多网融合的列车运行控制系统研究*
2021-04-27洪玲娇邢艳阳
潘 亮 洪玲娇 邢艳阳
(卡斯柯信号有限公司,200071,上海 ∥ 第一作者,高级工程师)
2019年2月21日出台的《国家发展改革委关于培育发展现代化都市圈的指导意见》提出:要打造轨道上的都市圈,统筹考虑都市圈轨道交通网络布局,构建以轨道交通为骨干的通勤圈。其重点在于整合都市圈区域内的城市轨道交通资源,加强建设多种制式的城市轨道交通,使之能适应城市的圈层化发展,满足区域出行新需求。
为了满足城市组团间高速、短间隔且无缝衔接的运营需求,必须实现多网融合,即实现不同制式轨道交通的互联互通。具体来讲,不仅要实现市域铁路与一般铁路的互联互通,还要实现市域铁路与城市轨道交通的互联互通。
列车运行控制(以下简为“列控”) 系统是多网融合方案中的关键系统之一。本文针对多网融合的列车运行控制系统关键技术进行分析。
1 既有列控系统方案
目前,国内的成熟列控系统有两类。
1) 面向一般铁路的CTCS(中国列车运行控制系统)。CTCS-2级列控系统(以下简为“CTCS-2系统”)最为常用,其采用轨道电路和点式信息设备(应答器)来传输列控信息。轨道电路负责完成占用检测检查,并连续向列车发送控制信息;点式信息设备负责传输定位、限速和停车信息。因此,CTCS-2系统属于点-连式列控系统。以此为基础,城际轨道交通采用CTCS-2+ATO系统(CTCS-2级系统+列车自动运行系统)。CTCS-3级列控系统(以下简为“CTCS-3系统”)也较常见,其采用无线通信系统和应答器来传输列控信息,由轨道电路负责完成占用检测,由点式信息设备负责定位,属于连续式列控系统。CTCS-2系统和CTCS-3系统适用于不同目标速度的线路,且均为准移动闭塞制式。市域铁路的列车运行目标速度一般为120~160 km/h,可采用CTCS-2级系统或CTCS-2+ATO系统。
2) 面向城市轨道交通的CBTC(基于通信的列车控制)系统。CBTC系统为移动闭塞制式,其控制精度高,具有更高的效率和灵活性,可实现UTO(无人驾驶)。CBTC系统已具备满足高密度开行和公交化运营需求的能力。
铁路和城市轨道交通分别自成体系。要满足多网融合的网络化运营需求,市域铁路的列控系统方案就不能简单照搬。因此,本文将在CTCS-2与CBTC系统的基础上研究多网融合下的列控系统方案。
2 列控系统中关键环节的融合分析
基于表1各方案的比较,对调度指挥系统、临时限速系统、驾驶模式、轨旁列控子系统等4个关键环节的多网融合进行分析。
2.1 调度指挥系统的融合
2.1.1 调度指挥系统的差异
铁路的调度指挥系统为CTC(中央调度集中)系统,城市轨道交通的调度指挥系统为ATS(列车自动监控)系统,二者差别较大。
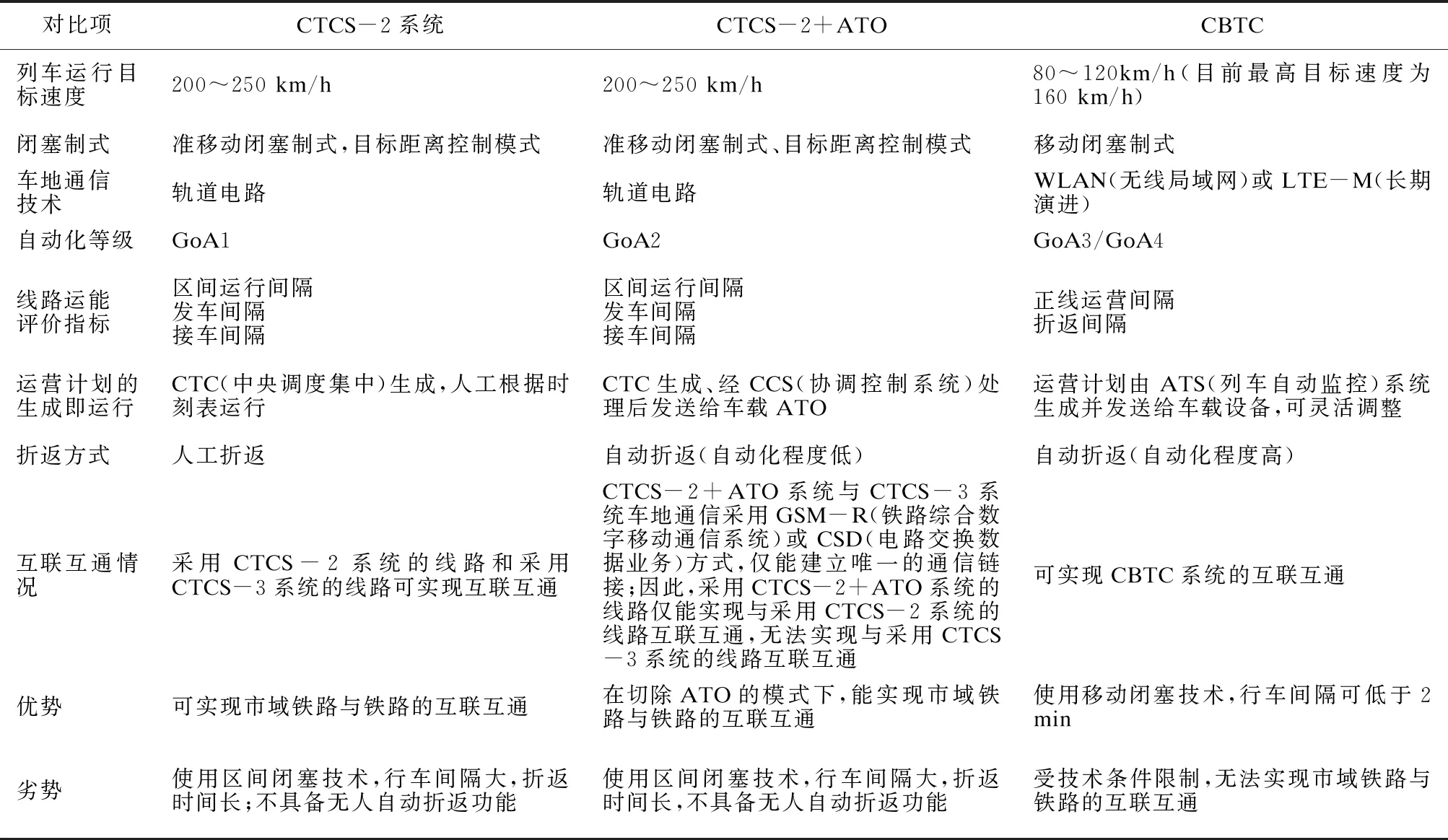
表1 列控系统方案对比
1) 应用环境不同。ATS系统用于城市轨道交通封闭线路。此类线路内作业的规律性较强,相应的列车运营组织自动化程度较高、运营效率较高。CTC系统的应用环境较复杂。铁路列车的运营计划受不同速度等级列车运行的互相影响、网络化运营线路的影响及站内特殊作业等的影响,容易被干扰。
2) 岗位设置不同。城市轨道交通的调度指挥系统为全线集中管理,其作业流程相对简洁,各类特殊作业干扰较小,自动化程度较高,故运营指挥相关人员的岗位层级较少。铁路的调度岗位细化分工较多,非运营类的特殊作业较多,故在铁路列车实际运营中,各调度岗位之间的作业流转环节也较多,流程复杂。
3) 列车运行调整功能不同。铁路运输情况复杂、多变,CTC系统无法自动完成列车的运行调整。当列车运行图被打乱后,CTC系统会进行预测,并提出多种可供选择的修改方案,供调度员进行人工选择确认并下发更新后的运行计划。而ATS系统通过调整列车运行速度和停站时间,与ATO系统配合,高效完成列车运行自动调整。
2.1.2 融合方案
基于上述分析,面向多网融合的调度指挥系统,不仅要结合ATS系统的优势,还要在管理层面优化运营组织、组织结构、运输管理流程及线路作业(特别是折返交路作业等),以提高自动化程度。在市域铁路联络线与CTC接口时,需做好市域铁路与铁路运行计划的高效衔接。
因此,市域铁路列控系统可以在ATS系统基础上叠加CTC系统的功能,也可以在CTC系统基础上融入ATS系统的高效运营调整理念,从而实现高密度市域铁路多车型混跑条件下的运行控制及协同调度。
2.2 临时限速系统的融合
CTCS-2系统的临时限速功能通过临时限速服务器来实现。CBTC系统的临时限速功能通过轨旁ATP(列车自动防护)系统来实现。如果CTCS-2系统与CBTC系统的临时限速功能都按既有的标准实施,则市域铁路临时限速操作及临时限速设置状态难以在两个系统中实现同步。
为确保不同制式列车能在同一区域获取相同的临时限速,临时限速功能应由统一且独立的子系统执行。临时限速子系统需要将设定的临时限速值同步发送至TCC(列车控制中心)和ZC(区域控制器),并验证发送至ZC与TCC中的临时限速状态是否一致。
2.3 驾驶模式的融合
在城市轨道交通与市域铁路的接驳中,能兼容CBTC和CTCS等不同制式的车载信号系统驾驶模式 ,对整体运营效率的提升、运营成本的减少,都具有重要的意义。
目前不同制式的驾驶模式差异较大。CBTC模式下的列车控制等级为CBTC级别、点式列车控制级别和联锁控制级别。
CTCS-2系统属于点连式列车控制级别。基于轨道电路连续发送的速度码及应答器发送的限速信息,列车在控制区域内以自动驾驶模式或完全监控模式下的人工驾驶模式运行。
在不同列车控制级别下,CBTC系统和CTCS分配至应答器的功能不同。首先,CTCS的应答器除了用于列车定位以外,还用于发送速度等其他信息,而CBTC系统的应答器负责提供信号显示信息;其次,CBTC系统和CTCS在应答器数据信息定义格式不同;再次, CTCS-2级系统属于点连式的准移动闭塞,而CBTC系统属于连续式的移动闭塞,故二者点式应答器作用不同;最后,应答器的布置要求差别巨大。
考虑到CTCS-2级系统的行车效率比CBTC系统在点式列车控制级别的行车效率高,也为了有效规避应答器的兼容性问题,列控系统多网融合可将CTCS-2级系统作为CBTC系统的降级模式备用系统,以简化多网融合下的列控方案,提高列控系统的可用性。
优化后,不同的列控级别对应的列车驾驶模式如表2所示。
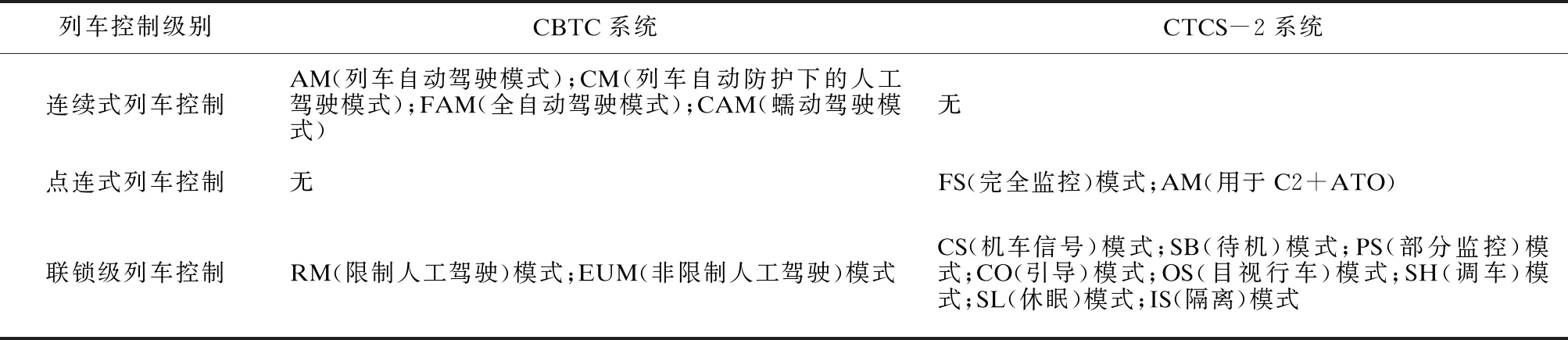
表2 各列车控制级别下的驾驶模式
在列车控制级别由较低等级切换至较高等级时,可由车载列控系统自动完成。在列车控制级别由较高等级切换至较低等级时,若不同控制级别下的设备都能正常工作,则由列车司机向列控系统发出人工降级请求;若较高控制等级的列控系统发生故障,则列车紧急停车,并在缓解紧急制动后降级至较低列车控制级别运行。
2.4 轨旁列控系统的融合
对于铁路:轨旁CBI(计算机联锁)子系统负责站内的联锁进路,以及信号、道岔、轨道电路等轨旁设备的监控;TCC负责监控区间及区间无配线站的进路方向与信号,还负责控制辖区内所有线路的发码。对于城市轨道交通:轨旁CBI子系统实现了区域化,负责整个区域轨旁信号设备的监控及方向控制;ZC基于CBI的方向及信号设备状态来计算行车许可。
基于不同轨旁列控系统的特点,可形成两套融合方案,具体如表3所示。
融合方案一,在由TCC负责的区间范围内,若ZC基于TCC的方向及信号设备的监控状态来计算行车许可,则CBTC系统的运行会受TCC故障的影响,进而降低信号系统可用性;此外,还需额外配置CSS(通信控制服务器),以控制屏蔽门。
融合方案二,将区间的方向及信号设备的监控状态统一分配至CBI子系统实现。由CBI子系统负责站内和区间的方向控制,以及对线路所有信号设备状态的监控;TCC和ZC分别基于联锁方向和设备状态信息来计算各自的行车许可,实现了判定行车许可基础信息的同源,并确保两级列控系统能独立运行、互不影响。因此,从信号系统的可靠性及可用性来看,融合方案二比融合方案一更优。
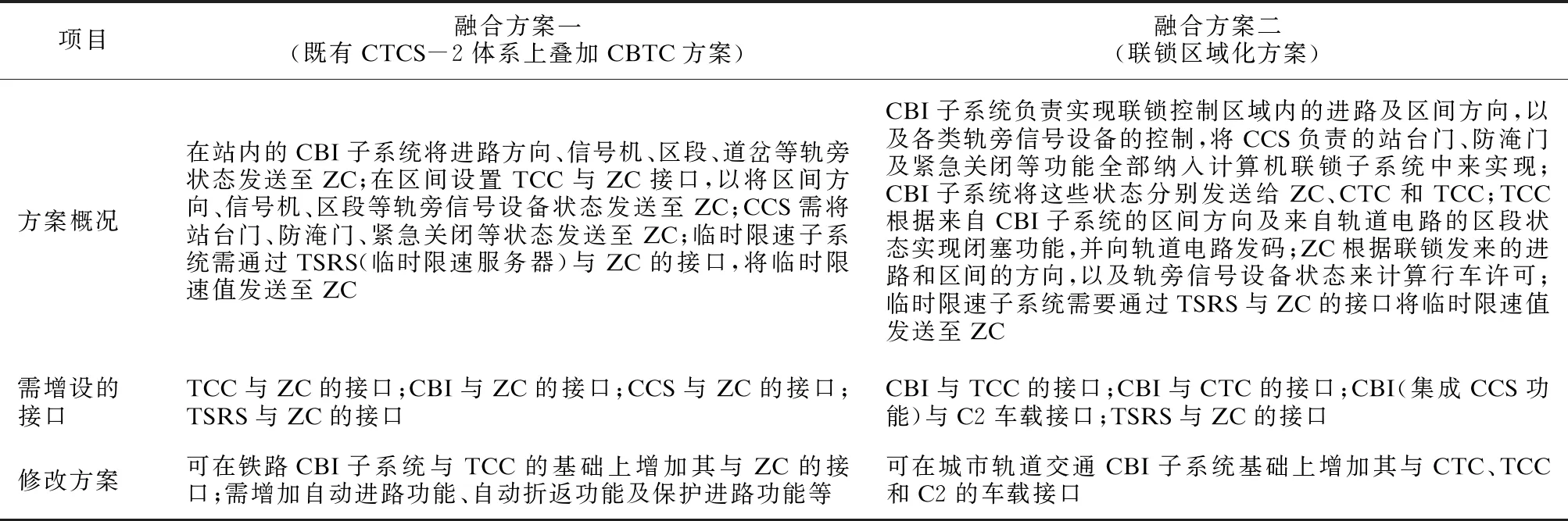
表3 轨旁列控子系统的融合方案
3 结语
在多网融合的框架下,面对市域铁路的小运行间隔、高行车密度及灵活化运营需求,其列控系统建议采用联锁区域化方案,既可以实现与铁路列车的联通联运,也可以在市域范围内相对独立地以CBTC模式运营以确保线路的运能。
临时限速、站内和区间的列车运行方向、信号设备状态等均由同一CBI设备计算,并同步发送至TCC和ZC用于行车许可的计算,从而使得信号系统功能高内聚、系统间接口低耦合,进而降低列控系统复杂度,提高信号系统的可靠性和可用性。
车载信号系统的驾驶模式将结合不同的制式灵活配置,既可单独的配置CTCS-2或者CBTC相应的车载设备,也可融CTCS-2和CBTC所有驾驶模式为一体,形成兼容两种制式的车载信号子系统方案。灵活的组态方案可满足多网融合不同制式下的运营需求。
轨道交通列控系统是多网融合方案中重要的一环。多网融合方案属于复杂系统工程,需要以需求为导向,在线路规划、运输组织、运营管理、行车能力、列车车辆、线路、限界、通信及供电等多个专业协同发展,共享网络资源,共同实现多层次、多模式、多制式的轨道交通多网融合。