动力定位钻井平台快速降载策略
2021-04-28国世乾温庆明
盛 利 国世乾 温庆明
(1.广州海洋地质调查局 广州510095;2.中国船舶及海洋工程设计研究院 上海200011)
引 言
动力定位钻井平台在作业过程中往往有管线或者电缆与海底的设备相连,平台位置的保持尤为重要。在作业过程中可能会出现主配电板母联开关、发电机开关故障跳闸,发电机意外急停等情况,这些故障将造成其他在线的发电机负荷突加、频率下降甚至过载,极端情况下可导致局部或全船断电,推进器失去动力,平台失位等严重后果。本文重点讨论在发电机发生负荷突加且超过其响应能力时,如何快速降低电网负荷,避免发电机过载和频率过低,保证电站平稳安全运行。
动力定位(DP)船舶或平台通常配有功率管理系统(PMS),其中集成了功率限制功能,PMS根据开关状态、电网容量、消耗功率、电网频率和负载优先级等参数计算各负载的可用功率并发送给负载,负载根据分配的可用功率来限制自己的负荷。由于传感器响应时间,控制器执行周期,通信延迟等因素的限制,PMS可用功率更新的时间通常在0.5 s左右。为了弥补PMS对突加负载响应速度过慢的缺点,在推进器和钻井变频器控制系统采用了独立于PMS的功率限制措施。该措施通过监控频率的变化,快速限制功率输出,大大提高了响应速度。不过,只有当频率降低到设定点才会启动减载功能,响应时间相对滞后,因此仍会导致电网频率波动较大。
随着数字化智能电子设备(IED)及IEC61850通信标准在DP平台的配电、驱动系统中得到广泛应用,使得基于事件的故障减载成为可能,该方案在钻井和推进器变频器控制系统中使用基于事件的功率限制功能代替基于频率的功率限制。变频器控制器通过GOOSE报文实时获取配电板相关的信息,通过这些信息综合判断是否要需要减载以及减载的大小,且在故障发生时立刻执行,不必等待频率下降到一定程度才开始减载,从而大大缩短故障响应时间,弥补PMS的不足,减小电网频率波动范围,提高电网的稳定性、可靠性。本文将探讨基于功率的负载限制、基于频率的负载限制以及基于事件触发的负载限制并对其进行比较,从而突出基于事件触发的负载限制的优点。
1 功率管理系统(PMS)的功率限制功能
1.1 动力定位半潜式钻井平台的电站结构
图1为半潜式DP钻井平台典型的电力系统配置图,为了满足DP等级要求,电站被分割为几个相对独立的子系统。包括8台发电机和4块主配电板。负载主要包括8台推进器和2台钻井变频器,每块主配电板连接2台推进器,2台钻井变频器分别由1和4号配电板供电。4块主配电板之间由母联开关互联,通过母联开关的闭合,电站可以运行在4段模式、2段模式、1段模式或者环网模式。
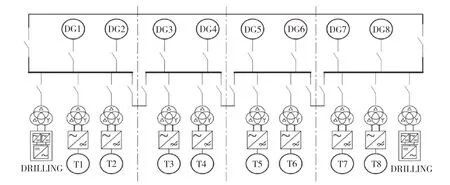
图1 半潜式DP钻井平台电力系统图
1.2 发电机在突加负荷时候的频率响应
柴油发电机通常能够容许的最大负荷突加量约为额定负荷的33%,这是由于增压器、燃油供给阀门、油门拉杆以及调速器等一系列环节的限制因素导致发电机响应速度滞后。负荷的突加过程中将会导致发电机的频率和电压降低。其中频率下降幅度主要取决于发电机的惯性时间常数以及柴油发电机突加负荷量。
发电机在突加负荷时频率响应曲线见图2。

图2 发电机在突加负荷时频率响应曲线
如图2所示,当发电机发生故障跳闸时,故障发电机的负荷将转移到其他在线的发电机上,在没有任何减载措施的情况下,在线发电机频率将由于负荷突加而快速下降直到欠频保护设定值以下,继电保护发出开关分闸指令,导致该段主配电板断电。除频率下降外,还可能导致发电机过载。为了避免这种情况发生,需要采取快速降低负荷的措施,在这种情况发生时能够快速降低电网负荷。
1.3 PMS基于功率的负载限制
PMS集成了功率限制功能,通过限制负载的最大输出功率来实现。钻井平台的主要负荷为推进器和钻井设备,一般都采用变频驱动,能够灵活、快速的控制负荷变化。PMS根据负载的优先级为其分配可用功率,优先级别取决于设备重要程度,钻井平台上,推进器的优先级别高于钻井设备。当电站可提供的功率能够满足所有负载要求时,功率限制功能不会起作用;只有当电网功率不能满足所有负载要求时,功率管理系统将首先降低钻井系统的负荷,如果还是不能满足要求,则将进一步降低推进器的负荷。
PMS由通信或者输入输出(I/O)实时获取电网开关状态、负载大小以及电网容量等信息,结合负载设定的优先级来计算推进器和钻井设备的可用功率,并将其发送至推进器和钻井变频器中。变频器控制系统比较已用的功率和可用的功率,如果已用功率超过PMS计算的可用功率,变频器将开始降低器负荷。下面是PMS一般采用的计算方法:

P
为负载可增加的功率,kW;K
为负载的权重;K
为本段配电板上可用功率百分比;K
为互联配电板可用功率比;Q
为负载优先级;P
为本段配电板容量,kVA;P
为本段配电板已用功率,kW;P
为互联段配电板可用功率,kW。P
为互联段配电板已用功率,kW。1.4 PMS基于事件触发的负载限制
PMS根据发电机功率和负载消耗功率来计算,此过程在控制器中周期性执行。通常情况下,当发生意外跳闸时,并不能立刻根据新的电网状态计算负载可用功率。为此,PMS中采用了基于事件的减载功能。当发电机开关或者母联开关发生故障跳闸时,将触发信号;该信号由通信或者I/O传输到PMS,PMS立刻更新电站的配置,重新计算负载可用功率,并将更新后的值通过总线或I/O发送到负载,从而实现更快的减载响应。

图3 PMS基于功率的减载响应时间
1.5 PMS基于频率的负载限制
PMS还通过监测频率来限制负荷。系统设定最小频率,当频率测量值低于该值时,所有负载都降低负荷,并根据频率测量值与设定值的偏差量采用PI调节器来计算所需减载量。


无论是基于功率、事件,或是基于频率的功率限制,PMS都是通过计算功率分配值来实现的。在意外跳闸而导致负载突加时,PMS能够更新负载可用功率并限制推进器的负荷,但是由于PMS响应时间慢,不能很好地适应这种情况。
为了实现快速减载,PMS还具备负载的优先脱扣功能,当电网过载时,PMS能立即将不重要的负载脱开,从而达到快速降低负荷的目的。然而在钻井船或者平台上主要的负载是推进器和钻井设备,可以脱开的负载往往局限于空调,生活设备等,他们所占的比例很小并不能达到降低负荷的目的。
2 动力定位控制系统功率限制功能
除PMS外,动力定位控系统有自己的功率限制功能。当某段配电板上的负荷超过DP系统中的设定值时,DP功率限制功能将限制推进器的输出功率。另外,DP系统还可根据外界环境变化预测所需的负荷,当其估计的负载超过功率设定值时,动力定位系统将控制推进器进行减载,参见图4。

图4 动力定位控制系统的功率限制
DP控制系统的功率限制是对PMS功率限制功能的补充,其功率限制设定值通常小于PMS中的设定值。然而,DP系统的功率限制功能是基于PMS计算可用功率的基础上,其响应速度约为1 s,不能适应负载突加的情况。
3 变频器基于频率的功率限制功能
如前所述,PMS和DP系统的功率限制功能由于响应时间的限制,不能很好地满足快速减载要求,为此在重要负载变频器控制系统中采用了独立的基于频率的功率限制功能作为PMS的后备系统。为了实现对发电机突加负载的快速响应,电网频率被用来显示发电机过载的状态。变频器通过频率测量模块获得电网的频率,频率测量模块与中压配电板的电压互感器相连,其响应时间小于20 ms,当推进器变频器控制系统监测到电网频率低于某个设定门槛值时,将启动快速减载功能。推进器基于频率的响应曲线如下页图5所示。

图5 推进器基于频率的响应曲线
当频率高于57 Hz时或者频率值低于40 Hz时(认为传感器故障)功率限制功能将不起作用。当频率在40~54 Hz之间时,推进器允许的输出功率为0。当频率在54~57 Hz之间时,功率限制对应为0%~100%的线性区间。由此可见,只有当频率降低到一定范围时,基于频率的功率限制功能才开始工作。
另外,如图6所示,从发电机故障分闸信号发出直至变频器完成减载控制,约需300 ms,因此对故障响应是滞后的,仍然会造成电网较大的波动。
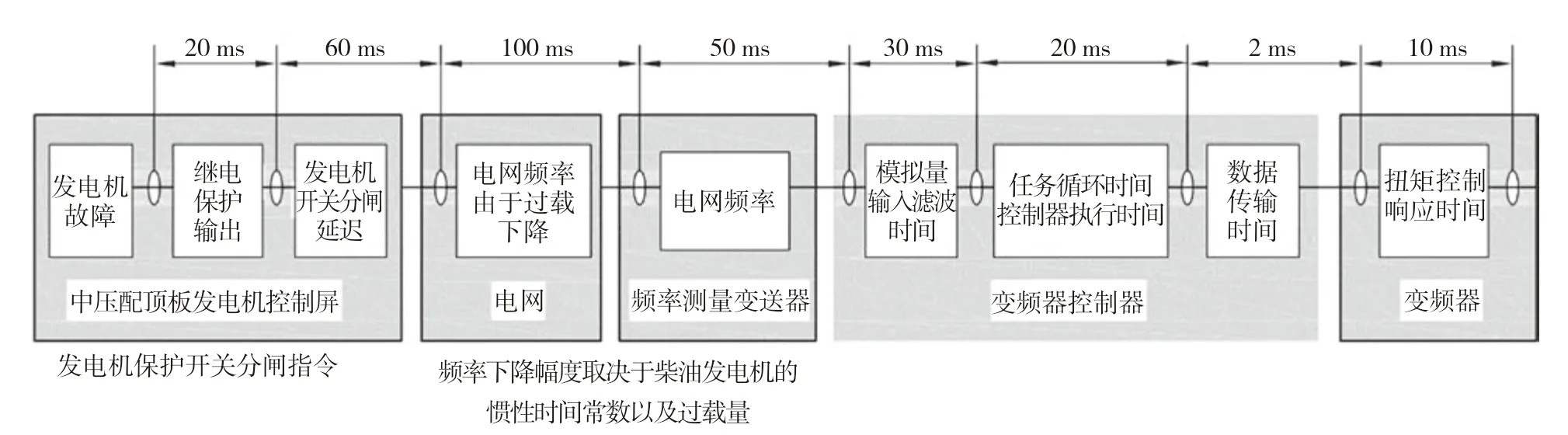
图6 变频器基于频率的减载时间延迟
4 变频器基于事件的功率限制功能
近年来采用IEC61850通信标准的数字化配电设备在DP钻井平台及其他船舶上得到广泛应用,如Siemens和ABB都有支持IEC61850的继电保护产品。IEC61850-7-2 标准定义的GOOSE服务模型,能够实现在采用IEC61850标准的数字化设备之间进行实时、可靠的数据传输,使基于事件的快速减载方案得以实现。这种基于事件的快速负荷减载功能独立于PMS系统,由主要负载各自的变频器控制系统独立完成。如图7所示,发电机开关、母联开关的智能继电保护模块与变频器控制器分别通过IEC61850通信网络互联。变频器控制器通过GOOSE报文快速实时获取所有开关状态信息和功率,周期约20 ms。
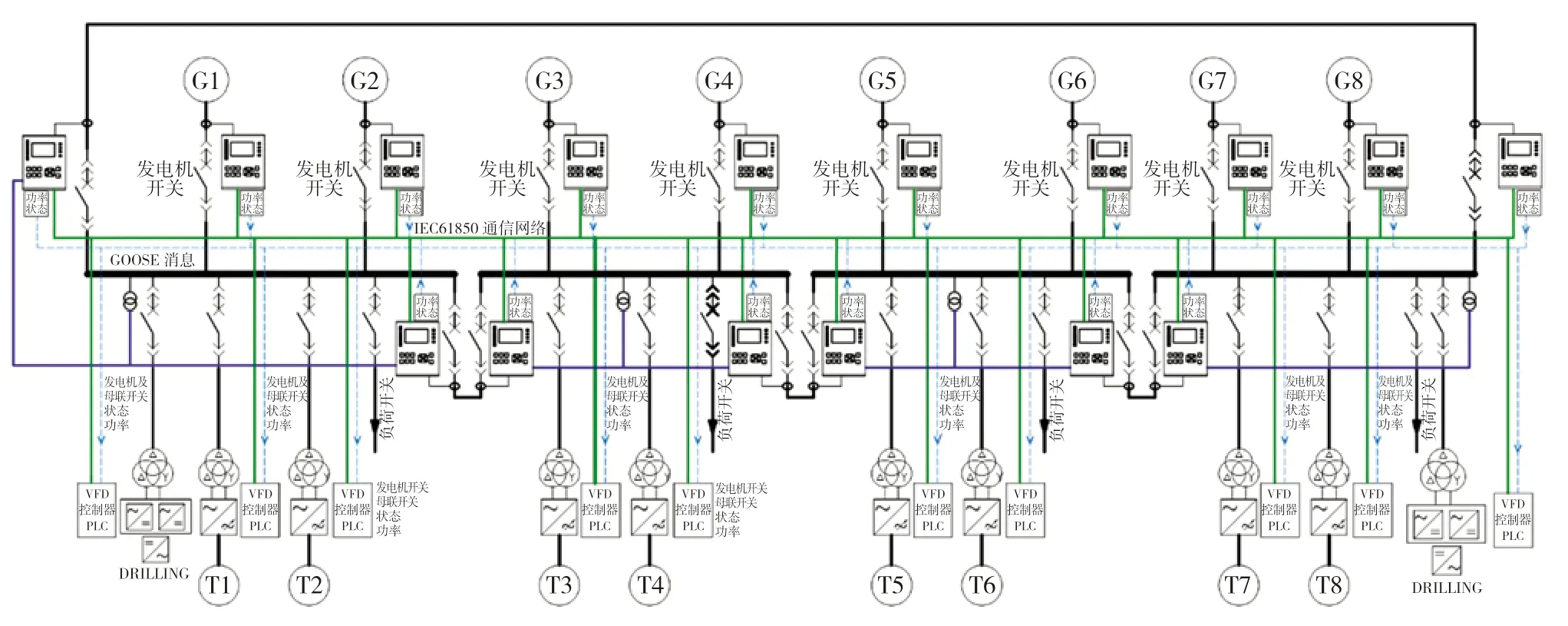
图7 中压配电板与变频器之间的通信和信号传输
推进器和钻井变频器控制系统通过GOOSE报文通讯获取的开关状态、电网配置情况、实时功率大小等相关信息,并根据这些信息来判断发电机开关或者母联开关的分断是否会导致在网的发电机过载,如图8所示。

图8 基于事件的故障减载原理
当发电机故障跳闸时,发电机继电保护发出跳闸指令到开关,该跳闸指令同时被传送到变频器控制器中,变频器控制器将基于主配电板当前的负荷来判断该开关分断是否导致其他在网发电机负载突加超限或者过载。若经过判断结果为“是”,则变频器控制系统将计算需要减载的负荷大小,并根据计算的结果更新推进器扭矩指令的上限值,同时发送至变频器,变频器将根据扭矩限制指令降低扭矩和输出功率,从而实现快速减载。GOOSE通信基础上的基于事件的负荷减载速度很快,如图9所示,通常在50 ms左右完成,因此可有效避免发电机过载或者频率下降超限。
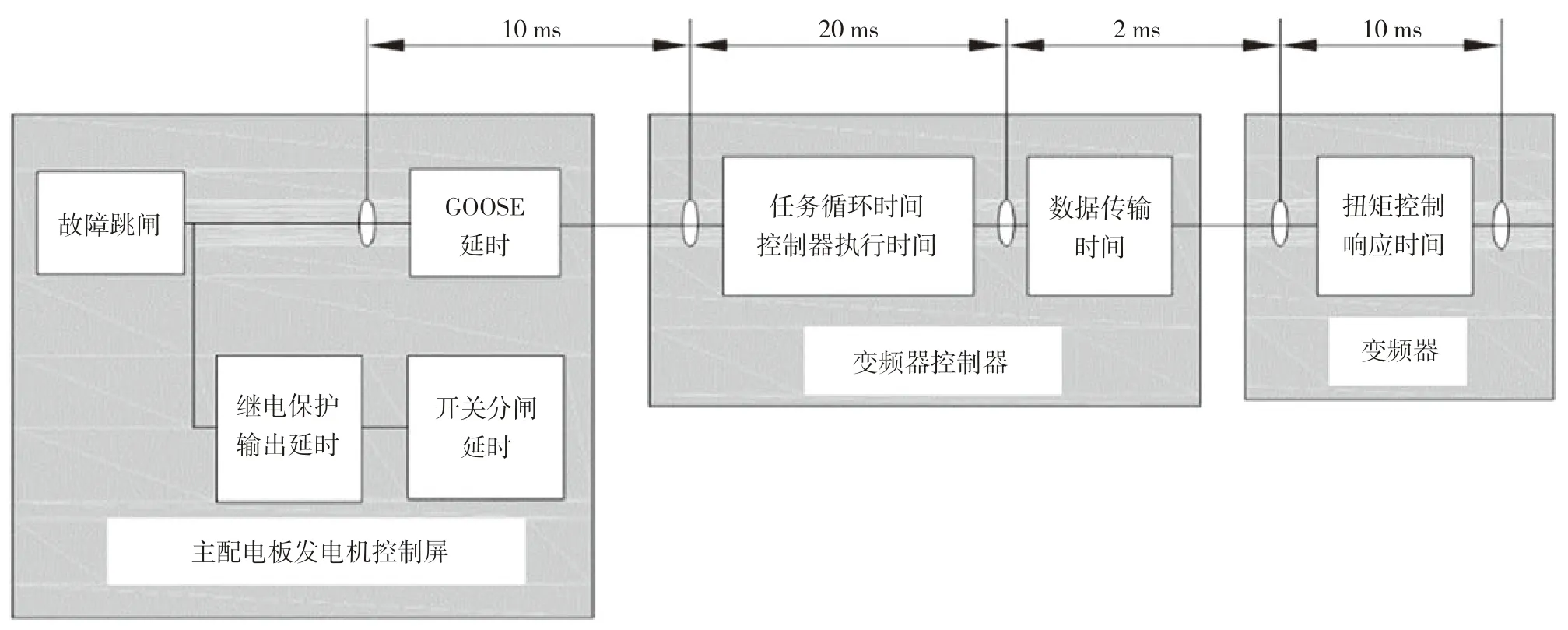
图9 基于事件的故障减载时间
如图10中时序图所示,当发电机开关在t
时刻发出故障分闸指令后,该分闸指令通过I/O输出控制开关的同时也通过GOOSE报文发送给推进器变频器控制系统。在t
时刻,发电机开关分闸完成,在分闸的同时变频器控制器已将减载指令发送给推进器实现减载,因此,发电机跳闸后并不会导致其他在线发电机过载或频率突降。约过1 s后,变频器控制器收到来自PMS更新后的可用功率,随后,变频器在2 s内回到PMS功率限制的控制。
图10 基于事件的故障减载时序图
5 结 语
通过本文的分析结果可以看出,当配电系统采用GOOSE报文通信时,变频器控制系统中基于事件的快速减载比基于频率的快速减载性能更加突出,能够在发电机发生负载突加超限或者过载的情况下快速响应,及时降低电网负荷,使电网平稳过度到平衡的状态。因此,基于事件的功率限制系统更适合作为PMS功率限制功能的后备系统,以弥补PMS应对发电机负载突加超限或过载时响应速度过慢的不足。
随着数字化、智能化继电保护模块和IEC61850通信在动力定位平台电站系统中的普遍应用,推进器和钻井变频器控制系统中基于事件的快速减载功能将会代替基于频率的减载功能。