多服务低速率数字光载射频系统中的新型自动增益控制算法设计
2021-04-25陈爱新王学锋陈远航刘晓滨姚宜东
李 文 陈爱新 王学锋 陈远航 刘晓滨 姚宜东
①(北京航空航天大学 北京 100191)
②(北京航天控制仪器研究所 北京 100094)
1 引言
数字光载射频(Digital Radio-over-Fibre,DRoF)技术由于具有低成本、灵活性好、高带宽和抗干扰性强等优点而被广泛应用于室内信号分布系统中[1]。基于DRoF技术的室内信号分布系统可以利用现有的宽带高速光纤网络[2]实现远距离射频信号传输和低成本网络建设,是未来高性能射频信号传输的理想解决方案。在信号塔较少的环境中,同时支持多服务射频信号传输的DRoF系统能够共享现有的无线网络基础设施来提高资源利用率、降低施工成本[3]。然而,多路微波甚至毫米波信号的同时传输将使得系统的链路传输速率急剧增长,需要使用昂贵的高速光收发器和高速光纤。在需要同时支持中国3家移动运营商(Mobile Network Operators,MONs)所有服务信号传输的系统中,此类问题尤其突出。
事实上,应用在多服务DRoF系统上的数据压缩技术已被广泛研究,利用此类压缩技术可以增加系统的传输容量以使系统能够提供更多服务。文献[4]提出了一种新型数据压缩技术,其采用频谱压缩和量化压缩的方法来大大降低链路传输速率,其数据传输效率比通用公共无线电接口(Common Public Radio Interface, CPRI)提高3倍。然而,数据压缩技术在降低链路传输速率的同时会极大降低系统输入动态范围和信号传输性能[5]。但是受通信距离远近、多径效应等因素影响,DRoF系统接收的射频信号幅度变化较大,系统需要具有较大输入动态范围,且其对上行链路要求尤其严格[6]。因此,系统需要在数据压缩前进行自动增益控制(Automatic Gain Control, AGC)来保持甚至增加输入动态范围。由于控制量为数字信号或模拟信号,增益控制方法可以简单分为模拟AGC算法[7]和数字AGC算法(Digital Automatic Gain Control, DAGC)[8]。模拟AGC基于模拟电路来进行功率检测和增益控制,该算法复杂但控制量准确[9,10],DAGC则基于数字电路来完成增益控制,具有简单、易实现的特点[11]。文献[12]提出了一种可用于数字音频广播接收机瑞利衰落信道中的快速精确DAGC,该算法只使用了移位和比较等简单的运算且应用方便。然而,该AGC算法需要0.5 ms来调整链路增益,其并不能满足长期演进计划(Long Term Evolution,LTE)信号传输需求。文献[13]提出了一种应用于数字分布式天线系统的多级AGC算法,该算法能提高系统动态范围,但是它完全依赖模拟电路来进行功率估计,当输入功率剧烈变化时,该算法的增益调整准确度和响应时间特性较差。文献[14]提出的前馈AGC算法着重于充分利用ADC的量化位数和保持输出信号的峰均比不变,但是该算法的开环结构精度有限且稳定性有待提高。文献[15]提出了一种新型DAGC算法,但是未对系统的动态范围如何提高进行详细说明。文献[16]利用查找表的方法来快速准确地控制多级射频器件的增益,大幅度提高系统的输入动态范围,但是该方法需要使用多级放大器,硬件电路成本较高。
本文提出并研究了一种可应用于多服务低速率DRoF系统中的新型快速两级自动增益控制(Fast-Settling Two-stage Automatic Gain Control,FST-AGC)算法。本算法引入包括主AGC环路和从AGC环路等的两级增益控制,并采用周期内多阈值比较的控制机制,可以使系统在进行数据压缩的同时提高动态范围性能,具有快速稳定的特点。实验结果表明,系统进行数据压缩后可支持14路运营商业务信号低速率传输,但系统输入动态范围只有33 dB。而引入从AGC环路或主AGC环路后,系统输入动态范围分别提高31 dB和10 dB。相比只进行数据压缩的传统方案,引入两级AGC环路(FST-AGC)的多服务低速率DRoF系统可提高40 dB输入动态范围,其73 dB的输入动态范围可以满足第三代合作伙伴计划(3rdGeneration Partnership Project, 3GPP)对系统性能的指标要求。更为重要的是,引入两级AGC环路的系统EVM值明显低于引入主AGC环路或从AGC环路的EVM值,表明引入FST-AGC算法后系统的信号传输质量得到明显改善。同时,仿真结果表明该算法的控制响应时间小于2 μs,并具有稳定准确等特性。
2 DRoF系统中的新型FST-AGC算法
2.1 系统需求和AGC架构
本系统的架构框图如图1所示,上行链路中,远端单元(Remote Unit, RU)中的全向天线接收来自用户的射频信号,射频前端使用多级放大器来补偿射频信号的传输衰减,其中,第1级使用低噪声放大器以降低整个链路的噪声系数。AD9370芯片接收射频前端输出的射频信号并将其转换为基带信号,RU对基带信号进行数字信号处理并打包,通过单模光纤链路传输到近端单元(Access Unit,AU)。AU从接收的光信号中恢复出基带信号并进行数字信号处理,使用AD9370芯片将基带信号射频化。系统的下行链路架构与上行链路类似,即AU接收射频信源并将其数字化后传输到RU,RU恢复出射频信号并完成信号覆盖。然而,由于RU与用户间的距离变化导致上行输入信号强度变化很大,所以系统上行链路需要更高的输入动态范围,本文着重研究系统上行链路的性能。

图1 多服务低速率DRoF系统架构
为实现多服务信号低速率传输,系统对采样数据进行频谱压缩和量化压缩,其中量化压缩包括非线性去除采样数据高位(Most Significant Bits,MSBs)和低位(Least Significant Bits, LSBs)。然而,数据压缩过程中的量化位数减少使得系统的输入动态范围急剧降低。对于模数转换器(Anolog-to-Digital Converter, ADC),每减少一个有效位会降低6 dB的ADC动态范围。所以系统在数据压缩前需进行增益动态调整,使得输入信号强度维持在合适范围内,增加系统的输入动态范围。由于OFDM信号是由多个正交的子载波组成的,各子载波的波峰和波谷相互叠加会使信号幅度变化非常剧烈,这对如LTE-Advanced (LTE-A), 5th-Generation (5G)等通信系统中的AGC设计提出了更高要求[17,18]。因此,设计出的AGC应具有增益快速调整和功率估计准确等特性以满足信号传输质量要求。
理想情况下,如果只在数字域进行动态增益控制,系统的输入动态范围最多只能恢复到数据压缩前的水平。然而在实际中由于受如杂波、基底噪声等因素的影响,动态范围无法达到理想值。因此,有必要增加辅助AGC来动态调整射频前端的增益以增加系统的输入动态范围。本文所提算法使用两级AGC环路来动态调整链路增益,使得系统在实现数据压缩的同时提高系统输入动态范围,且可改善系统信号解调性能(链路具有低EVM值),采用周期内多阈值比较的机制来进行快速稳定增益调整,取名为FST-AGC算法。
2.2 详细设计
FST-AGC算法的逻辑框图如图2所示,该算法包括1个积分模块、1个控制算法模块、1个饱和检测模块、2个增益系数计算模块和1个数字放大模块。积分模块可估计出经过增益调整后输出基带信号的功率值;控制算法模块将功率估计值与阈值进行比较并输出增益控制字;增益系数计算模块根据控制字计算出增益调整值,以此来设定射频前端或数字放大模块的增益值;数字放大模块可调整数字基带信号的幅度;饱和检测模块可实时检测输出信号的功率状态,避免出现信号饱和溢出的情况。从逻辑框图中可以看到该算法包括主AGC环路和从AGC环路等两级增益控制,主AGC环路和从AGC环路分别将数字基带信号和射频信号的幅度调整到合适范围内。

图2 FST-AGC算法结构框图
2.2.1 主AGC环路
如2.1节所述,主AGC环路作用在系统进行数据压缩前,可将数字基带信号幅度调整到合适范围内,使得系统可采用非线性压缩方法实现高的压缩效率,同时系统可以充分利用压缩后量化位数,在进行数据压缩后保持系统输入动态范围基本不变。图3显示了主AGC环路的结构框图,主AGC环路可分为3个阶段:输出信号功率估计、信号状态判定、增益调整值计算。

图3 主AGC环路结构框图
本文所提AGC算法采用负反馈控制方案,在链路增益调整前需要估计出输出信号功率值。准确、稳定和快速的功率估计方法可提高AGC算法的稳定性和响应时间特性。目前大多采用低通滤波器来估计数字信号的功率值。然而,信号长度是影响信号功率估计时间的主要因素,当接收信号变化剧烈或者采样信号个数不够时,便无法获得准确的功率估计值,容易产生环路效应[19]。为快速准确估计信号功率,本文使用了后向欧拉公式,在功率估计时将前一时刻信号考虑在内,表示为

其中,x(n)为当前接收信号,m(n)为当前接收信号的功率估计值,m(n-1)为前一时刻接收信号的功率估计值,fs是采样时钟,K为加权系数。K值可以改变信号功率曲线的平滑度,根据应用场景可选取合适的K值。
而且,本算法采用周期内阈值比较的方案来调整链路增益。控制算法模块包括计数器和阈值比较器,其目的是将输出信号功率值控制在下门限lowa和上门限upa之间。当输出信号的功率估计值超出该范围时,将启动新的控制环路来调整链路增益。本文定义参数comp来表示输出信号功率状态

同时本算法的最小控制周期为TD,当在TD内comp出现1的次数多于判定因子α时,控制算法模块将改变状态调整链路增益,并把增益调整标志位tune置为1,否则,链路的增益保持不变,并把tune置为0,该周期性控制的方法可以避免由于信号不稳定产生的增益抖动。TD和判定因子α取值过大会延长算法的响应时间,这两个参数值过小又会使算法稳定性降低,TD和α的取值需要在算法响应时间和稳定性之间进行权衡。而且控制算法模块在单个TD内只进行1次链路增益调整,采用步步控制、从小到大的方法进行增益调整,增益调整过程一直持续到输出信号功率在要求范围内或在TD内tune一直保持为0。输出信号功率值m(n)与参考值ref之间的对数误差和链路增益调整值呈线性关系,即

其中,µ 是影响增益调整速度的自定义系数,G(n+1)和G(0)是以dB形式表示的增益更新值和增益初始值,公式右侧是以dB形式表示的参考值与输出信号功率值的比值。因此,增益的更新值可由比较结果决定。在主AGC环路中,lowa对应σ量化位数所能表示的最大值,upa对应B-υ量化位数所能表示的最大值,其中α是LSB值,B是ADC的采样位数,υ是MSB值。当 µ=1, upa=(100.5)×ref2,输出信号功率值满足m2(n)≥upa时,由式(3)得,G(n+1)-G(0)=10(lg(ref2/(100.5×ref2)))=-10lg100.5=-5 dB。所以,此时系统链路增益需要至少降低5 dB。当输出信号功率估计值m2(n)≤lowa时,计算方法相同。
与传统的单阈值比较方法不同,本算法采用多阈值比较机制来减少每个TD内的增益调整次数。如表1所示,在控制算法模块中,功率估计值高于upa的信号被划分为7个范围,功率估计值低于lowa的信号被划分为7个范围。在单个判定条件下,如当µ =1, upa=(100.5)×ref2,输出信号功率值满足upa≤m2(n)≤100.5×upa时,由式(3)得,G(n+1)-G(0)=10(lg(ref2/(101×ref2)))=-10lg10=-10 dB,系统链路增益需要至少降低10 dB,增益调整过程一直持续到信号功率值不满足该判定条件,且增益最多调整5次便可将输出信号快速调整到稳定状态,缩短了在不同输入信号功率范围下主AGC环路的响应时间。理想情况下,主AGC环路最大响应时间可表示为

其中,fs是系统时钟。
在系统时钟fs下,积分模块和控制算法模块先后对接收的数字基带信号进行处理并输出增益控制字。增益系数计算模块会根据每个增益控制字按式(3)计算出增益调整值。在主AGC环路中,数字放大器将输入基带信号乘上增益系数,并根据增益调整值对计算结果进行移位完成链路增益调整。

表1 主AGC环路中输出功率值及增益控制对应表
传统的AGC只有增益调整功能,本AGC算法的增益调整值同时被增益系数计算模块和饱和检测模块控制。饱和检测模块可实时检测到输出信号的饱和状态并重置增益调整值,以应对信号变化剧烈的场景。I路和Q路都可检测输出信号是否为饱和状态,以Q路为例,如果I路输出信号的绝对值高于饱和门限,饱和检测模块就判定输出信号处在饱和状态并将饱和标志位idle置为1,否则将idle置为0。当idle为1时,链路增益被设为初始状态,即增益系数计算模块不起控,否则增益系数计算模块工作正常。经过主AGC环路的增益调整后,系统将输出基带信号幅度稳定维持在上下门限范围内,使得后续进行数据压缩而不恶化输入动态范围性能。
2.2.2 从AGC环路
上行链路中,RU通过全向天线接收射频信号并将其输入到射频前端。系统的输入动态范围主要受AD9370的动态范围所限制,如2.1节所述,在AD9370将射频信号转换成基带信号前,从AGC环路可动态调整射频前端的增益,将AD9370的输入信号幅度控制到合适范围内从而增大系统整体的输入动态范围。图4显示了从AGC环路结构框图,从AGC环路的流程与主AGC环路的流程类似,即积分模块估计出输出信号功率值,控制算法模块判定输出信号的状态,增益系数计算模块计算出射频前端的增益调整值。其中,从AGC环路的积分模块、控制算法模块和增益系数计算模块与主AGC环路的相同,2.1节已经对这些模块进行阐述,因此在这一节中重点描述其他模块。
从AGC环路中,下门限lowb和上门限upb对应在AD9370输入动态范围内系统输出信号功率的最大值和最小值。如表2所示,功率估计值小于下门限lowb的的信号被分为2个范围。在单个判定条件下,从AGC环路只需对射频前端的增益调整一次。理想情况下,从AGC环路的最大响应时间为


图4 从AGC环路结构框图
在RU中,射频前端的增益主要来自串联的数控衰减器和两级放大器。射频前端主要器件的参数如增益、P1,3阶互调等如表3所示。从AGC环路将数控衰减器的初始衰减值设为21 dB,采用控制数控衰减器衰减值的方法来动态调整射频前端增益。相比于使用具有同样增益调整范围的VGA,该方案成本更低。从AGC环路的增益值调整范围为从-10.5~21 dB,最小增益调整步进为10.5 dB,系统动态范围可增加30 dB以上。同时,本文可以通过在射频前端串联数控衰减器来继续增加系统输入动态范围。与主AGC环路相同,当输出信号出现饱和状态时,饱和检测模块可重置射频前端增益值。从AGC环路通过粗调整射频前端增益来增大系统输入动态范围,避免大射频信号所导致的AD9370等后端器件的饱和甚至损坏,而且,从AGC环路通过调整前端射频信号强度来增大积分模块的测量范围,提高系统AGC算法的敏感度。
2.2.3 两级AGC
如果只在数字基带部分进行主AGC环路控制,多服务低速率DRoF系统还不能满足输入动态范围要求。然而,只依赖于射频部分的从AGC环路控制将增加系统的硬件成本。因此,本文提出可同时在数字基带域和射频域进行增益调整的新型FST-AGC算法,该算法使系统在充分利用压缩后量化位数的同时不破坏系统对信号的解调性能。该算法采用先进行从AGC环路控制再进行主AGC环路控制的策略,主AGC环路只有在从AGC环路达到控制极限时才工作。所以FST-AGC响应时间的理论值为


表2 从AGC环路中输出功率值及增益控制字对应表
从AGC环路通过动态粗调整射频前端的增益值使得信号幅度尽量靠近主AGC环路控制的目标范围,从而减小后续主AGC环路的增益调整压力。主AGC环路串联在从AGC环路后,在数字基带域对链路增益进行精确调整。FST-AGC算法中的几个重要的参数,如TD, K, α, µ等会影响算法响应时间和稳定性。为使算法更灵活,可将各个参数设为寄存器值,根据应用场景不同来动态改变寄存器 参数值。
3 仿真和实验结果
为了验证FST-AGC算法的性能,该算法被应用到能够同时支持中国3家MONs 14路服务的低速率DRoF系统上行链路中,系统实物图及实验平台如图5所示。该系统各通道的ADC采样时钟为153.6 MHz,采样位数为16 bit,上行链路射频前端使用了单个数控衰减器。如图5所示,系统对采样数据进行了频谱压缩和量化压缩,其中量化压缩模块选取参数σ=0, υ=8,系统的数据传输速率由30.1 Gbps降低到7.4 Gbps,数据传输效率明显优于传统CPRI接口。结合第2节对算法参数的理论计算,FST-AGC算法所选取的参数值如表4所示。本节使用LTE TM3_20 MHz信号对FDD 1800通道上行链路进行测试分析,LTE信号拥有高峰均比的特点,且采用64-QAM高阶调制,利用该信号进行实验测试可以验证算法在极限情况下的性能。采用罗德与斯瓦茨公司(Rohde & Schwarz, R&S)SMW200A作为信号发生器,用R&S FSW频谱仪对输出信号进行分析,实验中使用MATLAB语言编写测试脚本以加快实验进程。

表3 射频前端主要器件参数

图5 系统实验平台架构
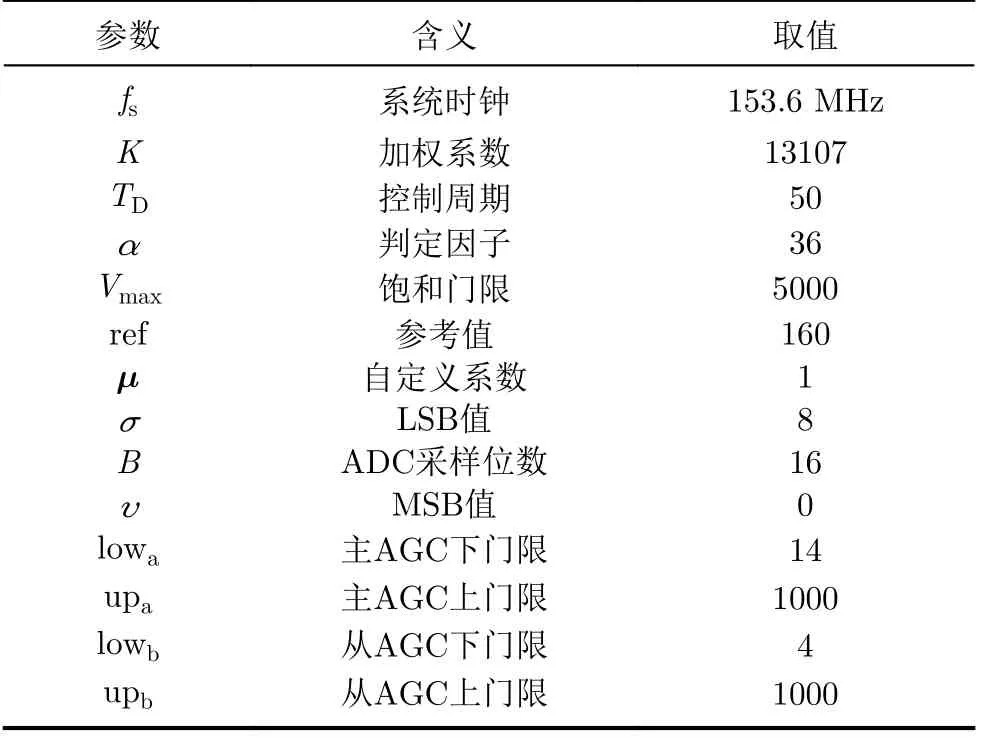
表4 FST-AGC参数取值
系统引入FST-AGC算法后的EVM测试结果如图6所示,为进行比较,经过数据压缩后的传统DRoF系统EVM测试结果及引入单级AGC环路(从AGC环路或主AGC环路)后的系统EVM测试结果也显示在图6中。当输入功率为-75~-3 dBm时,FST-AGC算法可将系统的EVM值控制在5%以下,即系统动态范围能达到72 dB,其中5%是3 GPP规定的EVM标准要求。从图6可以看出,相较于传统处理方法,该算法将系统动态范围提高了30 dB。同时也可以看出,相较于单级AGC,该F S T-A G C 算法可将系统动态范围继续增加10 dB。而且,引入FST-AGC算法的系统EVM值明显低于引入单级AGC环路的系统EVM值,表明FST-AGC算法可以使多服务低速率DRoF系统的信号传输质量得到明显改善。
本文在软件平台vivado 17上实现FST-AGC算法并仿真响应时间特性。因该仿真着重于分析算法逻辑,我们在仿真时使用数字放大器代替从AGC环路中的数控衰减器。系统采集49152个LTE TM3信号数据作为输入信号,如图7中前两行所示,包含功率幅度分别为-2 dBm, -25 dBm,-72 dBm的3段信号。第3, 4行是经过算法调整后的系统输出基带信号结果,系统链路增益的动态放大和衰减值分别如图中第5, 6行所示。从图7可以看出,本文所提FST-AGC算法可以有效动态调整系统的链路增益,可以在2 μs内快速将输出信号功率稳定在合适范围,同时保持系统的稳定性。在本AGC算法中,系统对增益进行6次以内的调整(1次粗调,5次细调)就能使系统稳定下来,TD=50,fs=153.6 MHz,算法响应时间的理论值小于2 μs,多次仿真结果与理论计算结果一致,系统可以在输入信号剧烈变化的情况下快速稳定调整链路增益。

图6 系统在各种条件下的EVM测试曲线

图7 FST-AGC算法的性能仿真图
该算法的所有模块都在FPGA中实现,FPGA芯片采用Xilinx公司的Kintex 7系列XC7K325T。该算法中的数字放大器采用移位的方法来实现,其并不需要复杂的数学计算,主AGC环路和从AGC环路中的大部分模块都是共用的,也就是说相较于单级AGC环路,两级AGC不会增加算法实现复杂度或增加占用的逻辑资源。实验结果表明,该算法使用了130个自适应查找表(Adaptive Look Up Tables, ALUT)和102个寄存器,优于其他同类型AGC算法。在本系统中,FST-AGC算法采用高精度增益控制,如果控制精度要求降低,增益控制字的数量会相应减少,硬件资源的使用量也会继续降低。
4 结论
本文提出了一种可应用于多服务低速率DRoF系统中的FST-AGC算法,本算法通过动态链路增益调整使得系统ADC量化位数得到充分利用,以便系统进行深度数据压缩。仿真及实验结果表明,该算法通过采用有效的周期性多阈值判断的方法,可在小于2 μs的响应时间内快速稳定准确地调整链路增益。该算法采用两级AGC环路控制方案可将多服务低速率DRoF系统的动态范围提高40 dB以上,同时改善信号传输质量。本算法可应用在对响应时间要求严格的各类无线通信系统中。
