浅谈测地型GNSS 接收机计量校准
2021-04-29陈吉祥
陈吉祥
(福建省测绘产品质量检测中心 福建福州 350001)
1 引言
随着北斗系统完成全球组网部署,全球导航卫星系统GNSS 技术进入公众视野。目前GNSS 模块或接收机已经广泛用于测绘服务、资源调查、车船导航、交通运输、生态环保等领域的位置服务。而测地型GNSS 接收机作为其中一份子,主要应用于建筑施工、规划设计等所需高精度定位测绘业务中。按照相关规程规范的要求,测地型GNSS 接收机在使用前,必须经过计量校准,确保其该设备能够正常应用,保障测绘成果的质量。
2 GNSS 接收机校准方法与校准装置
2.1 GNSS 接收机校准方法
依据JJF 1118-2004《全球定位系统(GPS)接收机(测地型和导航型)校准规范》[1],一般外业采用静态相对定位组网测量,内业进行基线比对的方法对测地型GNSS 接收机进行校准。通过接收机在不同长度的基线点上采用不同时间段的观测、获取数据信息、经过数据后处理软件的处理,最后提取有效数据进行长度比较,依据校准规范评定规则,准确评价接收机性能、软件和精度。
2.2 GNSS 接收机校准装置
全球定位系统(GPS)接收机校准装置(计量标准代码:01217800)[2]。装置中主要的设备为按照JJF1214-2008《长度基线场校准规范》[3]建立的标准基线场,所有观测点采用强制对中观测墩。具体组成如下:
(1)接收机天线相位中心一致性校准:采用GNSS 接收机检定场超短基线场,如图1,GBW5 作为基准点摆放基准接收机,周围的8 个基线点为待校准基线点用于摆放待校准接收机,形成3~6m 的长度基线。

图1 超短基线场示意图
(2)短基线、中长基线校准:采用福州GNSS 接收机检定场如图2,由短基线边和中长基线网组成。本检定场采用基于FJCORS 网点建设,直接采用校准当天数据比较稳定的CORS 站观测数据,使待校准接收机只需在超短基线场架设,无需转场,节省架设在中长基线点的时间,提高工作效率。中长基线基准点位DZBF、DZLJ、DZCL、DZYT,与超短基线场中8个待校准基线点形成约(10~40)km 的中长基线。GB01、GB02 作为短基线校准的基准点,与待校准基线点形成(24~1736m)的长度基线。
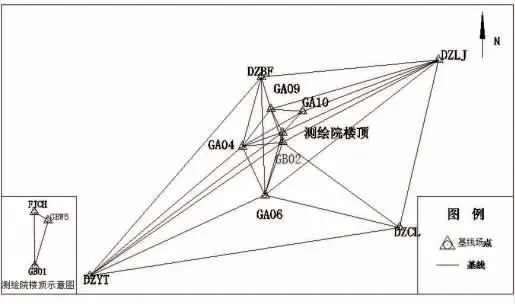
图2 福州GNSS 接收机检定场示意图
3 GNSS 接收机校准流程

图3 GNSS 接收机校准流程
3.1 作业准备
对接收机的外观、功能、电源及配件进行检查,对采样间隔、数据存储模式等参数进行设置,必要时静态观测测试,确保接收机能够正常运行并获取正确的观测数据。做好仪器出检计划,在确保校准周期的同时,尽量安排相同厂家、型号的仪器设备安排在同步时段。
3.2 外业观测
观测时段为4 个时段,时间分别为1h、1h、1h、2h。基于上述校准装置,将3 台标称精度的基准接收机分别架设在GBW5、GB01、GB02 三个基准点上,待校准机型架设在超短基线场的8 个校准点上,按照约定统一方向指向北方向。待校准机按照进行4个时段观测,切换时段时,同时统一按照顺时针方向转动90 度,共4 个方向。基准接收机无需切换时段。
3.3 数据准备及处理
(1)数据下载及转换:采用中海达HGO 数据处理软件进行GPS 观测数据解算,因待检机型厂家型号各异,解算前需将所有下载的观测文件转换成标准RINEX 格式。
(2)CORS 站数据筛选:因4 个CORS 站位置相距较远,观测条件可能受气象原因影响较大,需对数据进行筛选截取。根据基线残差时序图,如图4,查看所跟踪卫星数据的连续性、周跳等情况,从截取的同步时段数据中挑选1 个最稳定的站点数据参与基线解算。

图4 基线残差序列图
(3)基线解算统计:在HGO 数据处理软件中对图5 所列相关的基线进行解算。计算参照GB/T 18314-2009《全球定位系统(GPS)测量规范》[4]
(4)统计表观测值选取及结果统计:
天线相位中心一致性,采用待检机架设基线点与GBW5 基准点全部4 个时段基线解算值,统计结果取最大值与最小值之差。短基线含2 段数据,分别为待检机架设基线点与GB01、GB02 所构成的基线,每段观测值采用4 个时段基线解算值的平均值。统计结果取与标准基线值之差的平均值。中长基线1段,采用4 个时段计算值平均值,统计结果取该值与标准基线值之差。

图5 基线值解算统计表
3.4 出具校准证书
将图5 所示的计算结果录入到仪检项目管理系统中,形成待校准接收机的校准证书。
4 校准工作相关的问题思考
4.1 测量不确定度评定
参照JJF1118-2004[1]附录B 所示的接收机定位误差的测量不确定度分析方法,不确定度的来源主要来自校准装置与接收机。鉴于接收机的分辨率目前都在毫米级,该不确定度分量评定影响较小。但由于基线长度与基线段精度均不相同,需分别评定测量扩展不确定度。建议引入的如下分量,使测量不确定度值与校准结果一一对应,更加直观。
(1)由标准校准基线引入的不确定度分量u1,分别对超短基线、短基线、中长基线计算不确定度分量。
(2)由接收机安置误差引入的不确定度分量u2。
(3)由短基线重复性测量给出的不确定度。校准网型涉及到长短边的问题,在重复性试验中,超短基线、中长基线采用规范规定的进度指标,不重复带入测量不确定度的计算。重复观测数据为4 组,按照JJF1059.1-2012《测量不确定度评定与表示》[5]中极差法的计算公式与极差系数评定该分量。
(4)评定的频率:相同标称精度的接收机校准可采用同样的不确定度分量,降低测量不确定度的评定工作量,提高校准效率。
4.2 基线是否需要进行平差
目前国内大多采用基线长度比对的方法进行校准,无需进行组网平差。平差可以理解为一个将误差均摊的过程,不易反映某台接收机的校准结果。
4.3 基线解算软件的选取
日常可使用中海达HGO 数据处理软件,该软件残差序列图包含卫星数据情况图与时序表,编辑较为方便直观。由于各厂家接收机内部结构及数据接收、存储方式、格式存在差异,当判断某台接收机数据不符合要求时,应采用该品牌专用的数据处理软件再计算一遍,对结果进行核实,确保校准评价的正确性。
4.4 校准值的使用
校准值与标称误差、外业测量误差这三者概念完全不同,校准值反应的只是该仪器在校准时的状态,数据符合时表明该设备正常可用,不能替代使用。
5 结束语
GNSS 接收机校准工作应根据不同厂家、型号类型仪器的特点,制定完备的内外业计划,确保校准流程各个环节工作有序进行。以上为笔者长期从事测绘仪器计量检校工作,对GNSS 接收机校准工作的标准装置使用、校准方法及流程的总结,以及校准工作的一点思考,便于共同交流学习。