全自动独立加码杠杆式力标准机的研究
2021-04-25郑辉,张涛,王鹏
郑 辉,张 涛,王 鹏
(天津市计量监督检测科学研究院,天津300192)
力标准机作为检定各种测力仪负荷特性的标准计量器具,是各级标准测力仪器中力值准确度最高的一种,它的各项性能指标决定了整个测力行业的准确度。杠杆式力值标准机是力学计量标准装置之一[1],它是以砝码的重力作为标准负荷,经过一定的杠杆机构放大后按预定顺序自动平稳地加到被检测力仪上的力标准机。杠杆式力标准机往往容易得到更大的力值。
杠杆式力标准机在力值行业普遍使用,但其存在加载过程缓慢、杠杆配平复杂,工作效率低下等问题,本文提出全自动电动独立加码杠杆式力标准装置,提供一种全自动配平、独立加码、快速加荷,便捷校准的高准确度杠杆式力标准装置,旨在探索改进杠杆式力标准机的不足之处,从而对传统杠杆式力标准机进行结构上的突破,研制效率高、精度高、可靠性高、操作方便的小力值标准装置,有效解决小力值传感器的校准工作中的问题。
1 设计方案及工作原理
1.1 工作原理
杠杆式力标准机的原理同静重式力标准机的原理一致,也是根据力的动力学效应,直接利用已知质量砝码的重力来复现基准力值,将复现的力值通过一定的杠杆比进行放大。根据牛顿第二定律,并考虑空气浮力的影响,质量为m 的砝码在空气中的重力f 为

式中:g 为砝码所在地的重力加速度;ρα为砝码所在地的空气密度;ρω为砝码材料密度。
由于地球上固定地点的重力加速度是一个常数,对于确定的砝码质量,在空气密度和砝码材料密度不变的情况下,重力是固定不变的,重力是目前最准确的力源。因此,通过重力来复现力值的杠杆式力标准机,其将砝码的重力通过杠杆比放大后加载到被检测力仪上,在原理上是合理可靠的。
1.2 设计方案
2 kN 杠杆式力标准机由两部分组成:主机部分(主机机架、反力框架、砝码、吊挂、驱动机构、移动横梁、杠杆机构、配平机构等)和控制部分(伺服电机、可编程控制器、计算机软件系统等),如图1 所示。其中主机部分是实现对被检测力仪测试的机械装置,其核心是砝码组以及砝码驱动机构,每一块砝码都由2 个伺服电机通过砝码托盘来独立控制,通过控制不同砝码组来进行载荷的自由组合;杠杆机构通过配平机构的自动调平功能,使杠杆机构和工作部件可以达到快速平衡,避免了传统杠杆机复杂繁琐的人工调平。
控制部分是由计算机软件系统和PLC 为主要控制元件的控制装置,是砝码执行动作的关键。通过PLC 控制过程的读写,伺服控制单位由伺服驱动器和伺服电机构成,伺服驱动器通过计算机输入设备,获取指令控制伺服电机,驱动砝码区的加载与卸载,同时通过接近开关进行系统平衡调节控制,控制行为通过主界面操作人员可以简单操作完成整个校准过程的实现。
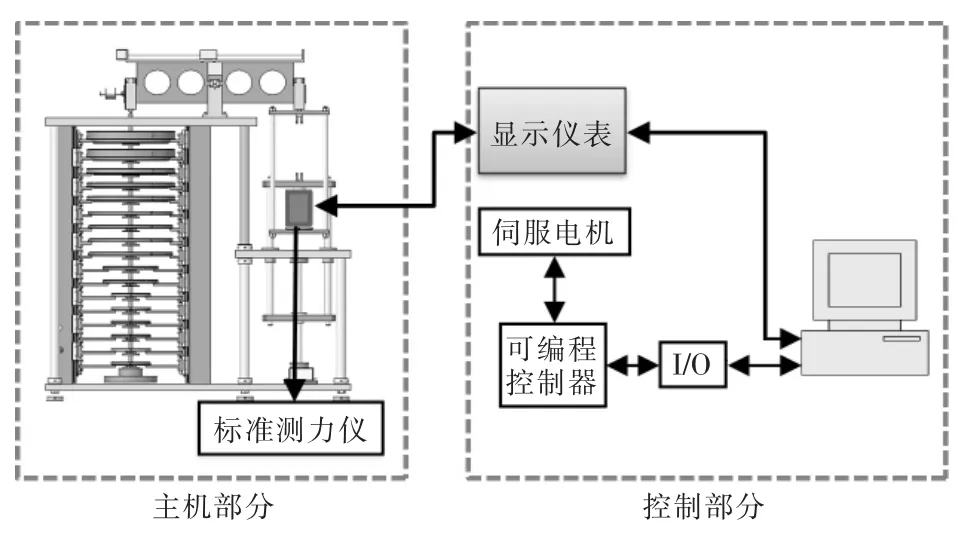
图1 2 kN 杠杆式力标准机组成示意图Fig.1 Composition diagram of 2 kN lever-type force standard machine
2 关键技术
2.1 主机机构
主机机构主要由四部分组成:主机机架、杠杆系统、反力框架和移动横梁。主机机架采用四立柱结构,加工时充分考虑两边的同步性,保证足够的刚度和强度。反力框架和移动横梁是力标准机安装被检测力仪的工作部位。移动横梁驱动机构采用高精度丝杠、螺套和同步带,由电机驱动,保证移动横梁上下移动的两边同步性。反力框架通过杠杆系统将工作区与砝码系统连接,实现主机的整体性。
2.2 砝码与吊挂
该杠杆式力标准机砝码总重量为2000 N,共17块,砝码配置如下:6 块20 N、2 块40 N,4 块100 N,3 块200 N,2 块400 N,通过不同的砝码自由组合,将实现最大限度的负荷级数,最大限度细化载荷级数,满足不同检定点的载荷要求。
该杠杆式力标准机的吊挂通过设计,与被检区的反力框架重量基本一致,使空载情况下杠杆两侧达到大致平衡,使自动调平实现快速化,其中,吊挂材质为铝合金,而砝码材质为304 不锈钢,并经过消磁和热处理表面镀硬铬以达到防腐和耐磨,最终确保力值可长期保持恒定。
2.3 砝码驱动机构
电动独立加码是通过单独的驱动机构执行每一块砝码的加卸动作,具体是以伺服电机和减速器作为驱动砝码加卸载机构,工作原理如图2 所示,由电动机驱动凸轮机构转动,带动托架(滑块)做垂直升降运动,从而提升或降落托架上的砝码。当托架升降时,砝码随之升降,实现砝码在中心吊杆上的加载与卸载[2]。
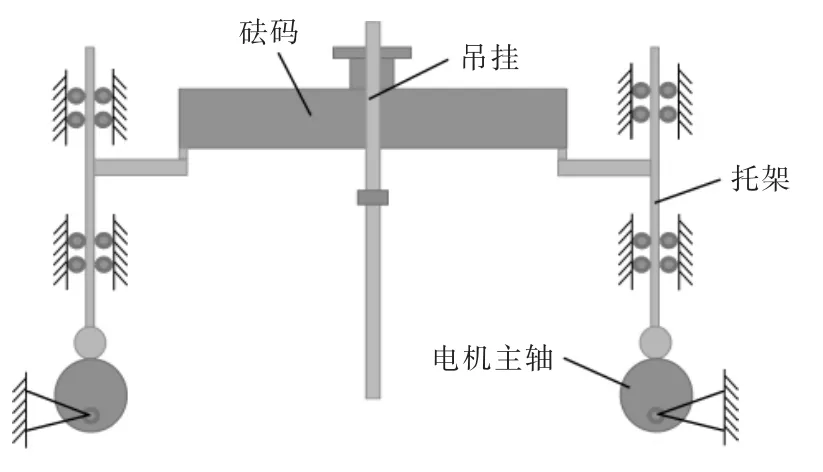
图2 砝码驱动系统Fig.2 Weight drive system
对于电动独立加码方式,每块砝码加卸动作均由电动机控制。托架的行程取决于凸轮的偏心量,升降的速度取决于电动机的转速。因而通过适当的控制方法,实现砝码快速、平稳加卸,多层砝码可以根据需要同时或者单独工作,或者按照预设程序加卸载。
2.4 计算机软件控制
计算机软件系统主界面十分简洁,操作具有手动、半自动和自动3 种模式,具有检定所需要的全部功能。在示意图状态显示框中观察,是否显示设备状态正常(正常状态即初始状态为移动横梁在下位,砝码被砝码托盘托起-呈绿色,每块砝码两边限位标志为上显示红色,吊挂底部的防摆轮松开)。如果正常点击右边工作栏里的“启动”按钮直接进入加载模式,否则点击“进入手动控制”开启“手动控制面板”如图3 所示,根据当前设备状态通过“反力框架”栏下的合上和断开,调整杠杆的位置配平,通过“砝码”栏下的“加载”和“卸载”,控制砝码的驱动。
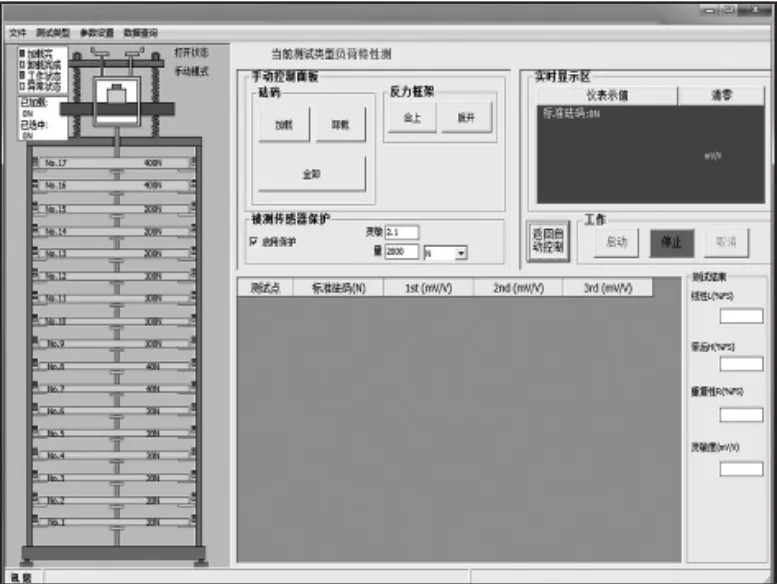
图3 手动控制界面Fig.3 Manual control interface
3 性能测试
依据JJG 734-2001《力标准机检定规程》的相关要求对本2 kN 杠杆式力标准机进行力值性能测试。性能测试实验使用0.01 级标准测力传感器及精密数字测量仪DMP40,负荷点覆盖了2 kN 杠杆式力标准机的全量程范围(40~2000)N。
将标准测力传感器正确安装在力标准机上,对其施加3 次额定预负荷,第三次预负荷逐级施加。在标准测力传感器初始安装位置上(0°)重复测量3次,再转动测力仪,在相对初始位置的90°、180°和270°的方位上进行测量。力值重复性R 和示值误差δ 分别由式(2)、式(3)计算得到:

式中:X0max,X0min,X0为在本机同一负荷下,标准测力传感器在0°方位上的输出最大值、 最小值和平均值;Xs为检定前和检定后,标准测力传感器在力基准机的某个负荷下,两次定度所输出的平均值;X 为在本机同一负荷下,根据标准测力传感器在0°方位上测出的第一次输出与90°、180°、270°方位上得到的输出平均值[3]。
测试结论如表1 所示。
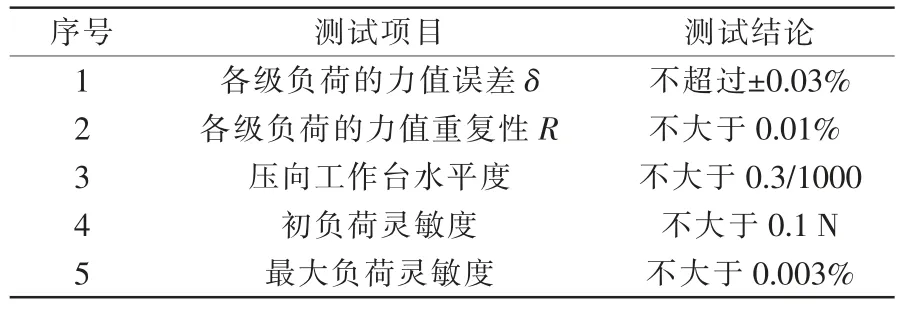
表1 性能测试项目及结论Tab.1 Performance test items and conclusions
通过对测试结论的判断,该2 kN 杠杆式力标准机满足JJG734-2001《力标准机检定规程》的要求,符合0.03 级。
4 结语
全自动电动独立加码杠杆式力标准装置,采用了全新的设计理念和先进的全自动独立加码、自动配平等关键技术,每一个砝码都由2 个伺服电机通过砝码托盘来独立控制,通过控制不同砝码组来进行载荷的自由组合,而杠杆部件通过平衡坨的自由移动实现自动平衡调节,使杠杆部件和工作部件可以达到快速、便捷平衡,避免了复杂繁琐的人工调平及逐点加荷,同时计算机软件系统的多种模式控制确保整机操作的准确无误。整机经过性能试验测试,验证了力值重复性和示值误差都控制在0.03%以内,测试结果表明整机的准确度满足杠杆式力标准机0.03 级的计量指标要求,符合预期设计目标。