直升机卫星通信系统信道模拟与通信实现*
2021-04-25张志科朱铁林
张志科,朱铁林,宋 哲
(天津航天中为数据系统科技有限公司,天津 300457)
0 引 言
直升机具有快速、机动灵活、不受地理条件限制等优点,在救灾过程中作为空中救援平台,得到了大量应用[1]。目前,直升机的通信手段主要依靠短波和超短波,短波受电离层大气传播条件变化影响大,超短波限于视距通信、易受高山遮挡、多径效应等因素影响,通信距离有限。卫星通信具有不受陆地环境影响、通信范围广等优势[2],可有效解决上述问题,但是直升机卫星通信还未广泛应用,主要受限于直升机旋翼对卫星信号遮挡导致通信链路中断[3-5]。
目前,有很多人在直升机卫星通信抗旋翼遮挡方面进行了研究。王健等人[6]提出一种改进的低密度奇偶校验(Low Density Parity Check,LDPC)译码算法,并经过仿真证明对已知遮挡和预知遮挡译码性能都有一定提高。罗飞腾等人[7]建立了周期性删除信道模型,讨论了重发模式与系统设计的关系,得出两次重发可在大多数遮挡信道下实现可靠通信,并且具有很好的灵活性和较低复杂度。董孝东[8]阐述了旋翼遮挡对信号的影响,并介绍了几种前向链路克服旋翼遮挡的方法。姚国义等人[9]提出前向链路反馈地面信噪比的方法优化缝隙检测,并仿真可行。汤明文[10]提出一种前向链路采用时间发射分集,返向链路采用基于信号功率的缝隙检测,在无遮挡间隙进行数据回传的方法,并经过仿真证明了方案的可行性。阮先丽等人[11]根据实际飞行情况,发现缝隙检测算法漏洞,并提出了优化方法。魏瑞刚[12]设计了一种频率跟踪和相位跟踪方法,可消除多普勒频偏,并经理论推导和仿真证明有较高的频率跟踪精度。
本文在前人研究成果的基础上,采用射频收发器AD9361模拟了信道周期性衰减特性,在现场可编程门阵列(Field Programmable Gate Array,FPGA)上实现缝隙检测算法,并在此基础上设计了一套直升机卫星通信方案。该方案不受直升机机型限制,在40%遮挡率下能实现前向链路25.6 kb/s和返向链路4 Mb/s速率下的可靠通信。
1 直升机卫星通信旋翼遮挡信道模拟
在直升机卫星通信系统中,准确地模拟出因旋翼遮挡导致的信道周期衰减特性是后续系统设计的关键。衰减周期与直升机旋翼转速、桨叶宽度和数量有关,典型的机型遮挡周期为47±3 ms和62±3 ms[7],遮挡时间大概在10 ms。L频段的仿真和实验数据表明,旋翼遮挡衰减超过8 dB的概率可达20%,衰减超过20 dB的概率约3%[7]。根据文献[7],Ku频段因遮挡造成中断比例最坏情况下可达35%,Ka频段遮挡造成的衰减将更宽更深。
本系统中模拟了一个遮挡周期为40 ms、遮挡时间分别为8 ms(20%遮挡率)和16 ms(40%遮挡率)的遮挡模型,发送端控制射频发射器AD9361的发射功率,在前一半遮挡时间内每0.5 ms衰减增加4 dB,后一半时间内每0.5 ms衰减减少4 dB,这样20%遮挡率的最大衰减可以达到32 dB,比真实情况更严格,在Vivado上在线采样20%遮挡率情况下接收端接收到的信号如图1所示。
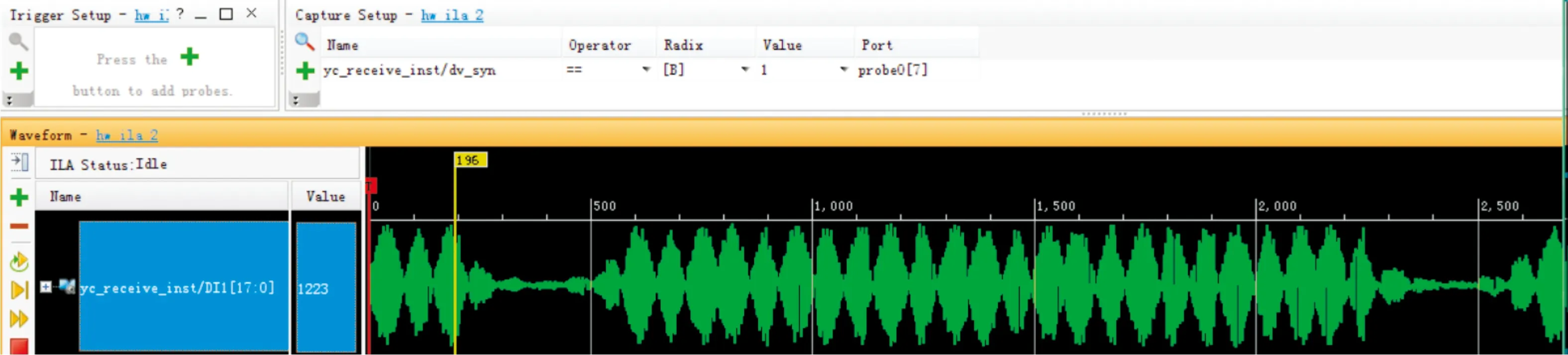
图1 遮挡信道模拟图
系统的码片速率为6.875 Mb/s,采样间隔为128个码片,可见在衰减增加12 dB后信号已经很小,无法正常解调。通过此方法模拟的信道衰减特性更接近真实情况,甚至比真实情况更加严格,为后续缝隙检测算法实现和系统设计提供了硬件验证平台。
2 缝隙检测算法优化与实现
缝隙检测算法是直升机卫星通信中最重要一环,缝隙检测结果是前向链路分集接收的依据,同时也是返向链路在无遮挡缝隙传输数据的依据。因此,能否有效检测出遮挡缝隙是直升机卫星通信系统可靠通信的关键。本系统采用的缝隙检测算法在张峰[15]和高凯等人[14]的逻辑框图上进行了优化,并借鉴了阮先丽等人[11]的飞行经验,在快速傅里叶变换(Fast Fourier Transform,FFT)之后加入滤波器,有效防止了误捕获。缝隙检测算法原理框图如图2所示。

图2 缝隙检测算法原理框图
缝隙检测算法进行了两点优化:第一,对解调后的信号非线性变换,而非在AD9361后直接进行非线性变换,因为AD9361下变频后的信号还存在很小的频偏,此频偏会对FFT结果产生严重影响;第二,先进行滤波再进行门限比较,因为测试结果表明,在遮挡开始和结束阶段,FFT峰值提取结果会发生跳变,经过滤波器后可有效滤掉跳变,防止误判。
图3和图4分别为对AD9361下变频后的信号和解调后的信号进行缝隙检测的结果,对比表明后者正确且稳定。

图3 对AD9361下变频后信号峰值检测结果

图4 对解调后信号缝隙检测结果
由图3 可见,频偏的存在导致FFT计算的信号功率随之周期变化,无法有效提取出旋翼遮挡参数。由图4可见,解调后的信号有效消除了载波频偏,检测结果稳定正确。根据缝隙检测结果,可有效得到前向链路旋翼遮挡周期、遮挡时间和返向链路无遮挡时间,为链路可靠通信提供保障。
3 系统设计
在解决信道遮挡模型和缝隙检测算法等关键技术问题后,根据前向链路和返向链路的数据速率和带宽要求,制定了一套直升机卫星通信系统通信方案,即前向链路采用重发和分集接收及短码LDPC编码技术,返向链路采用在无旋翼遮挡缝隙突发通信和长码LDPC编码技术。要求系统可适应大多数直升机机型,并在6.875 Mb/s码片速率(12 MHz带宽)和40%遮挡率下,实现前向链路25.6 kb/s和返向链路4 Mb/s速率下的可靠通信。
3.1 前向链路设计
直升机卫星通信系统中前向链路传送遥控指令,遥控指令对速率要求较低,但对安全性要求较高,无人直升机在一定时间内如果一直收不到遥控指令将进入失控保护状态。针对这些特点,本设计中前向链路采用地面站对数据进行重发,机载端分集接收,并采用短码LDPC编码技术确保链路稳定可靠。
3.1.1 重发机制设计
重发和分集接收设计方案需满足大多数机型的要求,因此重发的时间设置尤为重要。本设计中采用二次重发,兼顾灵活性和安全性,同时节省资源[7]。在评估系统设计是否满足要求时遵循两个原则:一是重发帧时间与原始帧时间之和小于旋翼遮挡周期,但要接近旋翼遮挡周期;二是原始帧时间大于旋翼遮挡时间,并大得越多越好。第一条原则可保证在一轮发送时间内只发生一次遮挡,第二条原则可保证每次遇到遮挡时都可以分集接收到有用信息。
本设计中重发原理框图如图5所示。原始帧和重发帧一共包含16组,每一组中包含16个时隙,每个时隙长度为1 024个码片;前8组为原始帧后8组为重发帧,重发帧和原始帧发送的数据完全一致;原始帧和重发帧的第一组前两个时隙发送不同的同步伪码,通过两个伪码的不同来区分是原始帧和重发帧。
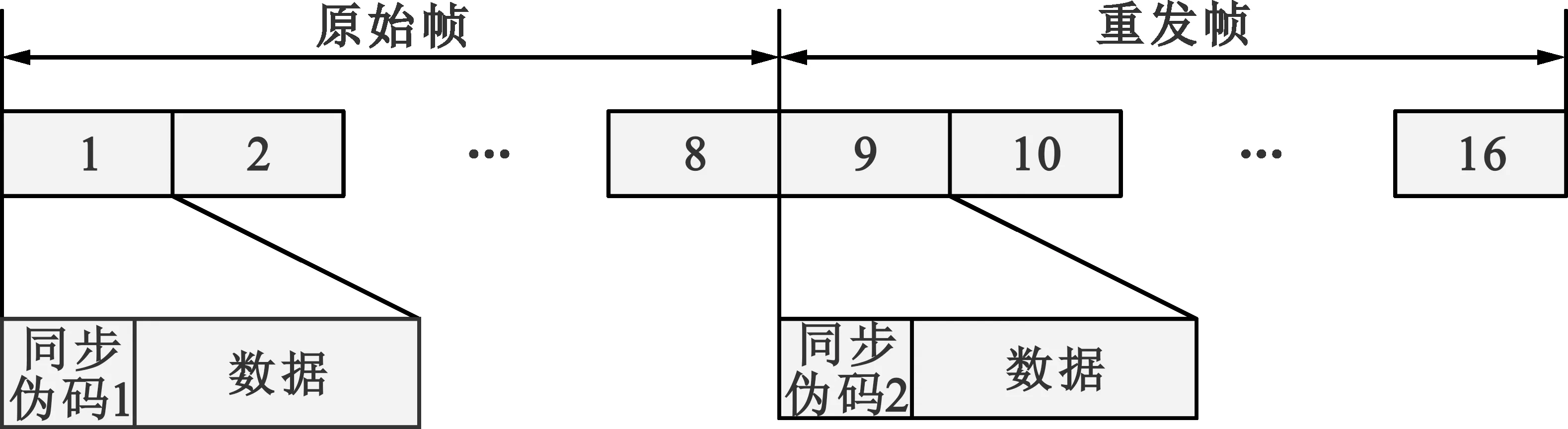
图5 前向链路重发原理框图
记To为原始帧时间,Tr为重发帧时间,系统码片速率为6.875 Mb/s,记Tc为每个码片时间,因此,
To=Tr=8×16×1024×Tc=19.07 ms 。
本设计中设置旋翼遮挡周期为40 ms,旋翼遮挡时间分别为8 ms(20%遮挡率)和16 ms(40%遮挡率)。根据系统设计的两个原则,To+Tr=38.14 ms <旋翼遮挡周期,To=Tr>旋翼遮挡时间,可见重发方案满足要求。
3.1.2 前向链路速率计算
前向链路速率由系统设计决定,与遮挡率无关。本系统设计中码片速率为6.875 Mb/s,采用QPSK调制、二次重发机制和3/4 LDPC编码,因此前向链路速率计算公式为
式中:256表示一轮发送一共256个时隙,126表示一轮发送时隙中发送有效数据的时隙,2表示QPSK调制,3/4表示3/4LDPC编码,N为扩频倍数。
当Vf为25.6 kb/s时,计算得扩频倍数为200,可见满足前向链路速率25.6 kb/s要求,且扩频倍数足够。
3.1.3 分集接收机制设计
机载端根据缝隙检测的结果对原始帧和重发帧分集接收,分集接收的原理为在原始帧和重发帧中找出无遮挡帧并正确接收,原理框图如图6所示。对每一轮接收时隙进行检测,如果本组帧中发生遮挡,记录其编号,一轮检测结束后将无遮挡时隙组结果输出。
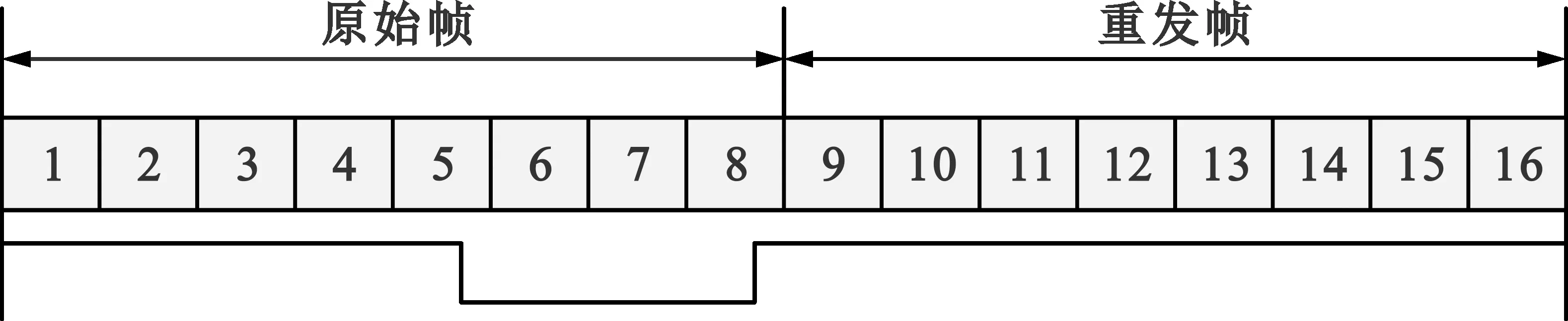
图6 分集接收原理框图
输出结果时,应尽量舍弃遮挡结束后的几个时隙组,因为由于遮挡导致这几个时隙组接收不稳定,如图6所示,在5、6、7、8时隙组发生遮挡,因此应输出1、2、3、4、13、14、15、16时隙组的结果。
3.1.4 短码LDPC码长设计
LDPC编码技术是一种特殊的线性分组码,并具有天然的交织特性,非常适合抗遮挡[6]。LPDC码长的设置是系统设计需要考虑的重要因素,码长太短不利于抗遮挡,码长太长会引入很大的系统延时,因此需根据遮挡周期设置LDPC编码的帧长。LDPC帧长应大于等于系统速率和遮挡周期的乘积,可保证每个LDPC帧中大部分数据正确。本设计中,前向速率为25.6 kb/s,遮挡周期为40 ms,因此短码LDPC的帧长设置为1 024 b。
3.2 返向链路设计
直升机卫星通信系统中返向链路传输内容包括图像、载荷以及遥测信息等,因此返向链路速率较快,重发和分集接收带宽利用率低,不适合返向链路。本系统中采用无遮挡缝隙突发通信和长码LDPC编码,实现返向链路正常通信。
由于下行速率为4 Mb/s,在进行LDPC编码码长设计时不必遵循前向链路的数据方法,因为返向链路已经没有遮挡的概念,如果还是按照前向链路LDPC码长设计,将引入很大系统时延。
根据缝隙检测结果,可以确定遮挡周期和无遮挡时间。记无遮挡时间为Tf,根据无遮挡时间可以计算出发送时隙数,记为N,则
N=Ff/Tc/1024。
计算出返向发送时隙数后,可进行返向链路时隙划分。返向链路时隙划分中最重要的问题是如何让接收端知道起始时隙和结束时隙。文献[15-16]提出通过在头部插入前导频和在尾部插入后导频的方法解决起始和结束的问题。此方法虽然可行,但是接收端在没有收到后导频之前需对数据进行缓存,消耗缓存资源,同时引入系统延时。本设计中,返向链路时隙划分如图7所示,前两个时隙为导频,用于确定本次通信的开始,3、4时隙发送训练序列,用于信道估计和均衡,5、6时隙发送本次突发通信要发送的时隙数目。用两个时隙发送时隙数目,可保证很高的扩频倍数,相对保证安全性,后面的时隙进行数据传输,接收端可直接将数据输出,无需缓存,不会引入系统时延。

图7 返向链路时隙划分
接收端接收到前导频后开始接收,经过信道估计和均衡后提取本次通信时隙数目,然后开始数据接收,直到本次通信结束。接收流程如图8所示。
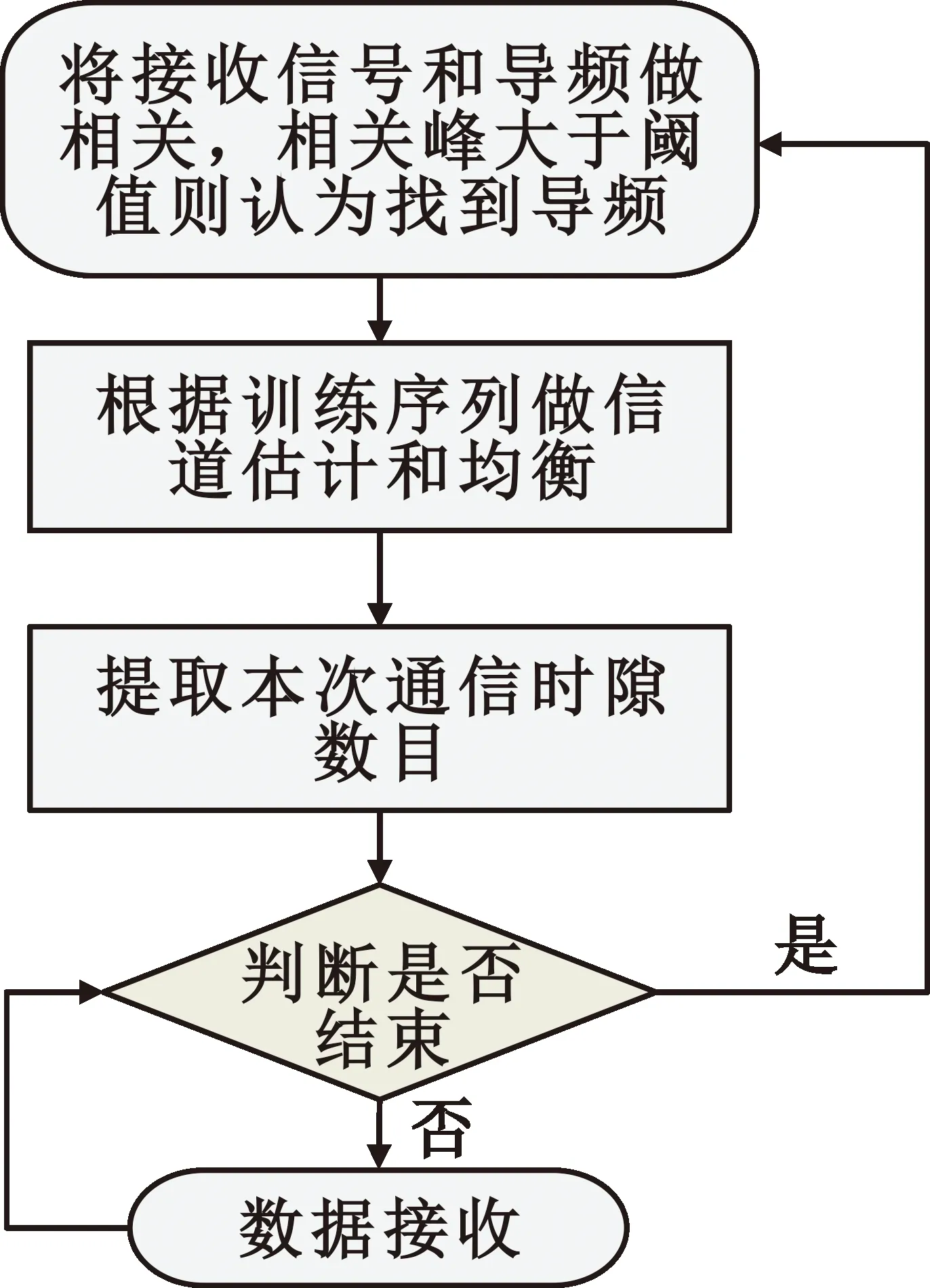
图8 接收端接收流程
4 系统测试
系统测试旨在验证缝隙检测算法、前向链路重发和分集接收技术和返向链路无遮挡缝隙突发通信是否正常稳定工作,因此卫星链路用L频段代替,前向链路1 640 MHz,返向链路1 340 MHz。本系统测试中搭建了一套回环测试环境,原理框图如图9所示。
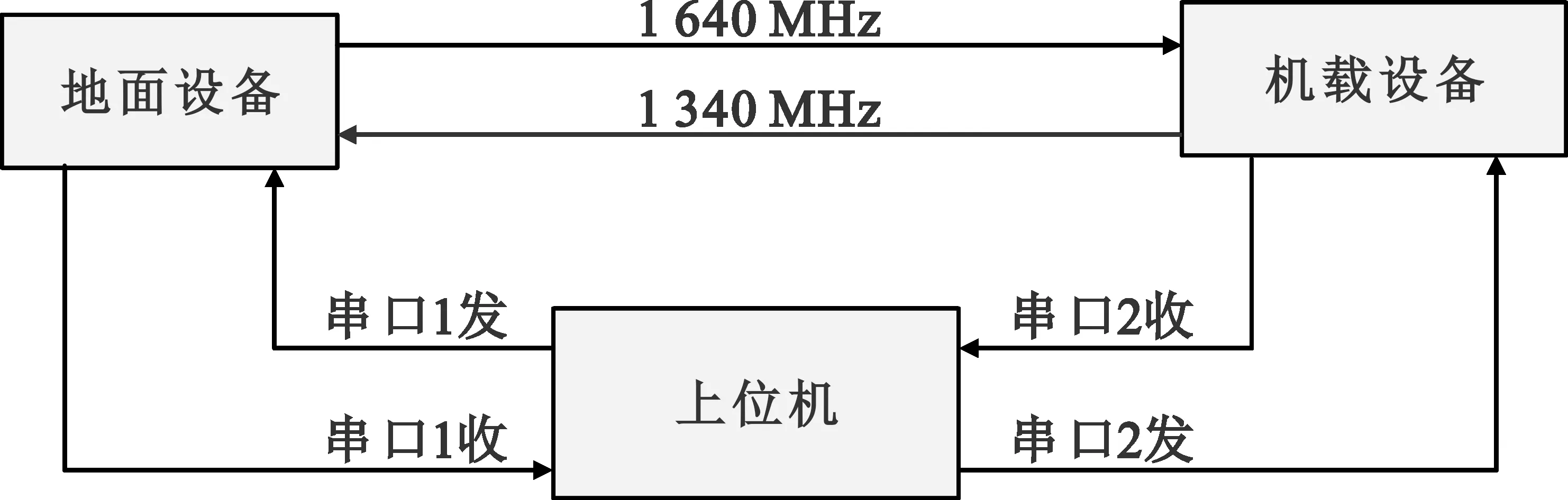
图9 系统测试框图
编写上位机测试软件。上位机模拟前向链路遥控数据,遥控数据以帧的形式发送,每帧数据中包含帧计数和CRC校验,通过串口1发送给地面设备,模拟遥控数据经过前向链路后到达机载设备,然后通过机载设备上的串口2返回给上位机;上位机测试软件通过帧计数和CRC校验判断数据的正确性和连续性,完成前向链路测试。同时上位机模拟下行遥测数据,遥测数据同样以帧的形式发送,每帧数据中包含帧计数和CRC校验,通过串口2发送给机载设备,模拟遥测经过返向链路后到达地面设备,然后通过地面设备上的串口1发送给上位机;上位机测试软件通过帧计数和CRC校验判断数据的正确性和连续性,完成返向链路测试。经过长时间拷机测试,系统工作稳定,测试结果如图10所示。

图10 系统测试结果
系统测试结果表明,测试75万帧数据,无错误,系统工作稳定。
5 结束语
本文首先解决直升机卫星通信中的旋翼遮挡导致的信道周期衰减和缝隙检测算法两个关键问题,信道的周期衰减特性采用射频收发器AD9361模拟,更接近真实情况,更加直观,有利于后面系统设计和验证;缝隙检测算法在FPGA上实现并进行了优化,检测结果更加稳定。基于以上结果,设计并实现了一套直升机卫星通信方案,即前向链路采用重发和分集接收及短码LDPC编码技术,返向链路根据前向链路缝隙检测的结果在无遮挡缝隙采用突发通信和长码LDPC编码技术。前向链路设计中总结了原始帧和重发帧与遮挡周期和遮挡时间的关系以及短码LDPC帧长与遮挡周期和遮挡时间的关系;返向链路设计中设计了一套突发通信时隙结构,在通信过程中传输本次通信的时隙数,使接收端接收更加简单。经过拷机系统测试,系统运行稳定。但系统还有一点不足,即系统只是在实验室硬件平台上通过验证,后续还需经过多次飞行试验,证明其稳定性。
