基于遗传程序的大中型水闸综合自动化控制系统设计
2021-04-27张龙
张 龙
(安徽省茨淮新河工程管理局,安徽 怀远 233400)
0 引 言
水资源是主要能源资源中的清洁可再生资源,是水电建设中的原动力,水电建设中水电自动化在现今社会发展中占有重要地位[1]。在我国的水利行业中,有很多学者对水闸自动化控制系统进行了研究,并将其应用在工程实例中,取得不错的实际工程效果。但是小型水闸自动化工程不少,大中型水闸的自动化控制研究在国内还比较少[2-4]。在国外研究中,一些发达国家已经拥有较成熟的自动化控制系统,无人值班或较少人值守的水电站已经占大多数,而国内在这方面的应用还存在欠缺[5]。虽然国内的水电自动化水平跟发展成熟的国家相比还有一定的差距,但是随着自动化技术的发展,国内的水电发展进步很快,一些已经建立的水电站正在逐步向全自动化方向迈进,很多研究正在进行或已经在准备中,甚至已经取得了一比较成熟的成果。如基于自适应遗传算法的控制系统和基于PLC技术的控制系统,这两种控制系统面对现在比较复杂的大中型水闸工程,存在可靠性差的问题,这是因为在传统的控制系统,主要依靠一对一的布线来实现信号传输,在庞大的系统中,受到外界的影响比较多[6-8]。因此,设计基于遗传程序的大中型水闸综合自动化控制系统,利用遗传程序建立多目标的控制传递函数,解决传统控制系统中存在的问题。
1 大中型水闸综合自动化控制系统硬件设计
1.1 系统通信功能设计
系统通信功能是实现系统内部各个功能模块之间信息传递的重要功能,在自动化控制系统中,只有保证采集的闸位信息准确、及时,才能保证控制的有效、可靠[9]。在通信功能设计中,主要采用RS485通讯标准,通过差分传输方式,减少噪声信号的干扰[10-12]。以进洪闸启闭机为例,其与中控室的连接电路见图1。

图1 进洪闸启闭机中控室连接电路
在RS485通信网络中,使用485收发器转换TTL电平和RS485电平[13]。其节点中的串口控制器使用RX和TX信号线连接到485收发器上,收发器则通过差分线连接到网络总线上,采用差分信号来传输[14]。在此基础上,使用工业以太网应用在自动化控制系统中[15]。
基于以上通讯标准和通讯协议,构造通讯服务器,通讯服务器的程序流程图见图2。

图2 通讯服务器的程序流程
构造的通讯服务器通过以太网和串口实现数据的接收与发送,并通过数据结构定义每个端口所接收的数据和发送的数据采用的编码方式,根据编码方式,对串口的数据按照协议方式来处理。
1.2 水闸监控界面设计
大中型水闸综合自动化控制系统中,水闸监控界面是执行系统命令的有效途径,是操作人员与机器设备之间双向沟通的桥梁,通过显示屏写入工作参数或输入操作命令,即可实现人与机器信息交互。监控界面也是人机交互界面,主要由硬件和软件组成,其中硬件包括处理器、显示屏、通讯接口和数据存储单元等。硬件组成结构见图3。

图3 人机界面硬件组成
在人机界面显示屏的设计上,选择触摸屏作为主要的人机界面,通过触摸屏检测装置和触摸屏控制器实现人机操作。在监控界面设计中,选择表面声波触摸屏作为监控界面的主屏,这种触摸屏主要通过超声波确定触摸位置,在实际使用中,触摸屏的显示屏四角分别设有超声波发射换能器和接收换能器,通过这两种换能器就可在屏幕上覆盖超声波,进而通过点击时,声波的变化确定触摸位置。
由于在大中型水闸自动化控制系统中,控制参数比较多整个人机界面需要有多个画面组成,因此水闸监控界面主要由5幅画面构成,主要有闸首控制画面、闸首电气量画面、闸首模拟量画面、闸首温度量画面和报警画面组成。通过不同画面可实现水闸不同参数的监控,便于更好地执行自动化控制命令。
2 基于遗传程序的大中型水闸综合自动化控制系统软件设计
2.1 建立控制对象的传递函数
基于遗传程序建立系统控制对象的传递函数,分为两种情况:一种是针对常规控制目标;一种是针对多控制目标。对于常规控制目标,根据系统输入量水压阶跃变化时,输出量闸门压力和电功率的数值,采用遗传程序方法建立两个传递函数,分别是:
(1)
(2)
式中:s为终止符集,在计算过程中随机获得;p为输出量闸门压力;g为输出量电功率;fpb(s)为输出量闸门压力产生的传递函数;fgb(s)为输出量电功率产生的传递函数。
根据闸门开度μ单位阶跃变化时,输出量闸门压力和电功率的数值,采用遗传程序建立对应的传递函数,可得:
(3)
(4)
以上公式中的各项参数,主要是通过遗传程序中适应度函数、种群规模、运行迭代数和终止条件确定的。以上是针对常规目标建立的传递函数,针对多个控制目标,设计多目标遗传程序,输出多目标适应度函数。公式如下:

(5)
式中:x(i,j)为变量i在输入阶跃扰动时,输出量闸门压力p的第j个分量;x′(j)为实际对象p的第j个分量;η1和η2为权系数,η1+η2=1;n为实际对象输出量的分量个数。
计算得到适应度的值落在[0,1]区间内,并且适应度值越接近1,说明对应的程序树越接近实际对象的传递函数表达式。根据适应度值选择变量,进行遗传操作,设复制概率为0.1,交叉概率为0.9,突变概率为0.01,经过迭代计算后,更新上述公式,重新计算系统控制对象的传递函数。
2.2 水闸自动化控制系统的函数控制
定义系统控制目标的传递函数矩阵为H(s)和静态解耦网络Z为:
(6)
(7)
(8)
当上述公式满足以下条件时,此时的解耦网络就是最合适的网络。
(9)
在得到系统控制对象的静态解耦网络后,设计回路控制器,见图4。

图4 回路控制器
在图4中的回路控制器中,两个单输入单输出对象分别是闸门压力和电功率。基于这两个单输入输出对象设计的回路控制器形成很好的闭环特性,实现了水闸自动化动态控制。至此,基于遗传程序的大中型水闸综合自动化控制系统设计完成。
3 大中型水闸综合自动化控制系统性能测试
3.1 实验准备
大中型水闸综合自动化控制系统是一个复杂性较高的项目,整个系统统筹的项目多,并且系统内部构成庞大。为了更好地测试大中型水闸综合自动化控制系统的实际应用性能,以安徽省荆山湖退洪闸为测试背景,研究不同的控制系统实际应用的可靠性。退洪闸的总体平面图见图5。
图5 退洪闸总体平面布置图
作为测试背景的退洪闸,其中闸底板高程17.0 m,单孔净宽为10 m,闸室总宽度为340.6 m;闸顶高程25.8 m,闸室顺水流方向长19 m,日常承担泄洪的任务。以此为背景,研究大中型水闸综合自动化控制系统的可靠性,主要从两方面入手,一个是系统内部元件的故障情况,对于大中型水闸,其控制系统内部存在多个电子设备单元,通过串联、并联等方式连接在一起,系统中使用的均是比较常见、基础的电子设备,其中包括电阻、二极管、集成电路等电子元器件。要测试控制系统的可靠性,可通过计算系统元件的总故障率实现。系统总故障率的计算公式如下。

(10)
式中:κs为控制系统的总故障率(1/h);N为系统所用元器件的种类数目;Ni为第i种元器件的数量;κi为第i种元器件的通用故障率(1/h)。
在系统元件总故障率测试和闸门开度测试中,使用的控制系统分别是基于自适应遗传算法的控制系统、基于PLC技术的控制系统。
3.2 系统元件总故障率测试结果及分析
系统元件总故障率测试中,设定相同的环境条件和使用条件,在统一的测试条件下,获得不同系统的元件总故障率测试结果。具体测试结果见表1。
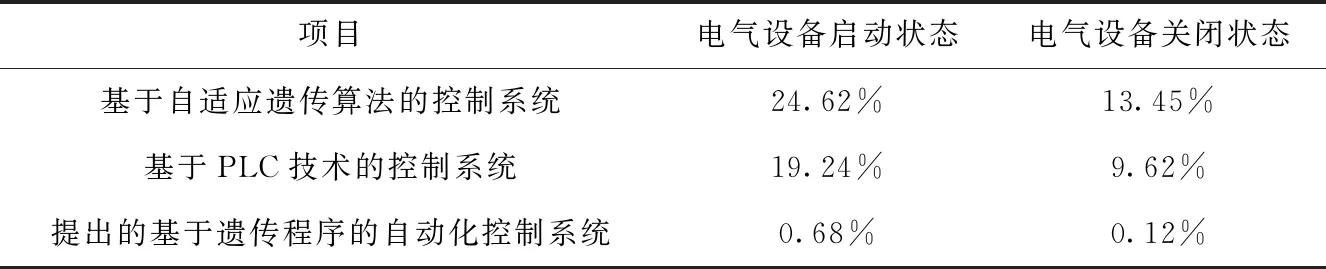
表1 不同系统的系统元件总故障率测试结果
表1中结果显示,控制系统在电气设备启动状态下的故障率要高于关闭状态,由3组结果对比来看,传统的基于自适应遗传算法和基于PLC技术的控制系统元件总故障率高于15%。相比之下,提出的基于遗传程序的自动化控制系统元件的总故障率只有百分之零点几。综上所述,设计的大中型水闸综合自动化控制系统故障率极低,满足系统实际应用的需求。为了保证测试研究的严谨性,再结合闸门开度测试结果分析系统的可靠性。
3.3 闸门开度测试结果及分析
在控制系统中,位移传感器检测的是油缸行程,不能直接反映闸门的开度值,因此通过第三方软件将油缸行程转换成闸门开度,闸门全关位置开始油缸每运行0.5 m,对应输入一个闸门的开度值,直到油缸全部伸出。
在测试之前,对油泵和闸门进行调试,将转换开关置于“自动”位置,设置“预置开度”值大于闸门最大开度,采用分段停止调试方式,将初始油缸行程设定为0.5,开启闸门,油缸运行完成后,测量实际及闸门开度。完成后,重新设定油缸行程,以此类推,以0.5为单位,测试在不同的控制系统控制下1#闸门油缸行程和闸门开度的情况。
传统控制系统与设计的控制系统测试结果见图6。
测试中不断调整油缸行程,获得闸门开度的变化数据。对比观察图中结果,图6(c)中显示在油缸行程为3.5时,闸门开度达到最大8 300 mm;在同一测试条件下,图6(a)中结果只达到4 100 mm;图6(b)中结果未显示出正常的闸门开度值,这说明已经超过了该系统的可控范围。再结合系统元件总故障率测试结果可知,设计的基于遗传程序的大中型水闸综合自动化控制系统元件故障率低,闸门动作准确,该系统的可靠性更强。

图6 不同控制系统闸门开度测试结果
4 结 语
本文围绕着大中型水闸的控制情况,在原有的水闸自动化控制系统的基础上,设计基于遗传程序的大中型水闸综合自动化控制系统。针对传统的控制系统中可靠性差的问题,设计对比实验,验证了在自动化控制系统中应用遗传程序技术,有效地解决了自动化控制系统可靠性差的问题。但是在设计中依然存在不足之处,受到时间和实验环境的限制,在设计过程中未考虑到自动化控制系统的经济效益。在未来发展中,应结合实际水电工程项目,积极采用性价比高的新技术,为自动化控制系统的经济可靠性及功能的正常发挥创造条件,进一步提高系统的实际应用能力。
