基于Arduino Uno 嵌入式系统的某型机起落架舱水平测量技术研究
2021-04-30孙建来付攀
孙建来,付攀
(航空工业西安飞机工业有限责任公司,陕西西安 710089)
飞机起落架是飞机的关键子系统,在分散着陆和滑行过程中起着至关重要的作用。在机械组装行业,尤其是飞行器装配的过程中,需要通过水平测量确定部件的水平位置,根据测量数据调整水平姿态并进行部件的定位安装[1]。
目前,我国对起落架舱的研究工作主要集中在舱门收放、起落架舱材料分析、舱门气动力学研究等方面,并未深入研究舱门水平测量领域[2]。此次基于超声波传感器与深度相机[3],设计了一套基于Arduino的起落架舱水平测量系统。
1 水平测量传感器设计
1.1 系统框架
图1 包含基于加压液体的水平测量元件,水箱下部装有水泵[4],水箱上部固定有超声波传感器与深度相机。融合两传感器信息用于感知方向的改变,并由Arduino 传输至LabVIEW。
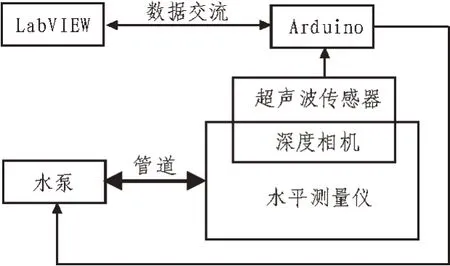
图1 自动水平测量示意图
1.1.1 Arduino Uno控制器
Arduino Uno 是基于微控制器的嵌入式开发板,其带有8 位Atmega328P 微控制器,包含2 kB 静态RAM 存储器与1 kB EEPROM 存储器。Arduino 板上有14个数字输入/输出引脚,在这14个引脚中,有6个引脚可用作脉冲宽度调制,另有6 个模拟I/O 引脚,可以通过USB 连接或外部电源为Arduino 开发板供电。
1.1.2 超声波传感器
使用的超声波传感器为HC-SR04 模块,它是一种非接触式水位测量传感器,测量范围为2 cm~4 m。当超声波碰到障碍物时,发射器发送超声波,超声波被反射回接收器并被接收器转换成电波,其工作电压为5 V,频率为40 Hz。
1.1.3 深度相机
基于RGBD 相机的深度信息,选取了实时3D 姿态估计方法,该方法对当前消费级别深度相机的不良信噪比具有鲁棒性[5]。通过学习简单的深度特征与液面变化实值参数之间的映射关系实现识别。为保证对液面的深度斑块精准识别,扩展了回归森林,并使用这些斑块来预测液面姿态,共同解决分类与回归问题。
在测量实验中,为处理传感器的特征噪声水平,通过评估几种可用于优化此类随机森林的判别力与回归精度的方案,来获得真实的训练数据集。因此,记录了不同场景下液面变化与深度信息之间的关系,并使用个性化模板跟踪每个序列来注释数据[6]。
该系统逐帧工作,不需要初始化,且可以实时运行。此次借助决策树,将多种情况下的液面测量分解为较简单的问题,可以用琐碎的预测变量解决,从而实现高度非线性的映射[7]。树中的每个节点均执行测试,测试的结果将数据样本导向子节点之一。选择节点上的测试是为了对训练数据进行聚类,以便使用简单的模型进行良好的预测。基于在训练期间到达的注释数据簇,可以将此类模型计算并存储在决策树上[8]。
基于深度图像的传感器姿态估计流程如下:
1)为了从深度图像估计传感器姿态,从图像中密集提取斑块,存储入决策树[9]。
2)节点上的测试将每个补丁一直引导到决策树叶片上,引入补丁采样中的跨步操作,以达到测算精度与实时性之间的平衡[10]。
3)为了能够处理多帧液面信息并消除异常值,执行自下而上的聚类操作:将彼此相距一定距离内的所有样本分组,并在图像中的液面周围形成较大的聚类。随后进行10 次均值平移迭代,以获得准确聚类的质心[11]。
4)从不确定性最小的那些样本中,选择剩余样本的百分比。
1.2 算法流程
使用的测量算法流程如图2 所示。
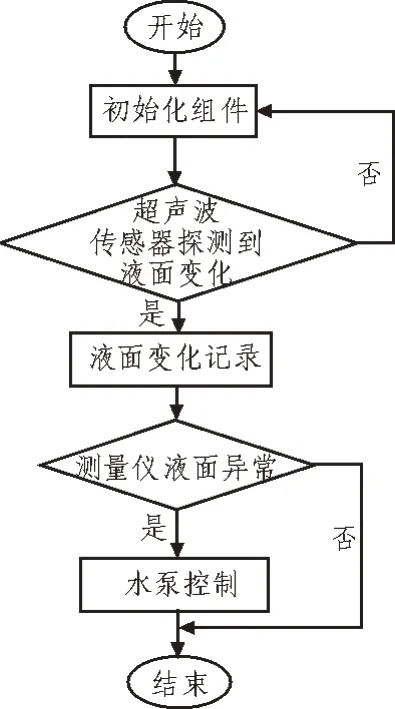
图2 测量算法流程
2 基于RFID的传感器通讯
使用建立的传感器网络,在强振动、强电磁噪音、温差大的起落架舱内准确获取并处理传感器数据,是保证水平测量仪正常工作的关键。文中选取无源性RFID 技术构建通讯网络[12]。
2.1 RFID标签与阅读器天线选取
在无源UHF RFID 系统中,最大下行链路与上行链路的工作范围Dmax,d和Dmax,u可以通过下式进行估算。
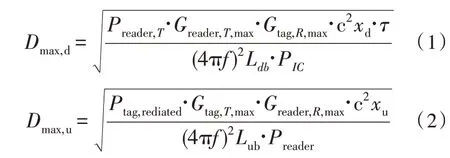
其中,Preader,T是RFID 芯片的输出功率,Greader,T,max是RFID 接收器发送天线的峰值增益,两者的乘积确定了接收器的总辐射功率[13]。Greader,R,max是读取器接收天线的峰值增益,Gtag,T,max是标签发送天线的峰值增益,而Gtag,R,max是标签接收天线的峰值增益。阅读器与标签天线的增益取决于载波频率及其相对方向。c 是光速,xd是下行链路极化失配损耗,xu是上行链路极化失配损耗,f是载波频率,Ldb是下行链路阻塞损耗,Lub是上行链路阻塞损耗,τ是标签天线与IC 之间的功率传输系数。Ptag,rediated是标签将阅读器功率反向散射到阅读器接收器的功率[14]。PIC与Preader是标签IC 和读取器接收器的灵敏度。
在未有周围反射的情况下,当阅读器天线与标签天线的峰值增益相对时,信号出现最大传输范围[15]。在单静态RFID 系统中,由于天线用于发送与接收,因此下行链路与上行链路中的阻塞和失配损耗是相同的。此外,根据天线的互易性,阅读器与标签天线的发射和接收增益也相同。
2.2 RFID标签与阅读器天线的特性研究
常见的天线与标签的最大增益或灵敏度仅是信号范围的最大值,缺少实际应用意义,且较少有制造商提供详细的辐射图。文中通过将被测标签或阅读器天线放置在距测试设备0.5~1 m 的位置,并尽可能远离附近的反射器,获得RFID 通信的实验结果。
本次实验中选取参考距离d=0.6 m,阅读器天线的增益为Greader,射频电缆的损耗为Lcble。通过围绕标签轴旋转的标签,记录每个角度来确定标签的辐射方向图,并确定每个角度的接收功率。由于安装在起落架组件上的标签面向读取器天线的概率较大,因此仅对标签天线的边缘到边缘辐射方向图进行测量。为简化每个天线3 dB 波束宽度的表示,将所有天线增益归一化为峰值增益,且所显示的值以对数标度表示。对于阅读器天线,其3 dB 波束宽度在方位角与仰角平面均大于90°。
由ETSI 法规,根据通信波束宽度,降低阅读器最大发射功率至32.15 dBm。由测量的辐射图可知,当读取标签边缘时,两个标签的增益至少降低8 dB。

利用式(3)估计Omni-ID 标签与HL 标签的最大读取范围分别估计为4 m 和7.6 m。如表1 所示,尽管不同的天线设计可能会造成部分差异,Omni-ID标签的射程主要影响因素是IC 灵敏度较低[16]。HL标签具有更窄的辐射方向图,因此HL 标签在所有起落架舱组件上会有更优的表现。此外,Omni-ID 的一个优点是既支持较低的ETSI 频段(865~868 MHz)与FCC 频段(915~921 MHz),又可以提供这两个频段的测量数据。考虑到相关法规,该方案的RFID 阅读器在高频段上传输3 dB 的功率,为了监视起落架组件,在较低的ETSI 频段(通信频段在868 MHz 与915 MHz 频段上均可运行)选取HL 标签。
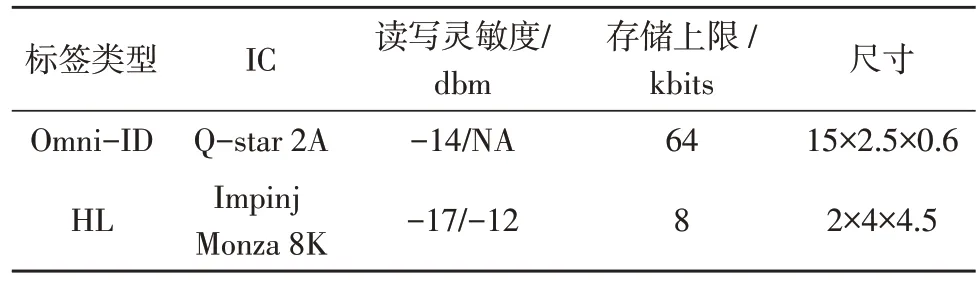
表1 RFID标签参数
基于HL 标签系统的一个重要功能是能够更新每个标签上的信息,但这要求对标签进行写操作,通常需要额外的5 dB 读卡器发射功率。
3 实验验证
为了确定系统的实际性能,考虑到需要确定机翼与飞机主体的大型金属结构对射频传播的潜在影响,因此需要一架完整的飞机进行测试。文中使用空客A320 进行系统级仿真测试,目前有大量在役的空客A320 客机,预期结果可广泛移植到其他类似尺寸的飞机上。
近年来,对于固定翼飞机通常使用Matlab/Simulink 或PX4源开发飞行控制算法,X-Plane、FlightGear、JMAVSim或Gazebo用于建立无人机模型。
出于以下原因,文中选择PX4 与Gazebo 联合仿真。
1)PX4 是一个开放源代码,其中包含众多函数库,可用于开发载具,也能同时用于飞行控制的基本控制器代码,模拟不同的飞行场景。
2)可以构建PX4,并将其上传到开放式硬件Pixhawk。
3)Gazebo 也是一种开源软件,可以提供无人机的动态模型、传感器模型与3D 可视化。
尽管PX4 与Gazebo 均具有较多优势,但仍需要对传感网络进行全面配置。首先,绘制A320 固定翼的3D CAD 模型并将其放入Gazebo 仿真软件中,将6DOF 模型以及诸如IMU 超声波传感器与摄像机之类的传感器模型集成到Gazebo 中。其次,Gazebo 连接到PX4 源代码以传达状态与控制信号。最终在C程序中实例化视觉算法,以估计用于水平测量的具体位置。
ASL 数据集的结果显示在表2 与图3 中。从结果中可以明显看出,基于超声波方法与融合传感方法的估计性能之间存在明显差异。
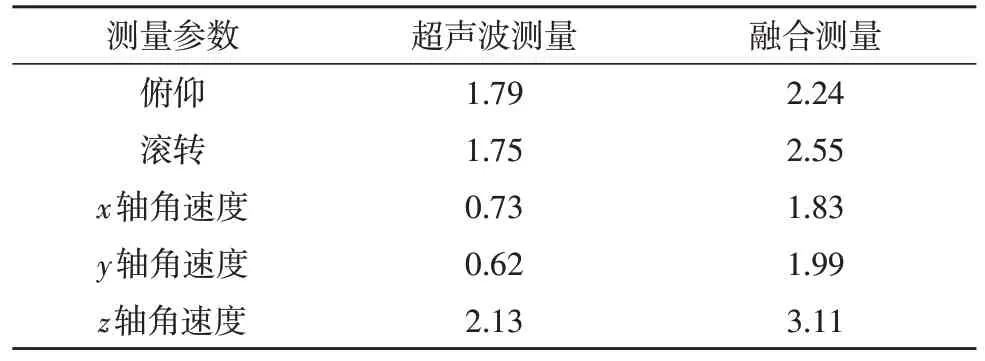
表2 两种估计法性能比较

图3 检测实验
在图3 中,校准后的超声波传感水平测量MX 直方图,如图3(b)所示;融合传感的水平测量MX 直方图如图3(a)所示,超声波传感器的主体较融合传感的主体宽。该图的形状代表起落架舱测量的误差,由表1 中列出的标准偏差进行缩放。此外,超声波传感结果存在一条长尾,表明在飞机大范围运动时误差不可消除。
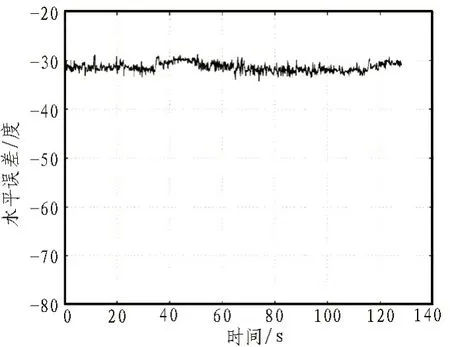
图4 水平测量

表3 水平估计结果展示
表3 与图4 列出了水平测量的实验结果。分析可知,在多种飞行状态下测量偏差平均稳定在1.6%,平均方差低于25。
4 结束语
提出非接触式起落架水平测量系统是使用LabVIEW 与Arduino 实现的,融合超声波传感器与深度相机信息,保证高振动、温差变化大的起落架舱环境下测量的准确性。未来如何改进软件算法,并提高其在不同环境下的测量准确性与可靠程度将是工作的重点。
