智能网联汽车测试场场景设计方法研究
2021-04-26孔令旗陈天姿冀建波
孔令旗,陈天姿,冀建波
[同济大学建筑设计研究院(集团)有限公司,上海市 200092]
0 引 言
智能网联汽车作为新一代汽车工业的重要发展方向,其安全性、智能性是重要的评价指标。作为“无人驾驶”的汽车,需要完成哪些安全测试,什么样的汽车可以称为智能网联汽车,什么样的汽车是安全的,目前国内外并未形成一套基本的标准或法则来明确这些问题。
借鉴传统汽车测试方法,对智能网联汽车进行安全测试成为解决上述问题的重要手段。但有别于以汽车极限性能测试为主的传统汽车测试场,智能网联汽车测试以运行安全测试为主,同时测试场景的设计是测试场测试能力的核心。
1 测试场景分类
有别于传统汽车,基于互联网技术的智能网联汽车能够实现位置、速度等自身运行状态的信息传输共享,同时可以通过自身设备、路测设备、网络终端获取周边道路、车辆、环境等信息。根据智能网联汽车的实际运行状态,围绕“车- 路- 环境”三者之间的关系,构建车- 车、车- 路、车- 环境三类测试场景集。
基于车车通信,可以构建车辆超车辅助、汇入辅助、交叉口冲突避免等典型场景;基于车路通信,构建交叉口通行辅助、弯道速度预警、动态车道控制等场景;车与环境的测试,主要集中在雨、雾、冰、雪等自然环境下车辆控制、行人等移动侵入物的识别与避让,以及隧道环境信号屏蔽响应等。
2 典型场景设计方法
通过分析场景交通行为、安全因素,解析场景中车辆、路侧设施、环境因素等要素数据,提出典型场景中路段形式、车道数量、交叉口形态、路线长度、路侧设备等基本要素的技术指标要求。
2.1 同向/逆向超车辅助
2.1.1 场景描述
如图1 所示,车辆行驶过程中,后方B 车通过车车通信向周边车辆发出超车需求,周边车辆(A 车、C车等)接收到车辆超车需求信息后,调整车辆轨迹,使B 车能高速、顺利完成超车作业,有效避免车辆发生碰撞事故。

图1 同向/ 逆向超车辅助场景示意图
2.1.2 场景需求分析
该实验场景主要在长直线道路完成实验,车道需求至少单向2 车道,该场景目前尚未有任何实验标准可供参考。为符合现实生活中车辆超车时的真实状态,可将实验车速覆盖在30~80 km/h 范围内,以实验超车辅助场景分别在低速、高速状态下的运行状态。
该实验场景对于场地建设的需求总结见表1。
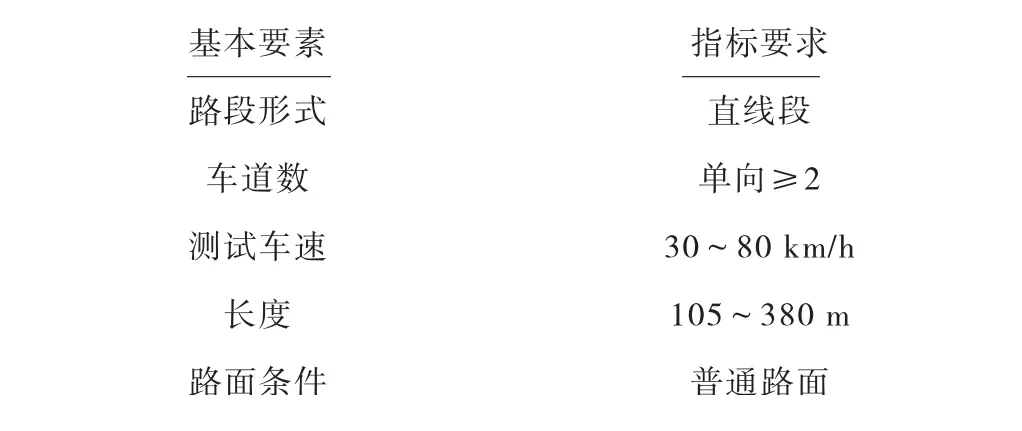
表1 超车辅助场景建设需求
2.2 交叉口冲突避免
2.2.1 场景描述
车辆行驶至无信号灯交叉口,由于无法得知其余车辆驾驶员采取何种驾驶措施,常会导致车辆碰撞事故的发生。交叉口冲突避免通过车车通信,采集进入交叉口车辆的速度、位置等信息,通过预测未来行车轨迹判断冲突方向车辆的潜在碰撞概率,当车辆判断出存在碰撞隐患时,则通过提醒驾驶员加速、减速等信息或车辆自动加减速,让优先级别高的车辆优先通过交叉口(见图2)。

图2 交叉口冲突避免场景示意图
2.2.2 场景需求分析
该实验场景需要在交叉路口实现,十字型、T 字型路口均可,需要存在冲突方向车流。为符合现实生活中大多数路口形式,使路口灵活性更高(十字型可灵活变为T 字型),同时在实验过程中实现多股冲突车流冲突避免的场景,建议以十字型交叉路口为主。
该实验场景对于场地建设的需求总结见表2。
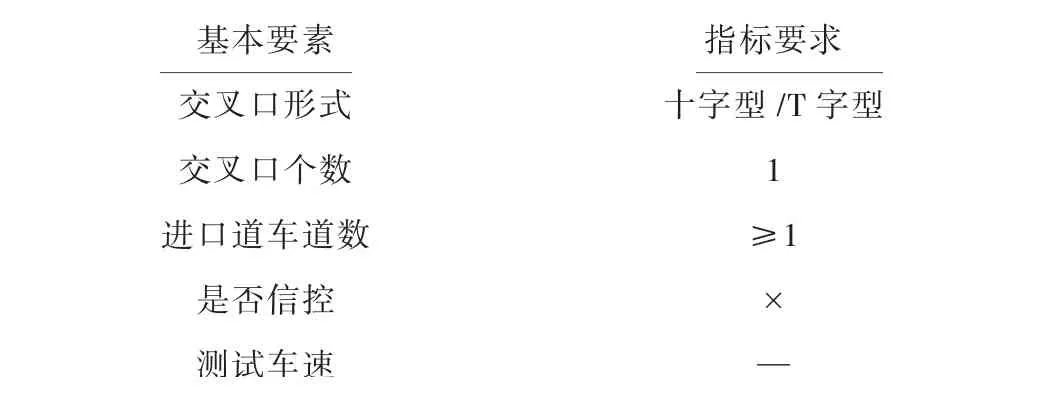
表2 交叉口冲突避免场景建设需求
2.3 交叉口信号配时优化
2.3.1 场景描述
实验车辆均为搭载车载系统的智能车辆,车载系统内有车辆行驶的车载数据,包括实时车辆位置、车速、历史路径(包括在该路段的转弯信息等)等。车辆实时地通过DSRC 设备将车载信息传送至路侧设备,路侧设备根据各车现有位置、车速和历史路径信息判断在即将通过测试路口的车辆数和不同转弯方向的车辆数,以及到达时间,来对信号交叉口进行重新配时。配时以交叉口总体延误最小为最终目标。

图3 交叉口信号配时优化场景示意图
2.3.2 场景需求分析
该场景需要一个小型城市路网,需要有至少一个信号控制交叉口,同时需要路侧设备以实现信息交互。
该实验场景对于场地建设的需求总结见表3。

表3 交叉口信号配时优化场景建设需求
2.4 雾环境下速度控制和预警
2.4.1 场景描述
如图4 所示,大雾环境下,A 车在道路上行驶,车辆利用搭载的车载交通环境视觉感知与预警系统获得能见度的估计值,据此确定安全行车速度,根据实际车速进行风险预警,提醒驾驶员应适当减速确保安全,或车辆自动将速度降至安全车速以下。能见度变化的实现由烟雾发生器产生并控制,能见度大小可调可控。
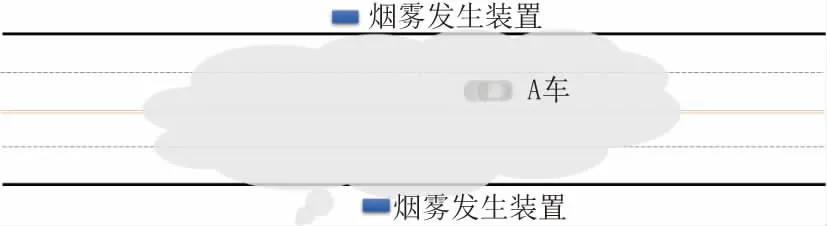
图4 雾环境下速度控制场景示意图
2.4.2 场景需求分析
该实验场景可在长直路段实现,根据能见度在50~500 m 左右时对车速的限制,实验车速需要在20~80 km/h 之间进行测试,长度应在70~380 m 左右,路段至少单向2 车道。
该实验场景对于场地建设的需求总结见表4。

表4 雾环境下速度控制和预警场景建设需求
2.5 隧道通信和定位能力测试
2.5.1 场景描述
该场景主要利用隧道进行智能网联车辆信号屏蔽测试,智能网联车辆依赖于车辆与外界的通信,因此需要测试车辆在通信屏蔽环境下车辆的反应和运行情况,以保证智能网联车辆运行的安全性(见图5)。
2.5.2 场景需求分析
该场景需要隧道,为实现信号的有效屏蔽,建议隧道长度大于100 m,同时在隧道周围布设各类通信设备。
该实验场景对于场地建设的需求总结见表5。

图5 隧道测试场景示意图

表5 隧道测试场景建设需求
3 结 语
基于归纳推理的智能网联汽车安全测试,测试场景复杂。怎样在复杂多变的各种可能运行状态中选择合适的状态予以场景固化,再通过场景设计解析构建场景模型和建设需求,支撑智能网联汽车测试场总体设计,是测试场总体设计成败的关键。本文以基于“车- 路- 环境”的部分典型测试场景为案例,详细解析了从运行状态到建设需求的落地过程,可为未来测试基地总体设计提供指导。
