沪苏通长江大桥主塔钢锚梁定位技术
2021-04-26黄红林
黄红林
(中铁大桥局集团第二工程有限公司,江苏 南京 210015)
1 工程概况
沪苏通长江大桥是新建沪苏通铁路的控制性工程,位于江阴长江公路大桥下游约45 km,是世界上首座主跨超千米的公铁大桥。主桥长2 300 m,桥跨布置为142+462+1 092+462+142(m)双塔钢桁梁斜拉桥,主跨1 092 m(见图1)。桥址处江面宽度5.4 km,两主塔位于江中心,离岸边距离1.5~2.0 km。

图1 主桥立面布置图(单位:m)
主塔28#、29# 墩结构尺寸相同,钢筋混凝土结构,桥面以上为倒Y 形,下塔柱内收为钻石形。塔顶高程为+333 m,塔底高程为+8 m,承台以上塔高325 m。斜拉索为扇形三索面,每个主塔共36×3=108 对斜拉索,其中有99 对斜拉索锚固在钢锚梁上。钢锚梁竖向间距从上到下依次为2.8 m、3.0 m、3.2 m、3.4 m。全塔钢锚梁根据尺寸和管径,分为A、B、C 三类。钢锚梁斜拉索预埋套筒分为3 段(L1、L2、L3),L1 预埋于混凝土塔壁中,通过劲性骨架定位,L2 焊接于牛腿预埋钢板上,并与L1 通过法兰盘连接,L3 焊接于锚垫板上,并与L2 之间留20 mm 间隙以适应钢锚梁的弹性伸长。
2 前期准备工作
钢锚梁定位精度要求很高,设计要求索道管进出口空间位置为±5 mm,两管口连线与设计位置夹角不超过5”。由于两主塔距离岸边控制点太远,常规的坐标放样法精度难以满足设计要求,应根据施工情况进行控制点加密。
2.1 控制网复测和加密
根据施工测量控制需要,结合施工实际,控制网采取分阶段进行加密,即随着桥墩从基础到上部结构施工,加密点从沉井基础到承台再到墩身顶部,逐步上移。加密点与岸上首级控制点采取同步扩展的方式进行加密。
主桥平面网采用GNSS 控制网[1],等级为二等。其中26D,31D 位于26# 墩、31# 墩帽上,28D,29D 位于主塔下横梁上,其余点为岸上点,均为强制对中墩。加密网形如图2 所示。

图2 主塔施工控制点和加密点布设图
2.2 建立独立坐标系
由于大桥中线为直线,为了方便测量钢锚梁的偏位,可以建立以桥轴线和墩中线为轴线的桥梁独立坐标系[2]。在独立坐标系下,主塔28# 墩、29# 墩中心坐标分别为(17248.84,0),(18340.84,0)。
2.3 钢锚梁组拼测量
尺寸检查:钢锚梁在工厂内加工制造,由机床下料、在特制胎架上进行焊接,在拼装场内将各单元件拼装成整体。用全站仪测量钢锚梁及索道管各特征点三维坐标,检查钢锚梁高度、螺栓孔与预留孔道间距、结构对角线尺寸等,用钢尺复核结构尺寸,各结构尺寸偏差须小于3 mm。
钢锚梁与钢牛腿的组拼:拼装在经过调平的台座上进行。首先建立拼装测量控制网,单节钢锚梁预拼在场地上平行布设2 个平台,调整平台顶面高程,将钢锚梁吊装在平台上并作简易固定,起吊两侧壁板进行初步组拼。测量壁板尺寸和四角高差、锚固点高程、索道管与钢锚梁轴线相对位置关系、壁板四角上下对角线长度等,满足设计要求后进行钢锚梁连续预拼。
连续预拼:将单节钢锚梁整体起吊,与下一节钢锚梁进行对接,形成整体。测量项目除进行常规的尺寸复核外,还要测量两侧壁板的累积高度和顶面的四角高差、倾斜度等,见图3 所示。组拼完成后,在横梁上标示上、下层对应轴线及特征点,作为塔柱上安装测量的位置基准。

图3 钢锚梁连续预拼图
3 钢锚梁定位测量
钢锚梁和斜拉索区一般位于上塔柱,塔柱施工按爬模法分节段施工,其施工工序和钢锚梁测量定位步骤如下:
(1)钢锚梁底下塔柱施工→(2)基准点埋设与测量→(3)钢支架安装定位→(4)刚牛腿、钢锚梁安装定位→(5)塔柱劲性骨架及钢筋安装→(6)塔柱模板检查→(7)索道管三维位置复查→(8)浇筑混凝土监测→(9)索道管竣工测量→(10)下一节钢锚梁定位。
3.1 定位方法
由于主塔远离岸上控制点,钢锚梁定位主要采用内控法进行。所谓内控法[3],是将全站仪架设在塔柱内部的基准点上,后视塔上另一基准点,来进行钢锚梁的定位。此处的基准点,是指埋设在塔肢上,用来精确定位塔柱、钢锚梁、钢筋劲性骨架等设施且位置相对稳定的测量控制点。基准点一般采用强制对中装置,焊接在劲性骨架或钢管桩上,以消除仪器对点误差。因此,基准点的测设及测量精度,成为钢锚梁精确定位的关键环节。
3.2 基准点测设
基准点的测设主要有GNSS 静态测量法和边角后方交会法。
3.2.1 GNS S 静态测量法
GNSS 静态测量法,是在塔顶基准点上安置GNSS 卫星接收机(至少2 台),与南北两岸的控制点进行静态联测,解算基线进行平差,得出基准点坐标。由于受到环境温差、混凝土收缩徐变、风力等因素的影响,高塔柱会有扭转和变形,因此GNSS 静态测量只适合在晚上塔柱变形最小时,才可进行。
3.2.2 边角后方交会法
边角后方交会法是用带有自动照准目标、高精度的全站仪(测角精度0.5″)架设在基准点上,观测岸上控制点的距离和角度,通过平差计算得到基准点的平面坐标。由于塔上基准点和岸上控制点高差最大达330 m,边长投影改正最大约50 mm/ km,因此测量距离时,应往返测量边长斜距,将边长投影改化到相应的高程面后进行平差计算[4]。
边角后方交会法要求基准点与控制点间距离不宜大于1.5 km,夹角不应小于30°,控制点不少于4个。
观测技术要求[4]:
边长观测:每边观测4 测回;一测回读数较差限值为2 mm;测回间较差限值为3 mm;一测回是指全站仪盘左、盘右各照准一次,每次读数2~4 次;边长经气象、仪器常数、投影高程面改正后取平均值作为边长观测成果。
水平角观测:采用全圆观测法分别照准控制点,角度观测6 个测回;半测回归零差不大于4″;一测回内各方向2C 互差不大于8″;同一方向值各测回互差不大于4″;各测回观测结果取平均值作为水平角的最终成果。
3.3 首节钢锚梁定位
首节钢锚梁安装前要对主塔进行变形监测。中塔柱施工完成后,塔柱高度已超过200m,考虑到日照、温度、风力等外部因素对塔柱的变形影响很大,首节钢锚梁定位前须根据塔的变形情况对放样数据进行修正。
3.3.1 塔柱的变形监测
在已竣工的每个上塔柱段的上、下游侧埋设棱镜,进行48 h 连续观测,观测频率为1 次/2 h,同时测量大气、塔柱四面等环境温度。利用两台全站仪同步观测塔上棱镜,固定设站点和后视点,分别观测从横梁至上塔柱的所有埋设棱镜,取两台仪器观测值的平均值,作为塔柱变形测量的初始值。绘制纵、横桥向塔柱的变形曲线,确定塔柱“零变形”状态时的坐标值,温度和观测时间。
3.3.2 基准点测设
在塔柱“零变形”状态的时间段内,对基准点进行加密测量,基准点测设应采用两种方法进行校核。
3.3.3 钢锚梁定位测量
首节钢锚梁由四根钢管桩来支撑,精确测量四个支撑管桩位置和高程,放样出钢锚梁和刚牛腿的设计位置(高程需考虑主塔压缩量),并弹好墨线。起吊整节钢锚梁,放在预先画好的墨线上,运用全站仪测量索道管锚固点和出塔口坐标,反复调整钢锚梁直至设计位置。
用“内控法”定位钢锚梁,放样坐标是不需修正的,因为基准点和塔柱的变形近似同步,可以实现钢锚梁定位全天候作业。但为了进一步提高定位精度,定位测量仍然选择在塔柱“零变形”状态下进行。
3.3.4 索导管定位器
为了方便测量索道管锚固点和出塔口中心位置坐标,根据索道管的型号尺寸,定做出相应的索道管定位器,其锚固端口和出塔口分别为圆形和椭圆形,标志出定位器中心,钢锚梁定位时可直接测量出管口中心点坐标,见图4 和图5 所示。

图4 锚固点中心定位器之实景
3.4 钢锚梁其他节段定位
钢锚梁在制造和安装时尺寸存在偏差,随着塔柱高度的不断增加,钢锚梁定位偏差也逐渐累积加大。因此,当钢锚梁安装到一定高度后(每5 节)要进行纠偏。纠偏采用微调螺栓,在钢锚梁分组对接牛腿位置,设置一批微调螺栓,根据测量的钢锚梁实际倾斜、偏差情况,调整微调螺栓,控制钢锚梁累计偏差。

图5 出塔点中心定位器之实景
4 高程传递
在边墩(26#、31#)墩身施工和主塔墩(28#、29#)下横梁施工完成后,应进行水准贯通测量,将岸上高程控制点加密至边墩帽梁和主塔横梁(承台)上,测量方法为测距三角高程法[5],见图6 所示。

图6 高程加密水准传递示意图
塔柱高程传递主要方法有:全站仪天顶测距法,悬挂钢尺法,三角高程差分法等。测量时,通常要应用两种方法相互检核。
4.1 全站仪天顶测距法
利用全站仪的光电测距功能,对处于同一铅垂线上不同高程的两个点进行垂直测距,则两点间高差就是全站仪所测的竖直距离与仪器高度之和。
作业时,要保证棱镜中心和全站仪中心在一条铅垂线上。仪器高度测量可以采用水平视线法,把仪器安置好后放平望远镜(天顶距为90°00′00″),从已知点A(点A 与设站点距离较近)处所立的水准尺上读取读数,从而实现从已知点A 到待求点a 之间的高程传递,消除了直接量取仪器高而带来的测量误差。施测时,应多测回、多时段测量,取平均值以保证a 处高程测量的精度。
4.2 悬挂钢尺法
在无风、气温稳定状况下,在钢尺上悬挂一个15 kg的重物,水准仪测量下横梁A 处水准尺的读数和竖直悬挂塔身上的钢尺的读数,测得横梁至塔身的高差,从而将下横梁点A 的高程传递到塔身上面。如图7 所示,塔身B 点处的高程为:HB=HA+a+(a1-b1)-b。高差测量读数四次,取其平均数。计算高差时,应进行钢尺的尺长改正。

图7 悬挂钢尺传递高程法示意图
4.3 三角高程差分法
三角高程差分法,是在一高程控制点上架设全站仪,利用单向三角高程法,测量塔柱下横梁上高程控制点的高程。因为球气差的缘故,测出的高程值与原高程值存在差值△h,可根据△h反算大气折光系数K,改正仪器内的系数K值,再次测量高程直到接近目标高程后,方可进行高程传递。
以28# 主塔为例:全站仪架设在26# 墩顶高程点,精确量取仪器和棱镜标高度,单向测量26# 墩顶高程点至28#下横梁控制点间高差h。根据下述公式计算K值:
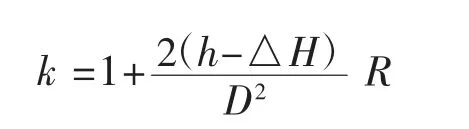
式中:h为两点实测高差;△H为两点间理论高差;D为两点间水平距离;R为地球平均曲率半径。
由于K值随着大气的状况不同而变化,在日出后及日落前2 h 内,K值变化剧烈,不宜进行三角高程差分测量。在主塔高程传递过程中,要每0.5 h 进行一次差分计算,确保K值选取准确。
5 钢锚梁竣工测量
钢锚梁安装完成后,需要进行竣工测量。竣工测量方法与定位测量方法相同,在对钢锚梁定位的同时,运用索导管定位器,对上一节段已灌注混凝土索道管的锚固点和出塔点进行竣工测量,并与设计值进行比较。若偏差超限,应查明原因,在下一节段进行纠偏。
6 结 语
沪苏通长江大桥主塔钢锚梁定位方法实用,精度可靠。从竣工测量数据来看,索道管锚固点、出塔点偏位、钢牛腿,以及钢锚梁高程均满足设计要求。钢锚梁的安装定位结合施工条件和外界环境,定位精度高,为后续钢梁架设,斜拉索安装,斜拉索索力调整提供了技术保障,保证了施工按时完成。该方法在两主塔墩的成功应用,为其他同类桥梁及类似工程应用提供了技术指导和借鉴作用。
