化与教学改革实践研究
2021-05-07张正鑫孙晓楠
张正鑫,孙晓楠
(天津石油职业技术学院,天津 301607)
一、模块化教学改革的研究现状与存在问题
(一)研究现状
国外职业教育领域关于模块化教学改革的研究以德国应用科学大学(高等专科学校)为代表,其教学改革的核心是“围绕学生的能力培养将培养目标、教学环节、课程体系、教学内容、教学组织、评价体系等方面的教学改革贯穿于人才培养的始终”,其教学改革的思路源于应用型、复合型人才培养等核心教育理念。
借鉴德国职业教育模块化教学改革成功经验,国内已有较多的应用型本科院校和高等职业院校相继开展相关研究。研究的视角主要有两个,一是模块化课程体系构建,二是课程模块化教学改革。其中,模块化课程体系构建的研究重点是对接工作实际,分析、梳理岗位(群)能力需求和理论知识体系,以能力为导向,打破学科体系和课程界限,重构专业课程体系并将其模块化,注重跨学科模块的构建,为复合型技术技能的培养奠定基础。课程模块化教学改革的研究重点是以岗位职业能力为导向,确立课程教学目标,整合和重构课程教学内容,基于能力导向筛选知识点和技能点并将其模块化,突出学生岗位能力培养。模块化课程体系构建和课程模块化教学改革虽属两个不同层面,但都遵循模块化教学改革的基本理念。
(二)存在问题
就国内职业教育领域关于模块化教学改革研究来看,主要存在两个方面的问题。
1.课程体系和课程内容模块化的能力导向不够清晰。问题的主要表现是课程体系的模块化与专业能力结构的对应关系不清晰,课程内容的模块化与岗位能力的对应关系不清晰。其主要原因是作为模块化教学改革实践与研究基础的对接生产过程或工作过程的岗位(群)能力结构没有被建立。较多的课程模块化教学改革研究不仅没有建立岗位能力结构,而且课程内容没有基于能力导向梳理筛选知识点和技能点,因此课程模块化的能力导向不清晰。
2.模块化教学改革实践研究的维度比较单一,基于能力导向的教学改革力度不够。问题的主要表现是较多的模块化教学改革过于注重课程体系模块化或课程内容模块化研究,疏于基于能力导向的课程教学设计、教学过程改革、教学方法改革等方面的实践和研究,课程模块化研究与基于能力导向的教学改革实践结合得不够紧密。
二、课程模块化教学改革的两个作用
(一)服务企业发展的靶向作用
课程模块化教学改革包含两项重要工作,一是以能力为导向的课程建设,二是基于能力培养的教学改革。两者必须对接生产过程或工作过程,对标企业岗位能力需求。因此,课程模块化教学改革主要解决两个问题,一是明确企业岗位需要什么人,二是怎样满足岗位需要培养人。由此可见,课程模块化教学改革具有服务地区经济发展的靶向作用。
(二)目标达成的基础作用
课程是教与学的重要载体,是教学改革平台和能力培养的基础。课程模块化教学改革是以能力为导向组织构建教学模块,梳理筛选知识点和技能点;以能力培养为目标设计教学过程,实施教学改革,促进教学目标达成,提高人才培养质量的一种基于课程建设的教学改革实践。课程模块化教学改革有利于课程建设水平和教师教学能力的提升,有利于学生学习能力和岗位能力的培养,对于人才培养质量的保障更能发挥扎实的基础作用。
三、以能力为导向的《焊接机器人操作与加工》课程模块化
装备制造是“京津冀”一体化区域重要的经济支柱。智能制造技术是装备制造企业提升制造水平和行业竞争力的重要引擎。焊接机器人作为典型的智能制造技术装备具有自动化程度高、焊接加工效率高、焊接质量和稳定性好的特点,在大中型制造企业有着广泛的应用。
《焊接机器人操作与加工》是高职院校焊接技术与自动化专业核心课程,主要任务是培养学生具备按照工艺规程示教机器人完成焊接加工的技术技能。为了更好地服务区域经济发展,培养满足智能制造重点行业企业需求的高素质技术技能人才,课题组以《焊接机器人操作与加工》课程为模块化教学改革载体,基于行业企业调研搭建岗位能力结构,对标机器人焊接加工能力优化课程模块,基于能力导向筛选知识点和技能点,设计教学任务和目标,为基于课程模块化的教学改革奠定良好基础。
(一)对接人才需求,搭建能力结构
课题组基于智能制造企业调研,观察变压器气密箱体机器人焊接加工、热交换器管板对接机器人焊接加工、钢架结构机器人焊接加工等生产过程,了解机器人焊接加工的产品类型,综合分析接头形式、工艺路线、板材厚度等机器人焊接工艺特点,掌握维护保养、示教操作、焊接加工、质量检验等焊接机器人全生产周期对岗位的能力需求。在此基础上,我们梳理总结出六项焊接机器人岗位能力,即薄壁结构件焊接加工、中厚壁结构件焊接加工、复杂结构件焊接加工、焊接机器人维护保养以及岗位人员必须具备的交流协作和分析、解决问题能力,搭建焊接机器人岗位能力结构,如图1所示。
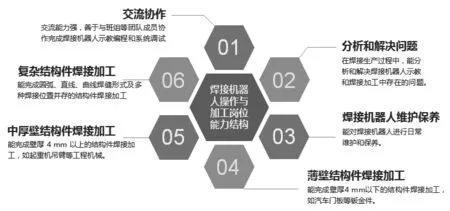
图1 焊接机器人岗位能力结构
(二)对标岗位能力,构建课程模块
根据焊接机器人岗位能力结构,基于知识点衔接关系和能力支撑需要,我们构建了焊接机器人基础知识、示教器基本操作与焊接机器人日常维护、机器人运动控制与简单程序编制、薄壁结构件焊接加工、中厚壁结构件焊接加工、复杂结构件焊接加工共计六个教学项目,并遵循循序渐进和学生认知规律序化、细化教学项目,设计教学任务。
在焊接机器人岗位能力结构中,交流协作能力、分析和解决问题能力是胜任生产岗位的两个重要能力。鉴于培养途径和培养方法的不同,这两个能力目标需通过教学策略改革和教学过程改革予以实现。
(三)产教对接,筛选组织知技点
以教学项目四薄壁结构件焊接加工为例。我们根据企业典型的箱体焊接加工、热交换器管板对接焊接加工等薄壁结构件机器人焊接生产任务,以T形接头角焊缝为典型案例组织课程内容,设计直焊缝和圆弧焊缝薄壁结构件焊接加工两个教学任务。
基于机器人焊接知识点衔接和能力支撑关系、工艺路线复杂程度,我们将教学任务做了进一步分解,设计形成单立板直焊缝薄壁结构件焊接加工等四个子任务(如图2-1所示),并筛选知识点和技能点(如图2-2所示)。在此基础上,将薄壁结构件焊接加工能力要求碎化为每个子任务的知识目标、能力目标和素质目标,并遵循目标递进,能力递升,综合素质增强的原则将子任务序化。
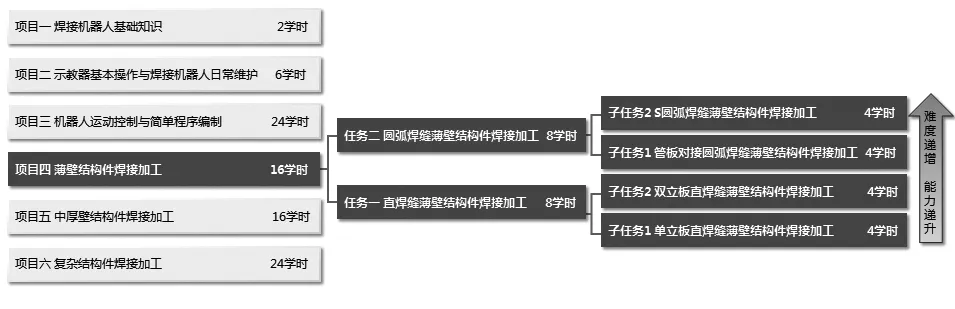
图2-1 薄壁结构件焊接加工教学任务的细化和序化
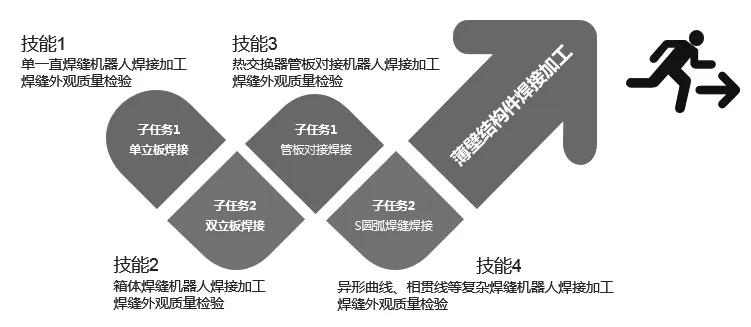
图2-2 薄壁结构件焊接加工知技点筛选
四、基于能力培养的《焊接机器人操作与加工》课程教学改革与实践
(一)教学策略改革与实践
1.精准施策,提高学生学习能力和分析、解决问题能力
鉴于焊接机器人岗位提出的分析和解决生产实际问题的能力需求,我们设计使用了PBL教学策略,将生产中焊接机器人示教操作的常见问题引入教学,在教学过程中引导学生从“发现问题”到“学习思考”,从“分析原因”到“解决问题”,通过学习能力的培养提高学生分析问题能力,通过教学做一体化提高学生解决生产实际问题的能力。
众所周知,知识链是人们学习思考的逻辑基础。多数教师习惯于在教学过程中将因果联系紧密的知识作为一个整体传授给学生。但事实证明,在这样的学习过程中学生被动得像囫囵吞枣,失去的是学习兴趣和学习能力。在《焊接机器人操作与加工》课程教学过程中,我们运用PBL教学策略“剪断”知识链,翻转因果联系,让学生在机器人示教操作中遇到问题,即先发现“果”,然后让学生从思考“因”开始探究知识。
例如,在讲授MOVEC指令插补原则之前,教师在课堂发布任务,让学生示教机器人完成S圆弧焊缝焊接加工任务。在示教操作过程中,机器人焊枪必然会偏离预定的焊接工艺路线,这是企业焊接机器人示教工作中常见的“轨迹偏离”问题。更重要的是学生运用此前已掌握的知识无法解决这个实际问题。在抛出问题后,教师在启发学生思考过程中精讲知识点,在操作指导中建立知技点衔接关系,提高学生学习能力和分析、解决问题的能力。
2.创新运用教学手段,提高学生操作加工能力
在教学过程中,我们一方面综合运用翻转课堂、混合式教学等教学模式突出教学重点,另一方面创新设计和运用教学手段突破知识和技能教学难点。例如,我们将机器人示教和焊接加工中常见的生产事故,通过虚拟仿真系统,运用“试错”教学手段予以展现,并通过事故再现的方式强化记忆,让学生掌握机器人操作加工的每一个知识要点和操作要领。除此之外,我们还设计并运用了投屏直播教学系统,增强“虚拟示教”和机器人示教的示范有效性,提高机器人操作和虚拟操作人均学时占比,有效提高学生操作能力。
3.趣味化学习要点和要领,巩固强化技术技能
在教学实践中,我们还归纳了机器人示教知识要点,提炼了机器人操作要领,用“翻山越岭”、“画龙点睛”、“合久必分”等具体或形象的口诀将机器人焊接工艺路线设计、编程指令运用技巧、轨迹偏离的避免方法等知识要点、操作要领趣味化,以增强学生记忆,有效地强化了学生对焊接机器人操作加工技术技能的掌握。
(二)教学过程改革与实践
在教学过程中,我们还开展了教学过程改革和实践,将课堂教学前展后伸至课前和课后,理清课前、课中、课后教学活动意义,基于能力培养设计并实施了课前自主学习、明确能力目标,课中探究实践、掌握技术技能,课后拓展练兵、丰富教学成果的教学过程。
1.课前自主学习
课前,教师基于网络平台发布学习任务清单、机器人焊接加工工单,发布微课、导学视频等学习资源。学生基于移动终端在课前明确学习目标,对照导学视频中的操作演示完成仿真预调试任务,了解焊接加工工艺路线设计方法和机器人示教操作过程,提前建立感性认知,并基于线上作业完成情况,助力教师及时掌握学情,有的放矢地答疑解惑,选择和调整教学策略。
2.课中探究实践
课中,教师设计并运用“五导”教学法,即“教学导入、问题导向、引导思考、辅导学习、指导操作”,组织学生课中探究和实践。教师通过生产情境导入企业案例,明确教学的实践意义,基于师生互动,导入教学重点;根据课前学情分析,以机器人焊接生产实际问题为导向,对接教学过程和工作过程,引导学生思考和解决问题;根据课前作业完成情况,抓住显现的问题“要害”,教师“对症下药”辅导学生掌握知识点;在教学过程中突出实践训练,发挥学生主体作用,强化机器人示教操作演示,指导学生实践并掌握技能点。
3.课后拓展练兵
课后,教师根据教学需要和学生求知需求发布学习资源,拓宽学习渠道和学生知识面;定期开放焊接机器人实训室,给予学生更多的实践指导和操作时间,巩固所学技能;搭建竞技平台,举办校内机器人焊接技能大赛,检验课程教学质量。
(三)教学效果与目标达成
1.教学效果
在教学策略改革与实践中,我们结合教学任务难点和课业完成情况分析掌握学情,有针对性地选用教学方法和教学策略,有效提高了学生的学习积极性和有效性。特别是对接生产实际问题的PBL教学策略的运用,真正地激发了学生探究学习的主动性,从过程考核的结果来看,学生的学习能力和思考、解决问题的能力切实得到了提高。
2.目标达成
教学过程改革与实践中,教师通过课前任务的发布让学生明确能力目标,基于课堂翻转奠定学生学习和实操基础。学生通过课前任务的完成暴露学习难点,教师在课中“对症下药”精讲知识难点,直播演示操作难点,通过对知识难点的二次测试促进知识目标有效达成,通过机器人焊接加工的操作指导和实操考核促进技能目标的有效达成。