基于STATCOM的风电并网系统阻尼特性优化控制设计
2021-05-07周宇健匡洪海高闰国
周宇健,匡洪海,钟 浩,高闰国,郭 茜
(1.湖南工业大学 电气与信息工程学院,湖南 株洲 412007;2.三峡大学 梯级水电站运行与控制湖北省重点实验室,湖北 宜昌 443002)
1 研究背景
近年来,随着环境问题的日益严峻,以及煤炭和石油等不可再生资源的逐渐消耗,利用太阳能、风能、地热能、潮汐能等各类分布式清洁能源的分布式发电(distributed generation,DG)技术已经成为热门课题之一,尤其是以风电为代表的分布式发电技术得到了许多学者的重视。但是由于风电等分布式发电受自然条件的影响较为明显,这些可再生能源的“间歇性”特点会对电力系统的稳定性和电能质量造成不利的影响,所以需要对其并网技术进行研究[1-2]。静止同步补偿器(static synchronous compensator,STATCOM),作为近年来风电场热门的无功补偿装置,类似于静态无功补偿器,它是一种并联型的柔性交流输电(flexible alternative current transmission systems,FACTS)设备,同传统的静止无功补偿器(static var compensator,SVC)相比,其体积较小、调节速度较快,运行范围较宽,性能上有极大的优越性[3]。STATCOM 通过电压源转换器进行电压调节,可以快速地控制电压幅值和精确控制相位角,具有改善系统阻尼以及系统电压分布的特性,在增强系统阻尼并且抑制系统区域间振荡中起着关键的作用[4]。
文献[5]对不同风机模型进行了比较分析,并通过采用静止同步补偿器STATCOM 控制来解决双馈风力发电场并入系统稳定性的问题,仿真结果表明,当系统受到大扰动时,STATCOM 能有效地使转子转速和并网处电压快速地恢复正常;文献[6]对不同风电场动态模型进行研究,分析风电场并入系统引发的电力系统低频振荡、次同步振荡和超同步振荡问题,研究结果表明,大规模风电并网的增加会使区域间的阻尼大大减弱,给电力系统的稳定性带来巨大的挑战。文献[7]提出基于粒子群优化算法(particle swarm optimization,PSO)的SVC 附加阻尼控制器参数优化设计,结果表明,当系统受到大扰动时,所设计的SVC 附加阻尼控制器能够很好地对故障所引起的功率和电压振荡起到阻尼作用,提高系统的稳定性。但SVC 相比STATCOM,其采用的是半控型器件,当系统电压下降时,无功控制能力会减弱,受系统电压影响较大,电压支撑能力弱于STATCOM。文献[8]提出了基于灰狼优化算法(grey wolf optimizer,GWO)的静止同步串联补偿器(static synchonous series compensator,SSSC)阻尼功率振荡控制器设计,在分析了SSSC 和阻尼控制器的原理后,利用GWO算法优化控制器参数,结果表明,优化后的控制器起到了良好的阻尼作用,更快地使系统恢复稳定,且功率波动幅度较小。
基于以上研究,本文以STATCOM 的基本工作原理与数学模型为基础,设计了以本地测量信号作为控制器输入信号时的阻尼控制的设计方案,进而结合具有寻优功能的灰狼优化算法确定阻尼控制器的优化控制参数来提高系统的稳定性,并利用Matlab/Simulink 搭建含有STATCOM 的风电并网系统模型,验证所提方案的有效性。
2 STATCOM 基本原理与数学模型
STATCOM 作为FACTS 设备中的一员,是当今应用较多的电力电子技术。相对于SVC 而言,STATCOM 具有更好的暂态电压调节能力和动态无功支撑能力,能为系统提供瞬时无功功率[9]。从主电路组成单元的拓扑结构上,将STATCOM 分为电压型桥式结构和电流型桥式结构。其中直流侧采用电容的为电压源型逆变器,采用电感的为电流源型逆变器。由于电压源型逆变器的储能电容损耗要小得多,因此本文主要研究基于电压源型逆变电路的STATCOM。电压源型STATCOM 实际上是一个自换相的电压型三相全波桥式逆变器,接入系统可进行无功功率的补偿,从而可提高电力系统的稳定性,其简化后的接线图如图1所示。
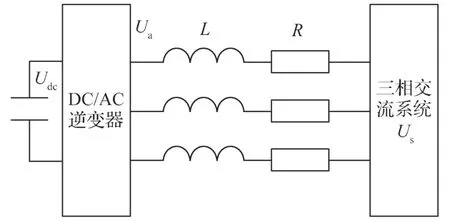
图1 电压源型STATCOM 简化接线图Fig.1 Simplified wiring diagram of voltage source STATCOM
STATCOM 的工作原理:STATCOM 在系统中可等效成一个可调电压源,通过电感和电阻或者直接通过电感并联在交流系统上,由可关断晶闸管(gate turn-off thyristor,GTO)的通断将Udc逆变成与电网同频率的相位裕幅值都可控制的交流电压,从而达到无功补偿的目的[10]。
图1中有功功率和无功功率的计算公式分别为
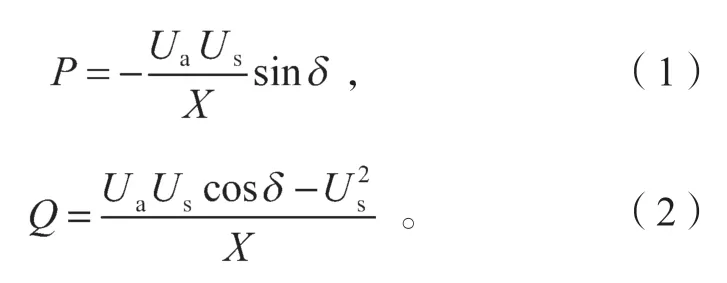
式中:P为有功功率;
Q为无功功率;
X为电抗;
Us为系统电压瞬时有效值;
Ua为STATCOM 输出电压;
δ为同步信号采样点系统静止无功补偿器输出电压的夹角。
一般地,把sinδ作近似等于0 处理,则cosδ可以近似为1。把sinδ=0 代入式(1)中,可得P=0;把cosδ=1 代入式(2)中,可得:

由式(3)可以得知,当Ua<Us时,静止同步补偿器从系统吸收感性无功功率,其工作区域为感性;当Ua>Us时,静止同步补偿器向系统输出感性无功功率,其工作区域为容性;当Ua=Us时,静止同步补偿器不与系统交换无功功率。故通过控制电压大小就可以实现静止同步补偿器与电网之间无功功率的快速连续调节。
为了便于理论分析的计算,课题组在研究STATCOM 数学模型时,采用输入输出的建模方法,且输出电压仅考虑基波分量和非周期分量。其数学模型在dq坐标系下的公式为
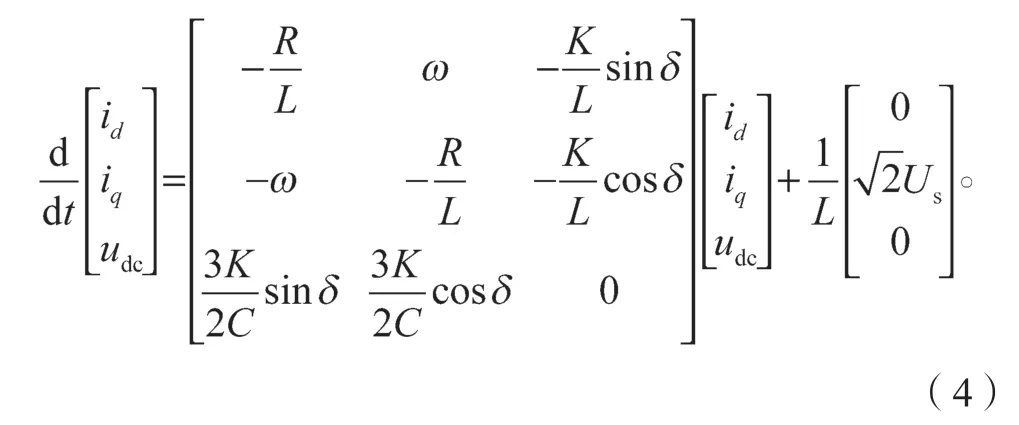
式中:K为增益比例;
ω为角频率;
C为电容;
L为线路和变压器的等效电感;
R为装置所有损耗等效电阻;
id、iq分别为dq坐标系下STATCOM 吸收的有功电流和无功电流;
udc为STATCOM 直流侧电压。
3 基于STATCOM 的阻尼控制器模型
近年来,以STATCOM 为代表的FACTS 装置逐渐被应用于改善电力系统的振荡稳定性[11]。STATCOM 双闭环控制系统如图2所示。
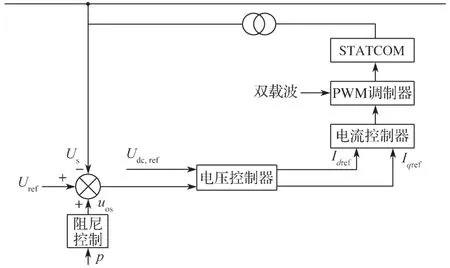
图2 STATCOM 双闭环控制系统图Fig.2 Control diagram of STATCOM
为研究STATCOM 附加阻尼控制作用对风电场暂态稳定性的作用,课题组研究STATCOM 所使用的无功补偿策略,是工程上常用的电压-电流双闭环控制方法,其中电压外环用于调整并网点的电压和STATCOM 的直流电容电压,它的输出电压作为电网电流的给定值,内部的电流控制回路产生dq电压分量,并作用于脉冲宽度调制器发出脉冲,进而控制STATCOM[12]。
STATCOM 附加阻尼控制通过引入反映系统振荡的变量来增加系统阻尼,选择合适的附加信号是提高阻尼效果的前提。基于STATCOM 的风电场附加阻尼抑制策略的输入信号有角频率误差、风电场出口电压、有功功率等[13]。由于风能的间歇性,转子角速度随风速不断变化,故课题组选取STATCOM 并入点处本地信号有功功率作为STATCOM 阻尼控制器的输入信号。阻尼控制器的传递函数为

式中:Tw为滤波器时间常数参数,根据系统的稳定性和根轨迹,Tw的取值范围一般为1~20 s,本文取Tw=3 s;
s为复频率;
T1~T4为超前滞后环节的时间常数;
Ks为系统增益系数。
阻尼控制器的结构图见图3。

图3 STATCOM 阻尼控制器结构图Fig.3 Structure diagram of STATCOM damping controller
如图3所示,首先p通过增益环节放大。然后,通过滤波器的隔直环节;最后,通过相位补偿模块,即2 级超前滞后环节,进行相位补偿,输出信号uos作为电压比较环节的附加信号,并最终被调制生成STATCOM 的Iqref。
4 基于灰狼优化算法的控制器设计
近年来,随着优化理论的发展,群体智能算法在系统优化领域掀起了研究热流。在2014年,灰狼优化算法(GWO)被提出,研究人员受到灰狼捕食猎物活动的启发,开发了一种模拟野生狼群社会性等级结构,该算法是一种仿照狼群捕猎行为的群体智能优化算法[14]。由于它具有收敛性能强、参数较少等特点,近年来受到了广泛的研究,在参数优化、图像分类等领域中取得了一定成果[15]。此算法将种群严格划分为4 个社会等级层次,种群中的个体代表了优化问题的解。α狼为种群领导者(全局最优解),等级最高;β狼(次优解)充当桥梁的作用,主要负责协助α狼进行决策,地位仅次于α狼,当整个狼群的α狼死去,β狼将接替α狼的位置。β狼会接收α狼的指令,并由它担任通知狼群其他成员的任务,狼群其他成员行动后会将信息反馈给β狼,再由β狼反馈给α狼;第三优解为δ狼,δ狼必须服从α狼和β狼;剩下为ω狼(候选解),其等级最低,主要负责种群内部关系的平衡[16]。灰狼优化算法的寻优过程就是由高等级狼指导低等级狼搜索目标的过程。
通过GWO 算法优化控制器参数,利用算法实现最优解问题,首先需要将控制器参数的调节任务用目标函数来表示一个最优问题。设目标函数为

式中:ΔP为功率偏差;
t为运行时间。
故目的是求取目标函数的最小化。Tw的取值前文已经给出,式(6)的目标函数还受到以下条件的约束:
GWO 算法的基本步骤大致可以分为如下4 个阶段。
1)初始化GWO 算法。初始化搜索因子数目(狼群规模)S=25 以及系数向量A、C和a,初始化迭代次数t=1,并令t=t+1,同时设置最大迭代次数n=50。
2)包围阶段。灰狼对猎物的围捕进行定义:
式(7)~(10)中:D为灰狼个体与猎物之间的距离;
X为当前灰狼的位置;
Xp为猎物当前的位置;
r1和r2为模在0~1 范围内的随机向量。
式(8)为灰狼位置的更新公式。向量A、C由式(9)和式(10)得出。
3)狩猎阶段。由于猎物位置(最优解)是未知的,为了模拟狩猎过程,且为了使α、β、δ狼更了解猎物位置,在t次迭代中,每次迭代的α、β、δ狼可由D来判断得出Xα、Xβ、Xδ,从而强迫其他灰狼更新自己的位置来,逐渐靠近猎物。其数学模型为
式中:Dα、Dβ、Dδ分别为α、β、δ狼与其他个体间的距离;
Xα、Xβ、Xδ分别为α、β、δ狼的当前位置;
C1、C2、C3为随机向量[17]。
通过计算各灰狼与猎物之间的距离,利用式(12)优化更新灰狼的位置。
式(12)的X1,X2,X3可由式(13)得出。
4)攻击猎物阶段。狼群通过不断更新自己的位置来逼近猎物,最后对猎物发起进攻,即迭代次数达到最大迭代次数50 时终止,输出最优解。
5 仿真验证
课题组在Matlab/Simulink 软件仿真平台上搭建了含有风电场和静止同步补偿器装置的电力系统,并以此系统验证本研究所给出方法的有效性,该系统的简化模型如图4所示。风电场的风机装机容量为9 MW,设置恒定风速为15 m/s,风电场发出的电能首先经过变压器升高到25 kV,然后经过30 km 的输电线路,线路参数如下:单位长度电阻为0.375 Ω/km;单位长度电感为2.05×10-3H/km,单位长度电容为10.55×10-9F/km;再经过120 kV 的变压器,升高为120 kV 电压等级的高压电后并入电网系统。本文中的STATCOM 安装在母线4 处,发生短路的故障处靠近母线3 处。
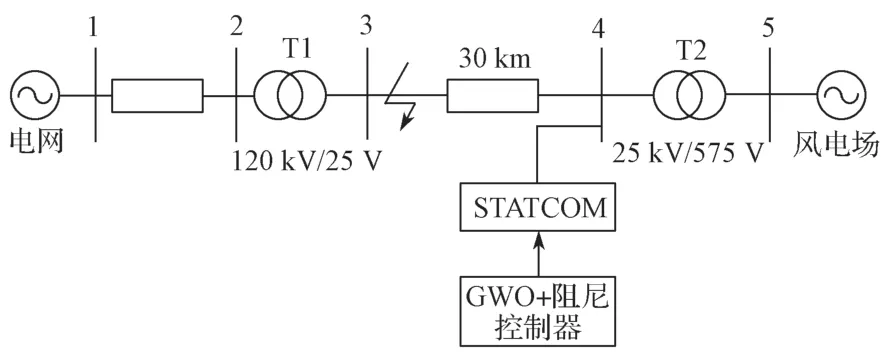
图4 含STATCOM 和风电场的系统简化模型Fig.4 Simplified model of the system with STATCOM and wind farm
为了研究经灰狼优化算法优化的阻尼控制器控制的STATCOM 对风电并网系统稳定性的影响,现设计三相短路接地的工况,设于1 s 时在靠近母线3的线路上发生三相短路接地故障,0.1 s 后故障切除。下面分别对传统控制下的系统和经灰狼优化算法优化后阻尼控制器下的系统在受到大扰动短路故障时的暂态稳定性进行分析。图5和图6分别为故障后传统控制下STATCOM 并入系统时和经GWO 算法优化后控制器下的STATCOM 并入系统时,母线4 处的电压变化情况。
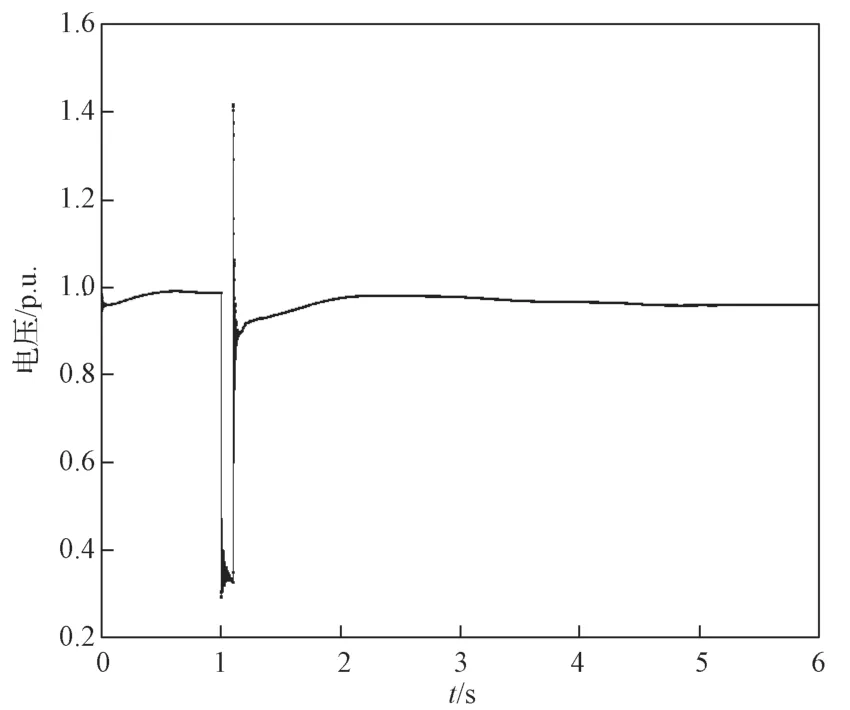
图5 传统控制下的系统母线4 处电压曲线Fig.5 Voltage at bus 4 of the system under traditional control
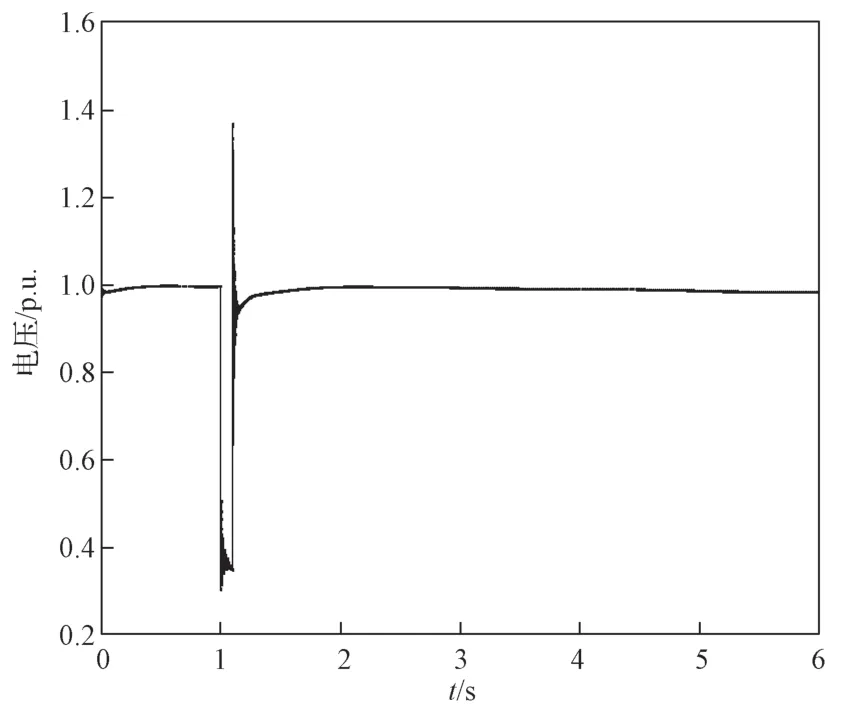
图6 经优化后系统母线4 处电压曲线Fig.6 Voltage at bus 4 of the system after optimization
从仿真图5和6 可以看出,在故障切除后,传统的控制器下系统母线4 处电压于2.1 s 左右才逐渐趋于一个稳态值,并最终稳定在0.971 p.u.附近;而采用GWO 算法优化后,STATCOM 在提供阻尼的同时有效地减少了对其电压控制的干扰,电压于1.4 s 时趋于稳定,最终稳定在0.980 p.u.附近,较传统控制器电压更快地恢复稳定,可见系统的电压质量得到了改善。
图7和图8分别为传统控制下和优化后风电并网处有功功率变化曲线。由图7和图8可知,当系统发生大扰动后,传统控制下系统风电并网处有功功率振荡明显,初始最大振荡幅值可达1.31 p.u.,约4 s 时才趋于稳定。经GWO 算法优化后的系统有功功率初始最大振荡幅值为1.27 p.u.,并于3 s 左右逐渐趋于稳定,与未优化前相比更早到达稳态且振幅较小。相比传统控制器,经GWO 算法优化设计的STATCOM 附加阻尼控制器可以更好地改善系统阻尼,抑制系统功率振荡,使功率的波动情况得到改善。
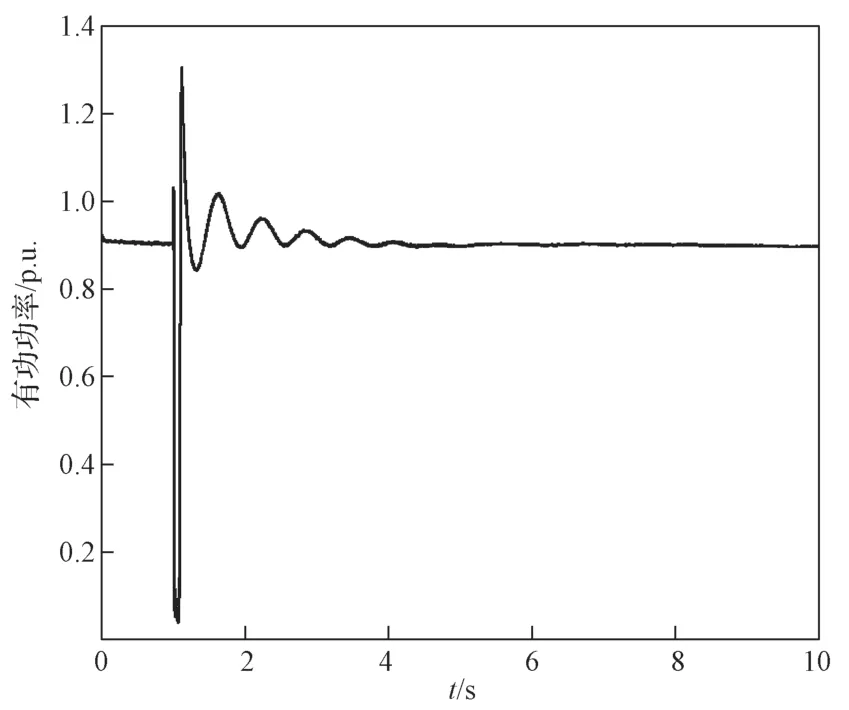
图7 传统控制下的风电并网处有功功率曲线Fig.7 Active power of wind power grid connection under traditional control
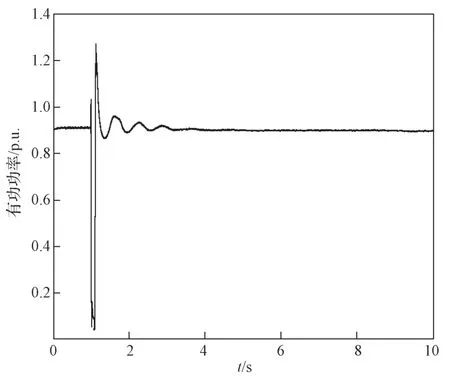
图8 优化后风电并网处有功功率曲线Fig.8 Wind power grid at the active power after optimization
6 结语
本文提出了一种基于STATCOM 提高系统阻尼特性的控制策略优化设计方案,并在Matlab/Simulink下建立基于STATCOM[18-19]的风电场模型进行验证,通过在最严重的三相接地短路故障情况下,分别对比系统优化前和优化后的母线4 处的电压和并网处有功功率的波动情况,可知本研究中所设计的方案下的系统能够更快地恢复稳态,并且改善了电压和功率波动的情况,减少了系统振荡。本文虽然针对STATCOM的控制器进行优化设计,从而改善了系统的稳定性,但是由于运行方式的改变有可能影响阻尼控制的配置点,因此,进一步考虑系统的实时性是未来的研究方向之一。
