无人机载三维激光测绘在农房一体化中的应用
2021-04-25吴松
吴 松
(安徽省地质矿产勘查局311地质队,安徽 安庆 246003)
推进农村房地一体的不动产登记确权工作是党中央全面深化农村改革、统筹城乡区域发展的重要举措,是保障农民基本权益、维护农村社会稳定、实现乡村振兴战略的基础性工作[1]。但受农村地籍调查工作基础薄弱、权源资料不全的影响,农房外业调查工作任务繁重。采用无人机载三维激光雷达系统,仅需搭载有三维激光扫描测距仪、动态差分全球定位接收机、惯性导航装置的无人机按设计路线飞行就可连续、快速、自动获取高精度的地球空间点云数据[2],再结合室内激光点云数据处理即可完成地籍、建筑的测量工作,具有采集速度快、数据精度高、三维信息丰富等特点,极好地弥补了传统测绘方法的不足。
1 数据采集与处理
1.1 应用区概况
连州市地处南岭核心地带,北、东、西三面环山,中部稍低为丘陵,山地约占总面积的72%,丘陵约占16%,境内最高峰天堂岭海拔1 712 m,其余山岭海拔多大于1 000 m。市北部三水瑶族乡总面积137.21 km2,总人口为3 462人,辖32个村民小组,为典型的山地丘陵、农房分散地。2018年,在对三水瑶族乡采用“图解法+简易法”进行农村房地一体化确权登记工作中,选择海达ARS-100无人机载三维激光雷达进行宗地数据采集。航线间距200 m,航高控制在100~200 m,扫描角控制在30°,航行速度控制在40~50 km/h,航向重叠度控制在60%~70%,旁向重叠度控制在50%~60%,“Z”字形线扫描方式,扫描总时间23 d,并采用RTK(Real-time kinematic,实时动态测量)采集乡镇广场、大坝、道路交叉口等特征点的三维坐标对激光数据精度进行校核分析。整个工作流程大致可分为航线设计、外业数据采集、数据处理、精度分析四个部分。
1.2 外业数据采集
外业飞行前,收集整理测绘区域1∶10000地形图,整合农村房地台账,基于Google Earth数据建立地形三维模型,并设计飞行计划,确定飞行航线、航速、航高、起降位置、重叠度、采集点密度的参数要求[1]。实地测绘前,预先对测绘区域进行实地踏勘,掌握地形地貌特征、植被覆盖等情况,并在乡镇广场架设GPS基准站以对机载动态差分全球定位接收机测定的三维坐标进行误差校正。选择晴朗无风或微风天气作业,提高点云测量精度。数据采集时,分别针对农房聚集区和耕地空旷区采用垂直交叉飞行和平行飞行的模式,以实现高效率测绘的同时对农房各立面的全部控制,保证测绘精度。无人机扫描时,操作人员实时对其航速、航高、姿态参数进行动态监测,并根据地形与天气变化调整无人机的飞行参数以保证数据采集可靠性。
1.3 数据处理
无人机载三维激光雷达测绘数据处理关键工作包括数据预处理、点云数据滤波、异常点滤波、地物分类提取等四个部分[2]。其中数据预处理工作是将机载点云原二进制数据转换成标准格式,然后对点云数据的三维坐标基于地面基准点三维坐标进行定向校准,最后拼接航带数据并纠正重叠带高程。点云数据滤波是生成DEM(Digital Elevation Model,数字高程模型)、特征提取、地形重建的关键,其算法有数学形态学滤波法、基于表面的方法、基于分割的方法以及逐渐加密的滤波算法等[3]。本次采用的是渐进窗口尺寸的数学形态学滤波算法,由小到大渐进式对点云数据进行滤波处理以良好保留建筑、农田与地形的细节,提高农村房地不动产登记的精度。异常点滤波是基于1∶10000地形图的高程数据,建立各区块的高程阈值与高程差阈值,以对点云高程数据进行异常点筛查,本次是基于点云处理软件CloudCompare插件对点云数据区域分割后的每一区块数据设置阈值来实现的。地物分类提取是利用渐进三角网滤波算法分离地面点与非地面点,然后设计农作物、乔木等植被的高程阈值对其进行分离,最后基于数学形态学算法提取建筑物。最终,将点云三维空间数据导入CASS地形地籍成图软件中,按照1∶2000比例尺抽稀并勾绘1 m等高距的等高线,完成地形图编绘,以支撑宗地界线和房屋图形的确定登记工作(图1)。
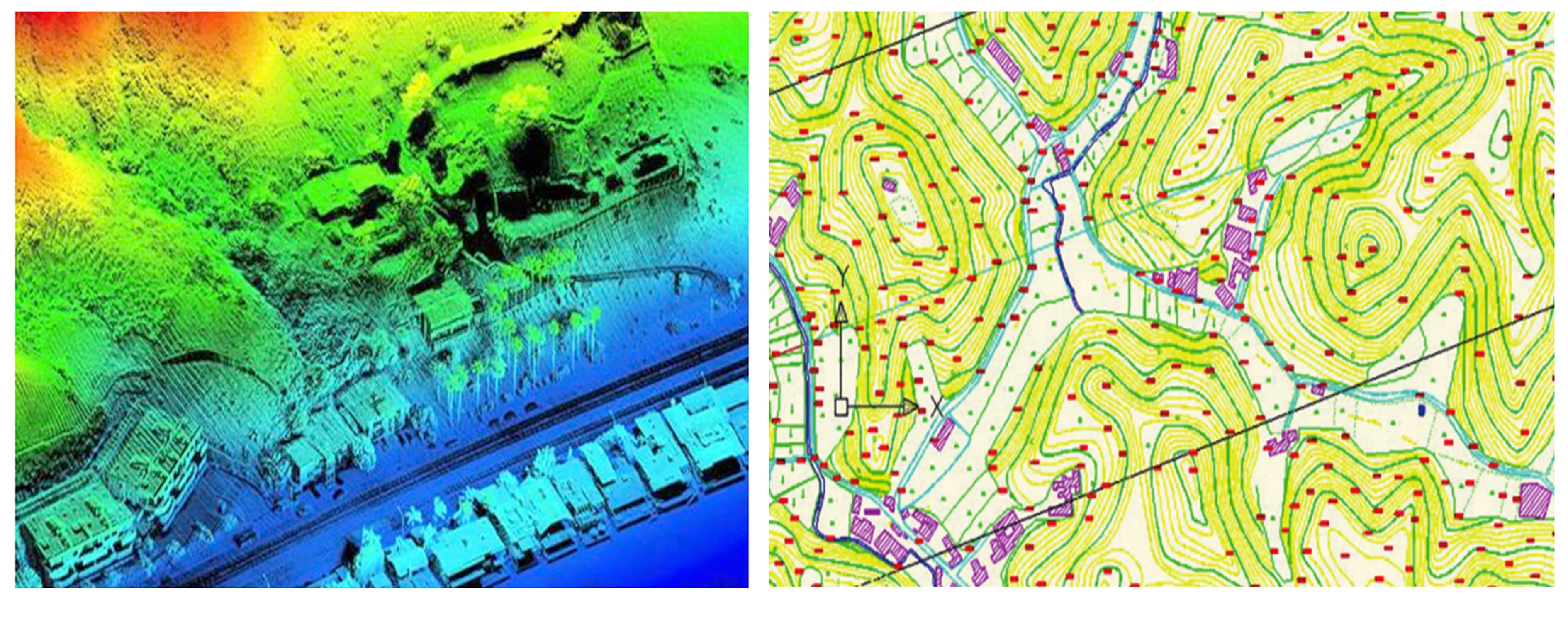
图1 07图幅原始激光点云数据成果图(左)与基于点云数据编绘的地形图(右)
2 精度分析
2.1 点云质量
点云质量主要体现在点云密度。点云密度是指点云覆盖单位面积内的点云数,本次对测绘区均匀选取34块区域(2 000 m × 2 000 m),按公式(1)计算的点云密度平均值7.5 点/m2,高于“1∶2000点云密度≥1”的要求,说明点云质量较高(图2)。

图2 点云密度分布曲线图

(1)
式中:ρ为点云密度平均值,点/m2;n为点云点数,点;A为点云覆盖面积,m2;m为区块数。
2.2 点云精度
点云精度包括点云高程精度和点云平面精度,是基于设置于平坦区域的野外实测点三维坐标数据与激光点云三维坐标数据联合计算的中误差,其计算如公式(2)。
(2)
式中: ΔZ为中误差;n为检查点个数;Zi为地面实测点坐标;Zj为与地面实测点对应的激光点云数据坐标。
本次按2 000 m×2 000 m左右的分幅标准对测量区域进行了似等面积特征点选取共32个,并采用GPS-RTK进行了实地三维坐标测量,测量结果同点云进行对比,部分结果见表1。计算结果显示,平面位置中误差为±0.22 m,中误差最大值为0.28 m,高程位置中误差平均值为±0.093 m,中误差最大值为±0.158 m,误差符合1∶2000航空摄影测量相关规范及农村房地一体不动产登记确权工作的精度需求。

表1 部分特征点三维坐标与点云坐标误差对比表
3 结束语
无人机载三维激光雷达测绘技术较传统的全站仪、RTK等测绘方式具有测绘时间短、采集速度快、数据精度高、三维信息丰富、经济效益好等优点。在当前农房外业勘丈工作任务繁重、工期紧张的背景下,加强无人机载三维激光雷达系统在山地丘陵、农房分散地区的农村房地一体不动产登记确权工作中的应用是必要的。
