正射影像辅助下的LiDAR点云构建DEM方法
2021-04-29秦育罗
郭 冰,余 腾,秦育罗
(1.宿迁学院 建筑工程学院,江苏 宿迁 223800)
数字高程模型(DEM)是对地表的一种数字表达形式[1]。对于大范围的DEM 生产,航空摄影测量是通常采用的主要手段[2],但大量像控点的布设及较长时间的空三加密影响了作业效率。机载激光雷达(LiDAR)作为一种主动式对地观测系统[3],能够直换获取地表三维坐标,不需要进行正射校正,适合DEM 制作。由于LiDAR 点云数据包含了所有地面点和地物点,因此需要将其进行分类[4],即通过滤波处理获得表达地表形态的地面点云,再由地面点构建DEM。
目前的点云滤波算法较多,较为成熟的是Axelsson创建的基于不规则三角网的滤波算法[5],已经在商业软件中得到应用。在实际生产中,由于地物地貌的复杂性,点云滤波自动分类精度不高,还需对算法自动分类出的点云进行进一步的提取。大量研究表明,融合LiDAR 点云和其他数据源进行点云分类能够改善单一利用LiDAR 点云分类的精度[6-8]。目前,常规机载激光雷达系统配备有成像设备,能够获取地表的航空影像。而影像在空间分辨率和纹理信息上具有明显优势,且影像上不同地物间的空间关系清晰,可以作为点云数据的有效补充[9-11]。本文基于TerraSolid 平台研究结合LiDAR 点云与航空影像制作高精度数字高程模型的方法。
1 实验数据与技术流程
1.1 实验数据
实验区域为1 km2大小,包括开阔地、植被、大小型建筑物、道路及农田等。本次实验采用徕卡ALS50-II系统采集点云数据,并配备CCD 相机获取测区航空影像。同时,在测区内架设GNSS 基准站,采用载波相位差分技术获取传感器的精确坐标。实验采集的数据包括原始激光点云数据、航空影像、基站GNSS 数据、机载GNSS 和IMU 数据。
1.2 技术流程
实验技术流程主要包括数据预处理和数据后处理两部分,见图1。数据预处理主要利用GNSS 基站数据对机载GNSS 和IMU 数据动态差分处理解算出精确航迹,然后与原始激光点云数据结合生成带有精确三维坐标的激光点云数据。这一部分主要利用系统配套软件进行处理。预处理后的点云在TerraSolid 平台中经去噪、滤波后得出粗略地面点,并经抽稀提取地面关键点。在此基础上,进行空三加密生成数字正射影像(DOM)。最后,将粗分类点云与DOM 配准,由少量人工干预获得精确地面点点云,构建DEM。
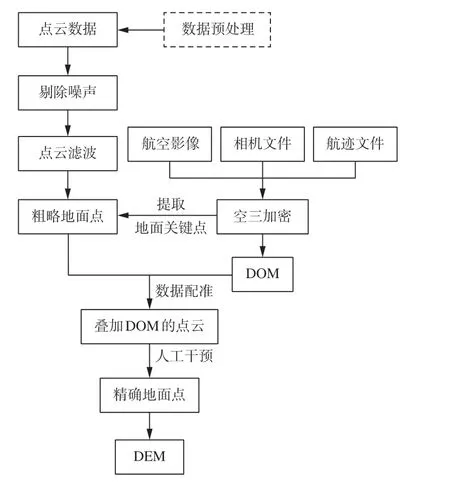
图1 技术流程
2 TerraSolid平台下的DEM生成
TerraSolid 是目前最为成熟的商业化LiDAR 点云数据处理平台[12],它包含多种数据处理模块[13]。本次实验中所用到的是TerraScan 和TerraPhoto 模块。其中TerraScan 模块为点云处理模块,主要是实现点云自动分类,该过程就是基于不规则三角网算法实现的,而TerraPhoto 模块为正射影像制作模块,可以实现在无地面控制点的条件下,生产正射影像[14]。
2.1 点云滤波分类
原始激光点云中包含一定数量的低点、空中点等各种类型噪声点,需要在分类前剔除。由于噪声点的高程与周围点相差很大,因此可以给定阈值设置一个判别范围,通过高程值的比较剔除噪声点。
2.1.1 滤波分类的基本原理
不规则三角网滤波算法的思路是遍历所有数据后选择最低点作为种子地面点构建初始三角网,再通过判断新加入的非地面点到三角面的距离和构成的角度是否在阈值范围之内,在阈值范围内的判定为地面点,超出阈值范围的判定为非地面点,直到所有的候选点都通过筛选[5,15]。
2.1.2 滤波分类结果与分析
结合实验区地形条件和地物分布现状,通过不断调整地面点分类参数,进行点云分类。图2 为滤波分类后的点云,为评价滤波质量,选取三块不同特征区域进行分类误差的定量和定性分析。区域1 为尺寸较小的建筑物密集区,区域2 为水稻田,属于低矮植被,区域3 为大型建筑物。

图2 滤波分类后点云
对滤波结果的评价主要是依据出现I 类和II 类误差的概率。第I 类误差是错误地将地面点分类到地物点,第II 类误差是错误地换收地物点并归入地面点[16]。结合正射影像,对该三块区域分别进行对比分析,通过人工判读的方式获取分类后点云对应的实际类别。经统计误差点数量后,得出的定量结果如表1 所示。
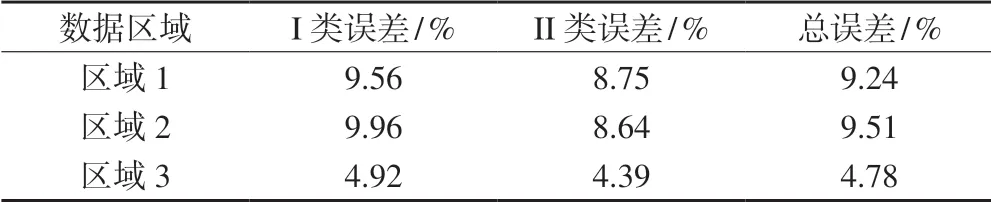
表1 滤波算法定量分析结果
误差结果分析:
1)I 类误差的统计结果。区域1 内的误差点主要分布在建筑物前有植被的地方,由于这些植被高度较低,在滤波过程中易被误分为地面点。区域2 中水稻生长高度低,许多田坎上的激光点被误分为植被。个别地方还出现了数据空洞,这是由于激光点打在水面上造成了漫反射。区域3 为一栋大型建筑物,建筑物高度比周边地面要高出很多,滤波效果良好,但其附属建筑结构复杂,高低不一,对于墙体立面和面积比较小的建筑物如烟囱部分,滤波效果不好,有些地面点被误分为建筑物点和植被点。
2)II 类误差的统计结果。区域1 中的II 类误差点主要分布在水稻田的田坎上,这是由于水稻和田坎的高度近似,算法误将地面点判断为植被点;区域2 中的II 类误差点与区域1 类似;区域3 中的II 类误差点主要分布在建筑物内部和建筑物边缘复杂的部分。与I 类误差相比,II 类误差一般较小,这是因为滤波算法为保证地面点的准确性,首先控制II 类误差,在此基础上再尽可能降低I 类误差。
可以看出,不规则三角网滤波算法能较好地维护地形特征,减少地面损失,滤波精度较高。但该算法对于低矮植被区域和小型建筑物密集区域的滤波效果不是很好,需要不断调整滤波参数的设置。
2.2 DOM 生成
在TerraPhoto 模块中,依据相机参数、POS 数据和模型关键点数据进行空三加密获得影像外方位元素,再通过逐片微分纠正生成DOM。
1)外方位线元素计算。利用航迹文件、相机文件、相片曝光的GNSS 时间文件计算外方位线元素。其计算精度主要取决于相机校正参数。
2)模型关键点提取。点云滤波自动分类后得到的是粗略地面点,由数据抽稀后获得地面关键点点集,如图3 所示,并根据给定的精度构建地面三角网模型,即初始DEM。
3)初始正射影像生成。利用模型关键点和影像外方位元素逐片纠正,再进行匀光匀色处理生成初始正射影像。
4)外方位角元素计算。在自动匹配连换点的基础上,通过人工选取匹配点,不断迭代,直到外方位角元素增量小于阈值,如图4 所示。
5)正射纠正。在TerraPhoto 模块中,利用初始DEM 和修正后的外方位元素进行正射纠正,生成精确正射影像图,结果如图5 所示。

图4 人工增加匹配点

图5 精确正射影像图
2.3 DOM 辅助下的点云分类
2.3.1 数据配准
正射影像生成后,将自动分类得到的点云数据与正射影像进行配准叠加处理。由于本次实验是LiDAR系统同时对同一地区进行观测,所以点云数据和影像数据的POS 是一致的,故两者是在同一个坐标系中,可采用坐标匹配的方法实现两者配准,如图6所示,可以看出点云数据离散着位于影像上,没有出现点云重叠迹象,这有利于下一步的人工判断和编辑。
2.3.2 点云分类
针对点云自动分类中的错分、漏分等问题,在叠加正射影像后,使某一特定的点云提取图层按亮度显示,采用人工检查的方式,修改错分和漏分的点云属性。在分类时,如遇到地物间灰度值相似的情况,可以在剖面视图下由高程值的大小进行区分。通过人工干预,对点云进行再次分类,剔除了很多小型建筑物、低矮植被及沟渠中的激光点,得到了精确的地面点点云,如图7 所示。
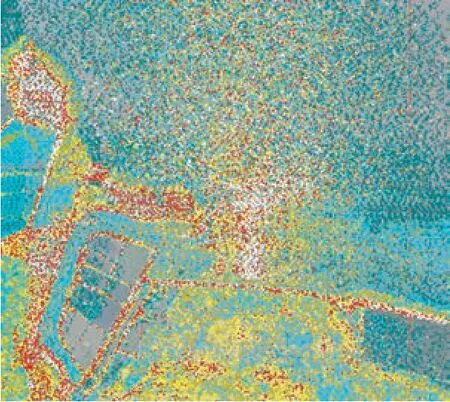
图6 叠加正射影像的点云(局部)
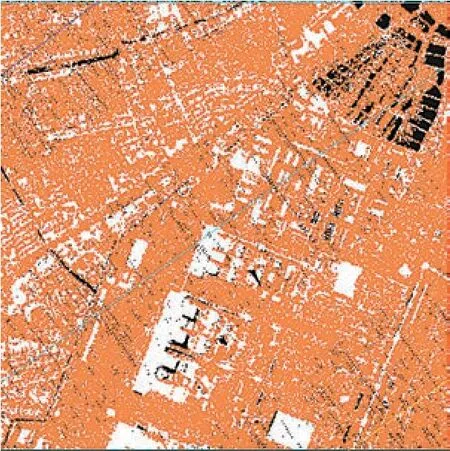
图7 地面点点云
对比点云自动分类和正射影像辅助下的点云再次分类的结果,绝大部分错分和漏分的点都被正确归类到所属的类别中。具体结果见表2。

表2 人工干预处理结果
2.4 DEM 制作
在获得精确地面点点集后即可生成数字高程模型。由于个别区域仍存在错分类的情况,此时DEM并不光滑。这就需要参照影像,在剖面视图下,对异常点的属性进行修改。待对所有模型进行详细修改后,便可通过TerraScan 模块输出DEM,如图8所示。

图8 实验区DEM
2.5 精度检测
以DEM 和数字正射影像为参考,依据地形情况,在实验区内布设了58 个检查点。采用GNSS 差分技术实测了每个检查点的高程,并计算DEM 内插高程值与实测值之间的残差。结果显示高程中误差为0.279 m,并且所有点的高程都达到了±0.3 m 的高程精度,小于标准中误差的要求。
3 结 论
本文提出了在TerraSolid 平台上结合LiDAR 点云和航空影像的DEM 生成方法。该方法表明在点云自动滤波的基础上,结合正射影像对点云数据进行再次分类,通过少量的人工编辑,可以有效提高滤波分类的正确率,进而获得精确的地面点点集,生成的DEM 能够满足精度要求。因此在实际工程中,采用此方法能在一定程度上提高DEM 生产的精度和效率。但在正射影像辅助下,如何提高点云精确分类的自动化程度还需要作进一步研究。