可见光视频图像中的船舶目标自适应检测
2021-04-30张恒杨家轩周洋宇姜苗苗王毓玮
张恒 杨家轩 周洋宇 姜苗苗 王毓玮


摘要:
为降低海事监控视频图像背景中运动物体引起的杂波和噪声对船舶目标检测的影响,根据采集的可见光视频图像特性,提出一种海天背景下船舶目标自适应检测算法。将待检测图像进行预处理,使用自适应中值滤波和均值漂移(mean-shift)滤波对图像进行滤波去噪。采用密度峰聚类对传统K均值聚类算法进行改进,自适应确定初始聚类中心及其数量。对海面船舶进行自适应聚类分割。仿真实验显示:该算法的检测准确率为90.3%,验证了其准确性和可靠性;单帧视频图像的船舶目标检测用时可控制在100 ms以内,满足实时检测的要求。结果表明:该算法可以实现海天背景下船舶目标的准确、快速检测,为海上船舶目标跟踪奠定了可靠的基础。
关键词:
交通工程; 船舶目标检测;K均值聚类; 密度峰聚类; 自适应中值滤波; 均值漂移滤波
中图分类号: U675.79; TP391.4
文献标志码: A
收稿日期: 2020-04-20
修回日期: 2020-08-20
基金项目:
国家自然科学基金(51579025);辽宁省自然科学基金(20170540090)
作者简介:
张恒(1996—),男,安徽亳州人,硕士研究生,研究方向为海上运动目标检测,(E-mail)dlmuzhangheng@163.com;
杨家轩(1981—),男,山东鱼台人,副教授,博士,研究方向为海上交通信息工程,(E-mail)yangjiaxuan@dlmu.edu.cn
Adaptive detection of ship targets in visible light video images
ZHANG Henga,b, YANG Jiaxuana,b, ZHOU Yangyua,b,
JIANG Miaomiaoa,b, WANG Yuweia,b
(a.Navigation College; b.Key Laboratory of Navigation Safety Guarantee of Liaoning Province,
Dalian Maritime University, Dalian 116026, Liaoning, China)
Abstract:
In order to reduce the influence of clutter and noise caused by moving objects in the background of maritime surveillance video images on the detection of ship targets, according to the characteristics of the collected visible light video images, an adaptive detection algorithm for ship targets in the sea-sky background is proposed. The images to be detected are preprocessed, that is, the adaptive median filtering and the mean-shift filtering are used to filter the images to remove noise points. The traditionalK-means clustering
algorithm is improved by the density peak clustering, and the initial cluster centers and its number are adaptively determined. The adaptive clustering is used to segment ships on the sea. The simulation experiment shows that, the detection accuracy of the algorithm is 90.3%, which verifies its accuracy and reliability; the ship target detection time of an image can be controlled within 100 ms, which can meet the requirement of real-time detection. The results show that, the algorithm can achieve accurate and rapid detection of ship targets in the sea-sky background, and lays a reliable foundation for tracking ship targets at sea.
Key words:
traffic engineering; ship target detection; K-means clustering; density peak clustering; adaptivemedian filtering; mean-shift filtering
0 引 言
海上船舶目標检测具有重要的现实意义和应用价值。在军事上,可以保障我国领土与主权完整并促进海域的良性管理等;在民用上,可以帮助海事管理人员对进出港船舶进行管理,减少船舶事故的发生,并对船舶非法行为进行更为有效的监控。因此,精确检测海上船舶目标成为当下研究的热点。
海事监控视频可以根据摄像机安装位置的不同分为两类:一类是由裝配在非固定平台上的摄像机所拍摄的视频,主要包含海天背景,一般由天空、海面和船舶等3部分组成;另一类是由装配在固定平台上的摄像机所拍摄的视频,一般由天空、海面、沿岸物标和船舶等4部分组成。本文研究只针对在非固定平台上的摄像机采集的视频。
常用船舶目标检测算法主要分为基于背景模型的算法、基于视觉注意力模型的算法和基于边缘纹理特征的算法等3类。基于背景模型进行的船舶目标检测算法研究有:ZHOU等[1]提出一种基于傅里叶域海面背景概率的单高斯模型方法,通过模型将前景频率点与背景频率点分开;HU等[2]采用前n帧视频序列的中值构造海面背景,并进行背景的更新;杨毅等[3]扩大样本取值范围对海面背景进行建模,对输入的视频序列进行金字塔变换得到不同分辨率的图像,使用改进的Vibe算法检测出结果并进行融合。基于视觉注意力模型进行的船舶目标检测算法研究有:臧风妮等[4]先利用小波变换获取粗分辨率的低频图像,再分别采用相位谱法和梯度法获取视觉显著图,并将两者进行融合得到综合视觉显著图,最后利用小波逆变换得到原始图像的视觉显著图,实现海面目标的提取;SUN等[5]根据视觉特性选择性地分配计算资源,采用自下而上的选择性注意机制方法提高计算效率、降低分析难度;刘伟健[6]融合局部方向特征显著图与颜色特征显著图,通过阈值分割和区域生长对最终显著图进行后处理,再将灰度显著图分割成二值图,提取前景目标。基于边缘纹理特征进行的船舶目标检测算法研究有:FEFILATYEV等[7]首先进行海天线的检测,然后设定
海天线以上区域的阈值,分割船舶目标;ARSHAD等[8]使用形态学开运算和帧
差法进行背景减除,并通过对边缘信息进行形态学加粗、膨胀等操作定位船舶目标。
上述船舶目标检测算法有的计算复杂度高,有的易受海面噪声干扰,有的容易产生目标漏检情况。本文提出一种适用于海天背景下海面多船舶场景的目标检测算法,通过对海面船舶目标进行精确的自适应聚类分割,抑制海面上各种噪声的干扰,完成船舶目标检测。
1 图像预处理
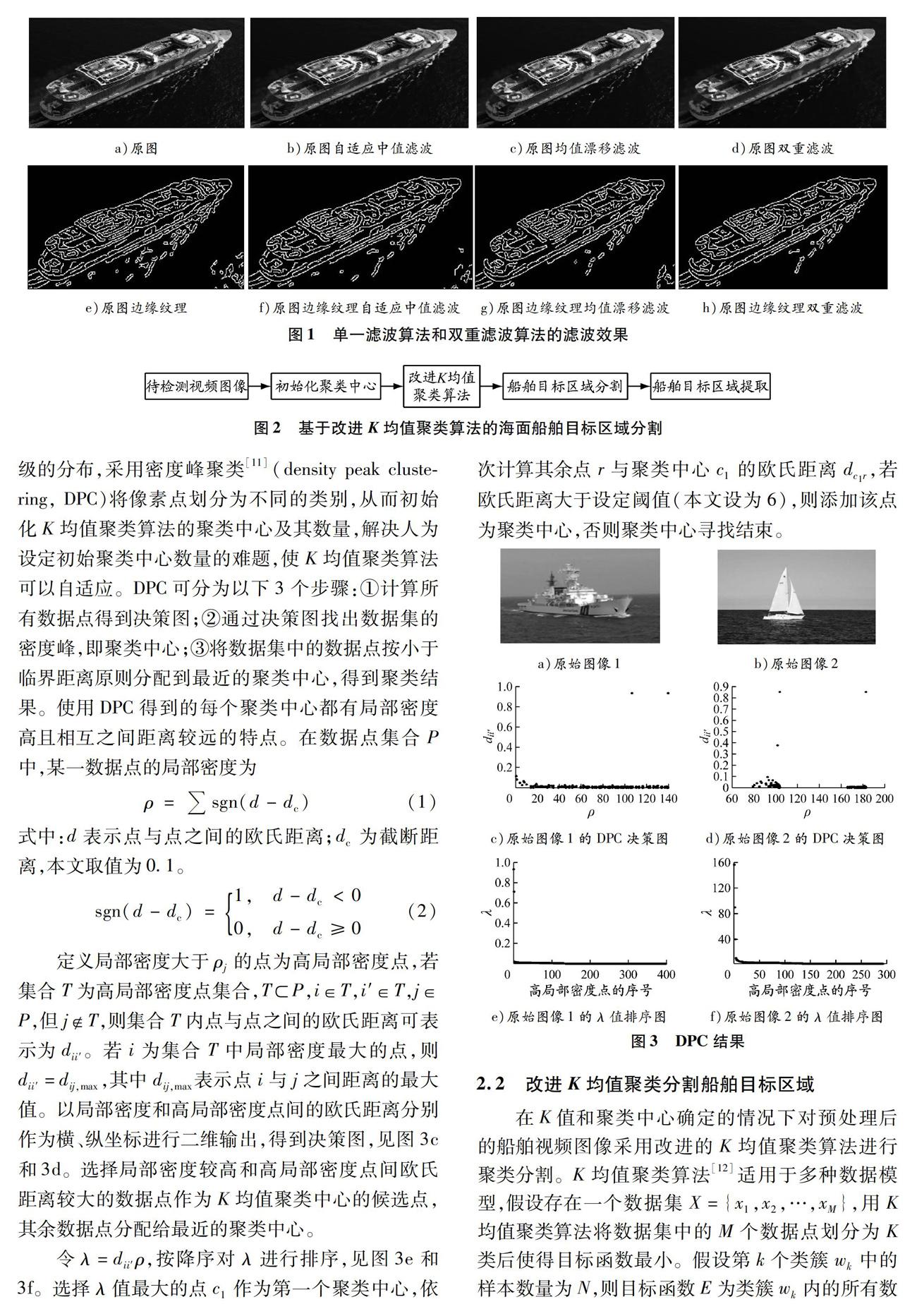
海事监控视频采集过程会受到海浪、船舶尾迹、鱼鳞光等各种噪声的干扰,因此,在进行船舶目标检测前需对视频图像进行滤波。滤波会不可避免地模糊掉图像的部分边缘细节[9],采用单一的滤波方法无法较好地保存目标边缘信息。另外,K均值聚类算法只分析图像的颜色信息,导致图像的细节部分出现很多较小的干扰。因此,对图像进行分割前需对图像进行更好的滤波保边处理,并对图像的细节部分进行平滑。鉴于此,本文将自适应中值滤波与均值漂移[10](mean-shift)滤波相结合对图像进行双重滤波处理。
双重滤波算法首先采用自适应中值滤波算法大面积地抑制噪声,然后采用均值漂移滤波算法对需保边区域的细节进行滤波。单独采用单一滤波算法在保边的同时,对海面杂波的抑制效果不够理想,见图1b、1c、1f、1g。采用双重滤波的方式对图像进行平滑,滤波效果显著优于单一算法滤波效果,见图1d、1h。
2 基于改进K均值聚类的海面船舶目标区域分割
K均值聚类算法是随机产生聚类中心的,所消耗的时间较多。同时,K均值聚类算法对初始聚类中心敏感,且需要人为预先设定聚类中心数量,容易陷入局部最优。因此,本文采用改进的K均值聚类算法对海面船舶目标区域进行分割,具体流程见图2。
2.1 初始化聚类中心
针对经过自适应中值滤波和均值漂移滤波处理
过的海事监控视频图像,通过分析其像素点灰度等级的分布,采用密度峰聚类[11]
(density peak clustering, DPC)
将像素点划分为不同的类别,从而初始化K均值聚类算法的聚类中心及其
数量,解决人为设定初始聚类中心数量的难题,使K均值聚类算法可以自适应。DPC
可分为以下3个步骤:①计算所有数据点得到决策图;②通过决策图找出数据集的密度峰,即聚类中心;③将数据集中的数据点按小于临界距离原则分配到最近的聚类中心,得到聚类结果。使用DPC得到的每个聚类中心都有局部密度高且相互之间距离较远的特点。在数据点集合P中,某一数据点的局部密度为
ρ=sgn(d-dc) (1)
式中:d表示点与点之间的欧氏距离;dc为截断距离,本文取值为0.1。
sgn(d-dc)=1,d-dc<0
0,d-dc≥0(2)
定义局部密度大于ρj的点为高局部密度点,若集合T为高局部密度点集合,TP,i∈T,i′∈T,j∈P,但jT,则集合T内点与点之间的欧氏距离可表示为dii′。若i为集合T中局部密度最大的点,则dii′=dij,max,其中dij,max表示点i与j之间距离的最大值。以局部密度和高局部密度点间的欧氏距离分别作为横、纵坐标进行二维输出,得到决策图,见图3c和3d。选择局部密度较高和高局部密度点间欧氏距离较大的数据点作为K均值聚类中心的候选点,其余数据点分配给最近的聚类中心。
令λ=dii′ρ,按降序对λ进行排序,见图3e和3f。选择λ值最大的点c1作为第一个聚类中心,依次计算其余点r与聚类中心c1的欧氏距离dc1r,若欧氏距离大于设定阈值(本文设为6),则添加该点为聚类中心,否则聚类中心寻找结束。
2.2 改进K均值聚类分割船舶目标区域
在K值和聚类中心确定的情况下对预处理后的船舶视频图像采用改进的K均值聚类算法进行聚类分割。K均值聚类算法[12]适用于多种数据模型,假设存在一个数据集X={x1,x2,…,xM},用K均值聚类算法将数据集中的M个数据点划分为K类后使得目标函数最小。假设第k个类簇wk中的样本数量为N,则目标函数E为类簇wk内的所有数据点与该类簇的聚类中心ck的欧氏距离dxnck的平方和,即
E=Kk=1Nn=1d2xnck, xn∈wk
(3)
K均值聚類算法通过迭代更新聚类中心使目标函数值最小。假设K个聚类中心分别为c1,c2,…,cK,则聚类中心更新公式为
ck=1NNn=1xn, xn∈wk(4)
改进K均值聚类算法的完整过程如下:①通过分析图像像素点灰度等级的分布,采用DPC初始化K个聚类中心及其数量;②以聚类中心为圆心,临界距离R(见式(5))为半径对所有像素点进行分配,得到新的类簇,然后计算目标函数值;③在新类簇中利用式(4)更新聚类中心;④重复步骤②和③,当目标函数满足收敛条件时,终止迭代。
R=2Mm=1Mm′=m+1dmm′M(M-1) (5)
式中:dmm′为像素点m与m′之间的欧氏距离;R表示像素点间的临界距离。
海天背景下的船舶图像一般由天空、海面和船舶组成,颜色信息相比于其他环境略显简单,且像素点灰度等级差距不大,因此采用像素点间的临界距离作为像素点分类的标准,可关联各像素点,准确寻找初始聚类中心及其数量,使像素点分类更为准确、可信。如图4c和4d为采用改进K均值聚类算法的海面船舶自适应聚类效果图,K值分别为2和3。
在确定初始聚类中心及其数量后进行K均值聚类,算法的基本过程是:在所生成的K个初始聚类中心下,将像素点集中的各个像素点按照临界距离原则分配到不同的聚类中心,再根据式(4)得到新的聚类中心。
3 实验结果分析
为验证本文算法的可靠性和有效性,选取不同海面背景的大量视频图像进行仿真,并将仿真结果与文献[4]和[5]的仿真结果进行对比。本文所采集的视频图像可从互联网或新加坡海事数据集中下载[13]。所有的仿真均是在Windows 10,Intel(R)1.8 GHz,内存8 GB的计算机上进行的,测试图像分辨率为425×282。选取500帧可见光视频图像(海天背景)作为测试样本,其中有的背景为大海浪,有的背景为小海浪,有的包含单个船舶目标,有的包含多个船舶目标,有的不含船舶目标。
海事监控视频图像是由非固定平台(如浮标、海事巡航船或者无人艇)上的摄像机拍摄的,船舶目标总处于海天背景下。选取包含大海浪、小海浪的单个或多个船舶目标的代表性图像(见图5a~5e),采用改进的K均值聚类算法对图像进行聚类,实现船舶目标在海面区域的完整分割(见图5f~5j)。在海面船舶目标区域分割过程中,受海面背景影响,小部分船舶目标被学习为海面背景,但所提取的船舶目标的整体纹理清晰,满足海面船舶目标检测的要求,如图5i所示。对船舶目标区域分割结果进行二值化处理获得船舶目标显著区域(见图5k~5o)。最后,进行船舶目标连通域的框定,得到船舶检测结果(见图5p~5t)。
本文采用自适应中值滤波与均值漂移滤波相结合的双重滤波,实现图像噪声点的抑制和边缘保留;分析滤波图像不同灰度等级的分布,采用DPC改进的K均值聚类算法对船舶图像进行聚类,对船舶目标区域进行精确分割,有效抑制大海浪背景噪声带来的干扰,避免海浪造成的误检。从检测结果来看,无论是在大海浪还是在小海浪背景下,本文算法对船舶目标区域分割准确,实现了海天背景下船舶目标的检测,如图6所示。
本文选取检测率(true precision rate, TPR)和虚警率(false precision rate, FPR)作为评价标准[13]。
RFP=NFP/(NFP+NTN)
RTP=NTP/(NTP+NFN) (8)
式中:RTP和RFP
分别表示检测率和虚警率;NFP为背景区域运动船舶未
被检测为目标的次数;NTN为背景区域运动船舶被检测为目标的次数;NTP为目标区域运动船舶被检测到的次数;NFN为目标区域运动船舶未被检测到的次数。
图7为采用文献[4]、文献[5]和本文算法对海天背景下单船舶目标和多船舶目标的检测结果对比。由图7可知:文献[4]和文献[5]采用的算法将部分天空和海面背景包围在检测框内,同时将海面背景中的一些小区域背景标记为船舶目标区域,错误地将海浪检测为船舶;在多船舶目标场景下,当待检测船舶距离较近时,文献[5]采用的检测算法将多船舶目标识别为单船舶目标;本文算法有效抑制了海浪等噪声的影响,在不同场景下船舶目标检测准确。
为验证本文算法的有效性和可靠性,在相同的仿真条件下对3种算法的检测结果进行对比。如表1所示:本文算法的检测率为90.3%,比文献[4]和文献[5]算法的检测率分别提高了25.0和18.5个百分点;本文算法的虚警率为7.2%,比文献[4]和文献[5]算法的虚警率分别降低了13.4和8.1个百分点;本文对单帧图像船舶目标检测用时控制在100 ms以内,可以满足实时检测的要求。
4 结束语
针对所采集的海事监控视频图像特性,采用改进的K均值聚类算法对海天背景下的船舶目标进行自适应检测。将待检测图像进行双重滤波,实现视频图像噪声点的抑制和边缘保留;采用密度峰聚类(DPC)改进的K均值聚类算法对船舶目标区域进行自适应分割,有效抑制不同背景下噪声带来的干扰,避免船舶误检和漏检。本文算法在100 ms以内可完成单帧图像船舶目标检测,具有较好的实时性。
虽然本文算法比深度学习等算法的目标检测准确率低,但是本文算法运行速度更快、可靠性更高,而且对硬件设备要求不高,无须事先采集大量数据进行训练,更适用于航海领域。针对传统算法目标检测准确率的不足,下一步将进行深入研究,设计开发准确率更高的船舶目标检测算法。
参考文献:
[1]ZHOUAnran, XIE Weixin, PEI Jihong ,et al. Infrared maritime target detection using a probabilistic single Gaussian model of sea clutter in Fourier domain[C]//Tenth International Symposium on Multispectral Image Processing and Pattern Recognition: Automatic Target Recognition and Navigation. SPIE, 2018: 1060804. DOI: 10.1117/12.2282649.
[2]HUW C, YANG C Y, HUANG D Y. Robust real-time ship detection and tracking for visual surveillance of cage aquaculture[J]. Journal of Visual Communication & Image Representation, 2011, 22(6): 543-556. DOI: 10.1016/j.jvcir.2011.03.009.
[3]楊毅, 邹卫军, 白云耀, 等. 基于改进Vibe的海面远距离运动目标检测[J]. 电光与控制, 2019, 26(11): 41-44. DOI: 10.3969/j.issn.1671-637X.2019.11.009.
[4]臧风妮, 李庆忠, 张洋. 一种快速自动检测海面目标算法[J]. 中国海洋大学学报, 2015, 45(4): 110-115. DOI: 10.16441/j.cnki.hdxb.20130341.
[5]SUNYuejiao, LEI Wuhu, REN Xiaodong. Remote sensing image ship target detection method based on visual attention model[C]//LIDAR Imaging Detection and Target Recognition 2017. SPIE, 2017: 106053Z. DOI: 10.1117/12.2296260.
[6]刘伟健. 基于显著性特征的海上运动目标检测[D]. 哈尔滨: 哈尔滨工程大学, 2018.
[7]FEFILATYEVS, GOLDGOF D, SHREVE M,et al. Detection and tracking of ships in open sea with rapidly moving buoy-mounted camera system[J]. Ocean Engineering, 2012, 54: 1-12. DOI: 10.1016/j.oceaneng.2012.06.028.
[8]ARSHADN, MOON K S, KIM J N. An adaptive moving ship detection and tracking based on edge information and morphological operations[C]//International Conference on Graphic and Image Processing. SPIE, 2011: 82851X. DOI: 10.1117/12.913463.
[9]王传龙. 基于无人艇的海天线与船艇小目标检测方法研究[D]. 北京: 中国舰船研究院, 2019.
[10]吴琴琴. Mean Shift算法在彩色图像滤波与分割中的应用[D]. 西安: 陕西师范大学, 2015.
[11]RODRIGUEZA, LAIO A. Clustering by fast search and find of density peaks[J].Science, 2014, 344: 1492-1496. DOI: 10.1126/science.1242072.
[12]王鹏宇, 游有鹏, 杨雪峰. 结合密度峰聚类的K均值图像分割算法[J]. 机械与电子, 2019, 37(2): 40-44.
[13]PRASADD K, RAJAN D, RACHMAWATI L,et al. Video processing from electro-optical sensors for object detection and tracking in a maritime environment: a survey[J]. IEEE Transactions on Intelligent Transportation Systems, 2017, 18(8): 1993-2016. DOI: 10.1109/TITS.2016.2634580.
(编辑 贾裙平)
