市域(郊)铁路信号系统制式比选及建议
2021-04-27成正波刘华祥
成正波 刘华祥
(1.上海轨道交通无人驾驶列控系统工程技术研究中心,200071,上海;2.卡斯柯信号有限公司,200071,上海 ∥ 第一作者,工程师)
市域(郊)铁路具有高密度、通勤化、公交化的服务特性,以及距离长、速度快、服务范围广、站间距大等特点。其服务范围、技术特征和运输组织特点均介于国家铁路和常规地铁(轻轨)之间。为增强城市对外辐射能力,市域(郊)铁路要实现与国家铁路干线的互联互通。
1 现有信号系统
目前,我国轨道交通信号系统主要有国家铁路的CTCS(中国列车运行控制系统)和地铁的ATC(列车自动控制)系统。当前已开通的市域(郊)铁路信号系统也主要来自于这两大系统[1],以及STCS(Suburban Train Control System,市域铁路列车控制系统)。
1.1 CTCS
CTCS主要有CTCS-2级和CTCS-3级列车运行控制(以下简为“列控”)系统。为满足城际铁路的公交化运行需求,珠三角城际铁路采用了CTCS-2+ATO(列车自动运行)信号系统。
CTCS-2级信号系统应用于设计时速不高于250 km的线路,采用准移动闭塞制式。其采用ZPW-2000系列无绝缘轨道电路来检查列车占用情况,并向列车传送列车运行前方的空闲闭塞分区数或进路信息;通过点式应答器向车载设备传送临时限速、列车定位、线路参数等信息。地面可不设通过信号机,以ATP(列车自动保护)车载信号设备的信号作为行车凭证。列控车载设备根据轨道电路和应答器传送的信息生成目标-距离速度控制曲线来监控列车运行。
CTCS-2+ATO信号系统在CTCS-2级基础上叠加了ATO系统,能满足列车超速防护、列车自动运行调整、列车自动驾驶、站台精确定位停车、列车车门与站台门防护及联动控制、防淹门、站台紧急关闭防护的需求。
CTCS-3级信号系统应用于时速不高于350 km的线路,仍采用准移动闭塞制式。其增加了RBC(无限闭塞中心)和GSM-R(铁路综合数字移动通信系统)设备。轨道电路仅用于检查列车占用情况;应答器用于列车定位,传输GSM-R网络注册及RBC切换等信息;地面RBC和车载设备通过GSM-R无线网络传输行车许可和线路数据等信息。CTCS-3级列控系统配合ZPW-2000系列无绝缘轨道电路提供的低频信息,可自动向下兼容CTCS-2级列控系统。
CTCS-2和CTCS-2+ATO及CTCS-3目前已大规模应用。根据相关经验,这些系统较为成熟稳定,可实现市域(郊)铁路与国家铁路的跨线运营及互联互通。
1.2 ATC系统
地铁ATC系统采用CBTC(基于通信的列车控制)方案,为移动闭塞制式。CBTC系统的控制精度高,后车可以追踪到前车的尾部,最小行车间隔可达到90 s;CBTC系统的自动化程度非常高,可实现ATO乃至UTO(无人驾驶),可使列车自动化等级达到GoA 4级。
CBTC系统采用车地无线通信传输方式,不仅可大量减少轨旁设备,而且可实现高精度的主动列车定位及车地之间的双向实时通信,具有更高的效率和灵活性。
1.3 STCS
STCS是一种充分借鉴国内外类似项目的建设案例和经验,以目前既有成熟列车控制系统为基础,以功能需求为导向构建的兼容CTCS-2和CBTC的移动闭塞列车控制系统,具备以移动闭塞为基础的高密度、公交化运营能力,并能实现与CTCS-2线路的互通运行。
2 市域(郊)铁路功能需求分析
《关于促进市域(郊)铁路发展的指导意见》(发改基础[2017]1173号)要求:市域(郊)铁路在充分利用既有铁路的基础上,有序新建部分线路,优化完善市域(郊)铁路网络;市域(郊)铁路原则上应采用公交化运营模式。
2.1 互联互通运营需求
无论是新建线路,还是利用既有铁路线改造的线路,市域(郊)铁路内部及其同国家铁路、城际铁路或其他市域(郊)铁路均有互联互通运营的需求,其信号系统也必须满足互联互通的运营需求。
2.2 公交化运营需求
市域(郊)铁路是连接新城及新市镇的纽带,肩负减轻城市交通压力、构建“公交-市域铁路-铁路出行”便捷出行链的重任,具有公交化运营的服务特性。
为了实现公交化运营,市域(郊)铁路还须具备自动驾驶、精确停车、自动开关门、联动屏蔽门及安全门等ATO相关功能,既能为列车精确对标停车及正确开门提供有力的技术保障,也能有效减轻司机和站台客运人员的劳动强度,提高自动化水平和运营效率。
可见,市域(郊)铁路信号系统必须满足公交化运营的需求,具备ATO相关功能。
3 信号系统对功能需求的适应性分析
3.1 信号系统对互联互通及ATO功能的适应性分析
不同信号系统的互联互通适应性分析如表1所示。
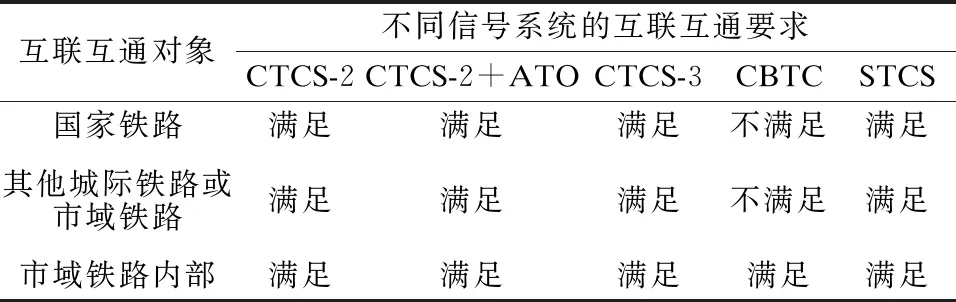
表1 不同信号系统的互联互通适应性分析
在中国铁路总公司主导下,制定了CTCS统一标准,以满足不同系统设备、不同车载设备及不同等级CTCS间的互联互通要求。
地铁CBTC系统目前没有统一的标准。互联互通型CBTC系统虽可实现不同供应商CBTC之间的互联互通,却不能满足与CTCS互联互通的要求。
CTCS-2+ATO系统与CBTC系统均能实现ATO相关功能。CTCS-2及CTCS-3均未能实现ATO相关功能。
根据互联互通及ATO相关功能的要求,市域(郊)铁路信号系统应采用CTCS-2+ATO系统或能兼容CTCS-2+ATO的STCS。
3.2 信号系统对公交化运营的适应性分析
3.2.1 CTCS-2+ATO系统
CTCS-2+ATO系统的核心理念是区间自动闭塞追踪运行。CTCS-2+ATO系统通过调整闭塞分区的长度来优化区间追踪间隔,可使得最小区间追踪间隔缩至3 min。CTCS-2+ATO系统的区间追踪间隔取决于站台区域追踪间隔与折返区域追踪间隔。
3.2.1.1 站台区域追踪间隔
站台区域追踪有两种情况:①到通,当车站存在配线时,前行列车到发线进站停车,后行列车正线通过;②到到,当车站没有配线时,前行列车到发线进站停车,后行列车到发线进站停车。
与到通追踪间隔相比,到到追踪间隔需要多考虑停站时间及列车出清站台的时间。因此,站台区域追踪间隔的最大值为到到追踪间隔。
站台区域追踪间隔时间计算为:
t到到=(L制+L防+L进站)/v到达+(L标+L列)/v出发+t到达作业+t停站
1)
式中:
t到到——前后两列车到达站台的时间间隔;
L制——列车制动距离;
L防——安全防护距离;
L进站——从进站防护信号机至站台停车点的距离;
v到达——列车到达进站防护信号机干扰点时的运行速度;
L标——站台停车后,列车车头与出站信号机的距离;
L列——列车的车长;
v出发——列车出清(L标与L列)的运行速度;
t到达作业——列车到达时接车作业时间;
t停站——列车停站时间。
当设计行车速度为160 km/h、t停站=40 s、t到达作业=16 s时,闭塞分区长度为800 m时,经过牵引计算,t到达=103 s,t出发=42 s。由式(1)可得,t到到为201 s。
3.2.1.2 折返区域追踪间隔
根据折返站的站型,折返区域追踪间隔可按站前折返与站后折返两种情况计算。站前折返的追踪间隔往往大于站后折返的追踪间隔,故本文仅分析站前折返的情况。
根据文献[2]第6.1条与第6.5条的规定,采用CTCS-2+ATO系统的线路在列车折返作业时需执行相应操作流程[2]。因此,列车在折返站的停站时间必须满足完成规定操作流程的需要。珠三角广惠城际铁路为国内已开通运营的、且采用CTCS-2+ATO系统的线路,根据该线路莞惠段(东莞—惠州段)的折返运营数据,计算列车按照规定流程完成折返站从进站停车至折返站起动发车所需的理论时间:在单司机配置下为335 s左右,在双司机配置下为240 s左右。
上海市域铁路嘉闵线的嘉定北站站型简图如图1所示。
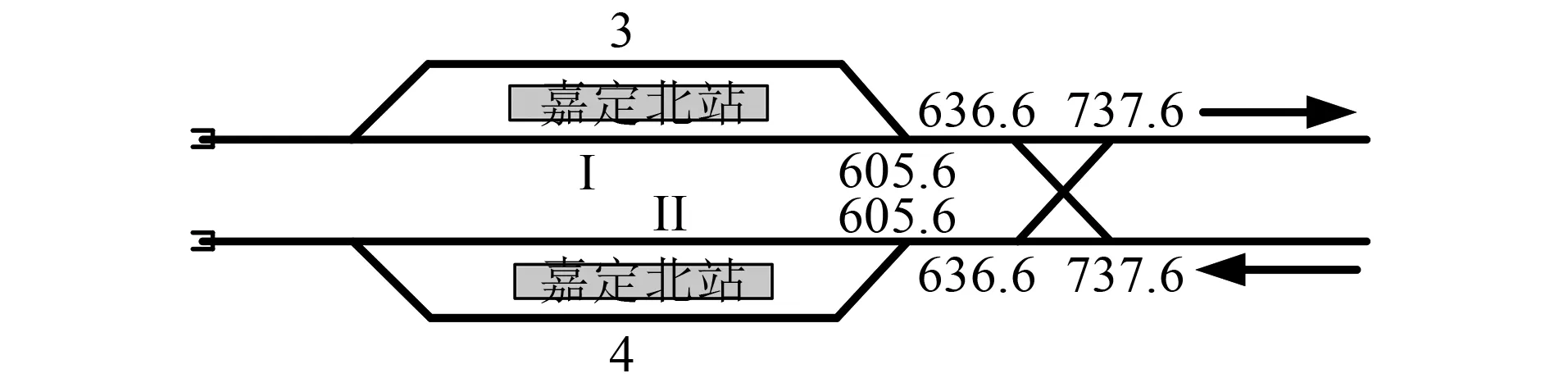
图1 嘉闵线嘉定北站站型简图
嘉定北站的站前单折返追踪间隔相关参数如表2所示,进而可得嘉定北站的站前单折返追踪间隔见表2。表3及表4为嘉定北站站前交替折返的相关参数,进而可得嘉定北站的站前交替折返追踪间隔如表5所示。
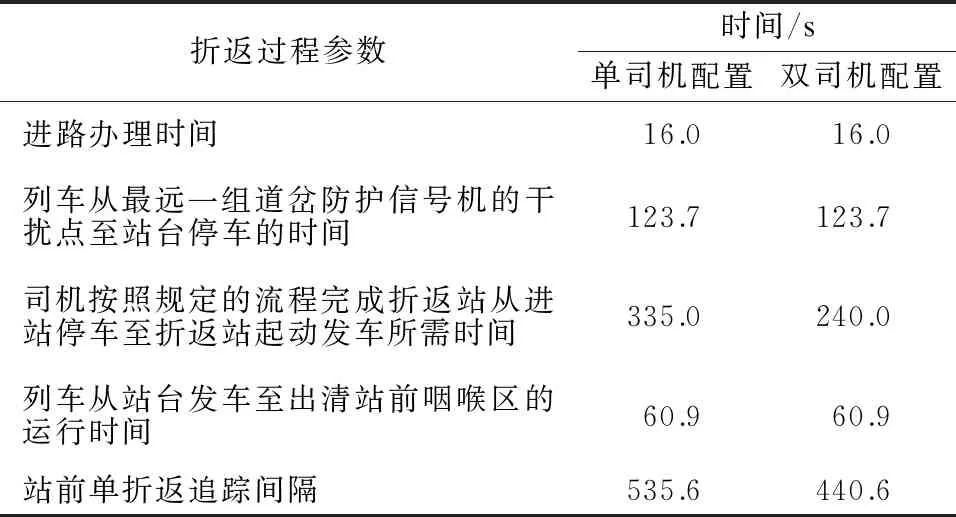
表2 嘉定北站站前单折返追踪间隔

表3 嘉定北站CTCS2+ATO单司机站前交替折返追踪间隔相关数据
分析正线与折返区域的追踪间隔可知:终端站的折返间隔是整条线路公交化运营能力的瓶颈点;在不固定乘客上下车站台的情况下,采用现有CTCS-2+ATO系统时的列车最小追踪间隔可达到221 s左右,能满足较低的公交化运营能力需求(运行间隔大于4 min)。
3.2.2 STCS系统
STCS具备移动闭塞的追踪能力,控制精度高,可使后车追踪到前车的尾部,使正线最小追踪间隔达90 s。采用STCS时,限制列车追踪间隔的主要瓶颈点为列车折返能力。因此主要分析STCS下的站前折返能力。

表4 CTCS-2+ATO双司机站前交替折返追踪间隔相关数据

表5 嘉定北站站前交替折返追踪间隔
同样以图1嘉定北折返站为例,在STCS移动闭塞下的折返能力如表6~8所示。
通过分析表6、表7及表8的STCS追踪间隔可知:终端站的折返间隔是整条线路公交化运营能力的瓶颈点;在固定乘客上下车站台的情况下,列车最小追踪间隔可达约180 s,能满足较高的公交化运营能力需求(运行间隔小于3 min)。

表6 移动闭塞站前单折返追踪间隔计算表

表7 移动闭塞站前交替折返追踪间隔
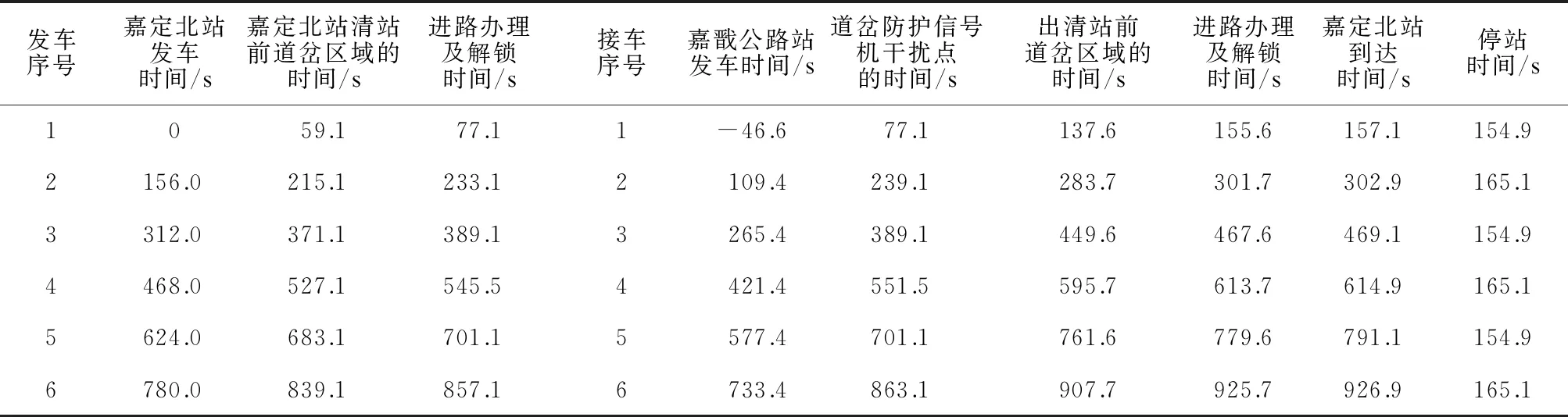
表8 STCS系统站前交替折返追踪间隔相关数据
3.2.3 STCS互通性分析
STCS是兼容CTCS-2的移动闭塞系统,故STCS可以实现与CTCS-2线路的互联互通跨线和共线运营。STCS系统具备互联互通CBTC功能,也可以实现与其他城市轨道交通线路的互通运营见图2。
STCS的架构和原理决定了其支持车载兼容和轨旁兼容两种场景配置:通过配置兼容型的车载设备来满足列车同铁路CTCS线路及地铁移动闭塞线路的互联互通和跨线运营;通过配置兼容型的轨旁设备来满足铁路列车与地铁列车的互联互通和跨线运营。
4 结语
对于市域(郊)铁路而言, CBTC移动闭塞信号系统能更好地发挥公交化运营的优势,同时为了满足互通运行的需求,至少应支持CTCS-2的运行,因此:

图2 STCS市域信号系统互联互通场景
1) 对于公交化运营间隔(大于4 min)要求不高、接受在不同站台乘车的线路,可采用CTCS-2+ATO、STCS信号系统。
2) 对于公交化运营间隔(小于3 min)要求较高的线路,建议采用STCS的移动闭塞信号系统。