列车车轮三维结构光检测中的点云处理研究
2021-04-24庄仁诚黄运华
庄仁诚,陈 鹏,傅 瑶,黄运华
(1.西南交通大学机械工程学院,四川 成都 611756; 2.哈尔滨工业大学机电工程学院,黑龙江 哈尔滨 150080)
0 引 言
列车轮对作为转向架中的关键零部件,承担着铁道车辆的全部重量,它在轨道上高速运行,在承受着从车身和轨道传递来的静作用力和动作用力的同时,还受到自然条件的影响。这将会导致车轮踏面、轮缘的磨耗,同时可能出现踏面的剥落、擦伤、局部变形、辗宽以及粘有熔融金属等问题,从而降低了车辆的运行性能,甚至使轮对报废。
根据《铁路客车轮轴组装检修及管理规则》[1]的要求,新造列车轮对在制造完成投入使用之前需进行整体检测。同时,考虑到运行过程中轮对可能出现的损伤,需要根据列车的运行公里数及运行周期对轮对进行参数检查。列车车轮的自动检测系统,根据检测过程中列车是否处于运行状态可以分为两类:列车静止,采用便携式传感器进行的静态测量;测量传感器静止,列车相对传感器运动的动态测量。根据检测过程中测量装置传感器与待测车轮是否接触又可以分为测量装置传感器与待测车轮直接接触的接触式测量以及测量装置传感器与待测车轮不接触的非接触式测量两类。
由于接触式测量装置使用过程中的限制因素较多,国内外学者对此类型测量装置的研究较少[2]。非接触式的测量方法主要包括激光测量法[3]、超声波测量法[4]等。超声波测量法易于实现实时检测且测量精度高,受到了国内外学者的关注,但其系统结构较为复杂,安装调试较为困难。现有的使用激光测量法测量列车车轮几何参数的研究,大多以车轮某一断面的参数尺寸来反映整个车轮的参数尺寸[5]。这种以局部代替整体的方式,难以真实反映车轮轮缘踏面的损伤情况,给列车的运行安全带来了隐患。程宏钊[6]提出了一种采用三维光学扫描仪进行列车车轮检测的方案,该方案使用GeomagicQualify软件对列车车轮的三维点云数据进行处理,使用的软件难以集成于列车车轮检测的特定的机电一体化系统中。同时,对于采用三维光学扫描仪进行非接触式测量的方案,考虑到列车轮对本身的整体尺寸较大,因此需要从多个视角对列车车轮的三维点云数据进行采集,这涉及到多视角三维点云数据精确配准的问题。对于多视角三维点云数据的配准,顺序配准方法是最先出现的一种较为简单的方法[7],但是该方法存在严重的误差累积问题。针对这一问题,徐思雨等[8]提出了一种逐步求精的点云配准算法,减少了配准中出现的累积误差。近年来,大量多视角点云配准优化算法不断涌现,包括全局优化整体配准算法[9]、移动平均算法[10]、最大期望算法[11]以及基于生成树的多视角点云配准算法[12]等。上述方法为多视角点云的精确配准问题提供了很好的解决思路,保证了通过光学手段对列车轮对进行非接触式检测的可行性。
目前,国内列车轮对的生产制造企业及检修部门对于列车轮对的检测仍以人工检测的方式为主。以国内某车辆段为例,该车辆段每天需要检测的列车轮对数量达到数百个[13]。人工检测的质量容易受到测量机构加工、装配误差以及变形的影响,且测量过程中的人为因素对测量精度影响较大,测量效率较低,制约了列车轮对生产制造企业及检修部门的效能发挥。针对上述问题,本文提出了一种利用三维结构光测量设备对列车车轮进行三维检测的方法。该方法基于面结构光采集到的列车车轮三维点云数据,通过对三维点云数据的处理以及对列车车轮轮缘及踏面的三维重建,实现对于列车车轮的三维检测。
1 三维点云数据采集与处理
1.1 三维点云数据采集
本文中采用基于面结构光的三维测量仪器采集列车车轮的三维点云数据,采用的测量设备为TNS—M三维光学测量系统,它是一种非接触式的三维扫描测量系统。该测量系统的单面扫描范围为200 mm×150 mm,单面测量精度可达0.02~0.015 mm,平均图像点距为0.15~0.10 mm,图像分辨率为1 280×1 024,单面扫描时间小于5 s。该测量系统的测量原理是将一定模式的光源以栅状光条的形式投影到物体表面,然后使用两个镜头获得不同角度的点云数据,并通过图像处理获得图像上点的三维坐标。考虑到车轮需要扫描的区域范围较大,多幅点云数据进行配准时较为困难且难以保证其配准精度,因此采用在扫描区域上粘贴标记点的方法,辅助多幅点云数据进行配准,提高配准的精度。单次扫描区域尺寸由测量系统的单面扫描范围决定,粘贴标记点时保证相邻的扫描区域至少包含3个以上相同的标记点[14]。在单次扫描区域范围内均匀粘贴标记点,考虑到列车车轮本身的特点,在车轮踏面曲率变化较大的区域增加粘贴的标记点的数量和密集度,以保证测量和配准的精度。考虑到车轮表面的颜色较暗,因此在车轮表面均匀喷涂显影剂,避免车轮表面色差导致的扫描数据质量差、车轮反光严重等问题,保证三维点云数据的质量和精度。
1.2 三维点云数据处理
列车车轮的三维检测需要准确建立列车车轮的三维模型,曲面重建的效果又依赖于三维点云数据的质量,因此想要获得高精度的列车车轮三维模型,在曲面重建前对采集到的三维点云数据进行处理是十分必要的。由于车轮轮缘的遮挡以及检测设备测量范围的限制,要想采集到完整的列车车轮的三维点云数据,需要使用测量仪器从不同的角度不同的位置对列车车轮进行扫描。三维点云数据的处理涉及采集到的多组三维点云数据的配准,点云离群点的去除以及平滑处理操作。由于列车车轮粘贴标记点处无法采集到三维点云数据,因此还需要对采集到的三维点云数据进行孔洞修补。
1.2.1 离群点去除
使用三维结构光测量设备对列车车轮进行检测的过程中,考虑到周围环境光源的影响以及检测过程中可能存在的遮挡物的影响,获得的三维点云数据可能存在“噪声点”,本文中采用了基于统计分析的方法对原始点云数据中的测量噪声点进行移除[15]。该方法的基本原理是对检测到的每个点,计算该点到其所有临近点的平均距离。假设得到的结果是一个由均值 μ和标准差 σ确定的符合高斯分布的结果,那么平均距离在所确定的阈值之外的点将被视为是离群点,并从点云数据中移除。
平均距离的概率密度函数为

式中:xi——任意点到临近点的平均距离,i=1,2,3,···;μ——平均距离均值;
σ——标准差。
假设每个点的临近点数为N,标准差倍数为n,当某点到其临近点的平均距离大于平均距离标准差的n倍(nσ)时,该点将被视为离群点并被移除。
1.2.2 点云配准
对列车车轮的三维点云数据进行采集的过程中,考虑到多幅点云数据配准的精度和效率等问题,采用了在扫描区域粘贴标记点的方法。本文在对两组三维点云数据进行配准的过程中,基于预定位标记点自动寻找重合区域,并确定匹配点对[16]。最终,利用迭代最近点算法(ICP算法),实现点云数据的精确配准。迭代最近点算法是由Besl等[17]于1992年提出的,该算法根据两组点云数据之间的对应点,建立误差函数,通过迭代将误差函数最小化,同时确定坐标变换矩阵。Besl等人提出的ICP算法使用四元数方法求解旋转矩阵,ICP算法的具体流程如下:
1)假设待配准点集为:P={pi};模板点集为:X={xi}。对于模板点集X中的每个点,计算其到待配准点集P中每个点的欧氏距离,取欧氏距离最小的点,作为对应点放入新的点集P′中。
2)设点集P′和点集X的中心点分别为μp和μx:

其中Np,Nx为点集P′和点集X中点的数量。
计算得到点集P′和点集X的中心点后,求出其协方差矩阵:

令反对称矩阵:

可得A的 3个循环元素构成的列向量:

利用该列向量构建4×4对称矩阵:

I3—3×3 的单位矩阵。
3)计算矩阵Q(Σpx),并对所得矩阵进行特征值分解,计算最大特征值及其对应的特征向量,将该特征向量作为四元数。
假设四元数为qR=[q0q1q2q3]T,由上述计算可得由四元数表示的旋转矩阵为:

由旋转矩阵可得平移向量为:

4)使用如下函数计算两个点集之间的迭代误差,如果结果小于阈值则停止迭代,否则继续重复上述步骤 1)~3):

根据上述迭代最近点算法的基本流程,即可对滤波处理后的采集到的点云数据进行配准。为解决多视角序列扫描得到的点云数据在配准过程中存在累积误差的问题,在利用标记点对序列扫描得到的点云数据进行配准后,利用光束法平差方法[18]对所有点云数据进行位置调整,最终达到消除多视角配准的累积误差的目的。
1.2.3 点云平滑处理孔洞修补
针对配准后的点云数据存在点云均匀性较差且存在较多不规则孔洞的问题,本文中提出一种上采样与下采样相结合的点云平滑处理及孔洞修补方法。
首先需要对输入的点云进行最小二乘法拟合,其基本原理是找到能够使拟合函数与原始点云点集的误差的平方和最小的参数[19]。根据所得参数确定拟合函数,并对三维点云数据中所选范围内的全部点进行最小二乘法拟合计算,即可获得平滑处理后的三维点云数据。将拟合后的点投影到移动最小二乘法(moving least squares, MLS)平面上,计算MLS平面上点的Voronoi图,并在Voronoi图的顶点处添加点,每次添加时,选择具有最大空圆的顶点[20]。重复该过程,直到最大圆的半径小于设定的阈值,根据完成点添加的MLS平面上的投影点云的连接关系确定各原始三维点间的拓扑连接,可实现三维点云的孔洞修补操作。
针对孔洞修补处理后的点云数据量较大且均匀性较差的问题,采用基于体素化网格的方法对点云数据进行下采样处理。该方法的基本原理是对输入的点云数据创建三维体素网格,然后在每个体素,即三维立方体内,用体素中所有点的重心来表示体素内的其他点,最终可以得到经过体素化网格处理后的经过过滤的三维点云。该处理方法相比于使用体素中心逼近的方法速度较慢,但是针对于车轮的曲面模型能够获得更高的精度。
2 列车轮对三维检测整体方案
基于列车车轮原始三维点云数据的采集和处理结果,对处理后的三维点云数据进行曲面重建,即可获得待测车轮的三维模型,实现对于列车车轮的三维检测。本文根据列车车轮三维检测的检测要求,提出了针对于列车车轮三维检测的整体方案,三维检测整体方案的流程如图1所示。

图 1 三维检测整体方案流程图
检测设备采集到列车车轮的三维点云数据后,首先利用离群点去除方法对点云数据进行预处理;然后对处理后的多幅三维点云数据进行配准、平滑处理以及孔洞修补操作,可以得到能够满足曲面重建要求的三维点云数据;最后对处理后得到的三维点云数据进行曲面重建以及平滑处理,即可得到列车车轮的三维模型,实现对于列车车轮的三维检测。
3 试验结果与分析
3.1 三维点云离群点去除结果与分析
为验证本文中所提出的点云处理方法,利用点云库(point cloud library, PCL)开源C++编程库进行试验。PCL是针对点云数据处理的大型跨平台开源C++编程库,能够实现大量点云相关的通用算法和数据结构,包括点云获取、滤波、分割、配准、检索、特征提取、识别、追踪、曲面重建以及可视化等[21]。本文试验在硬件平台处理器为Intel i7-7500U 2.7 GHz、内存为8 GB的计算机上进行。软件的开发环境为Ubuntu16.04、PCL1.8.0以及 Qt4。基于 PCL中的Statistical Outlier Removal库函数,对三维结构光测量设备采集到的列车车轮踏面的三维点云数据进行离群点去除处理。未进行离群点去除处理的原始点云数为349 498,针对于列车车轮踏面的几何特点选取不同的临近点数N以及标准差倍数n值进行试验,试验结果如表1所示。分析试验结果可知,在保证N值不变的情况下,随着n值的增大,被移除的点云数目减少,n值的增大对点云去除处理时间的影响较小;在保证n值不变,由于查询的临近点数N增加,对点云去除处理时间的影响较大,去除的点云数也在增加。综合考虑后续点云处理对离群点去除处理的要求及处理时间的影响,选取N=100,n=2时即可获得能够满足点云后续处理要求的去噪后点云,且处理时间处于可接受的范围内,如图2所示。
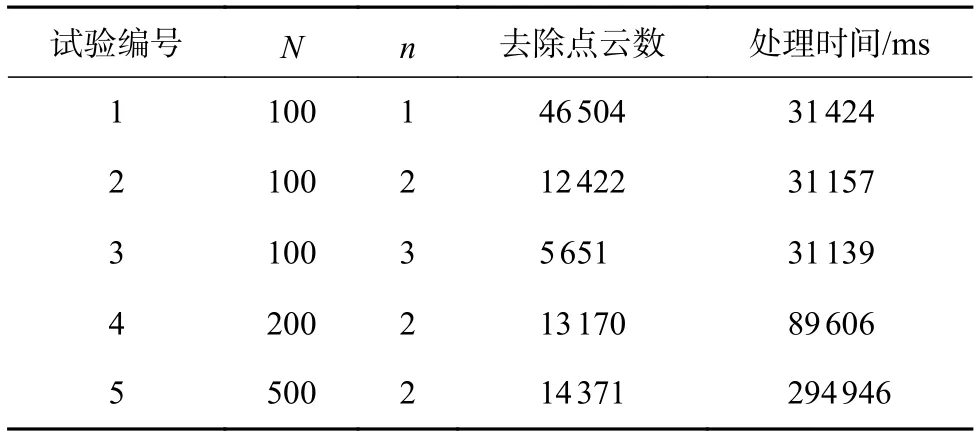
表 1 离群点去除试验结果

图 2 点云离群点去除
3.2 三维点云配准结果与分析
利用1.2.2小节所述的迭代最近点算法对去噪后的多组原始点云数据进行配准,考虑到列车车轮本身的尺寸大小设置对应点对之间的最大距离为1 000 mm。同时对迭代的终止条件进行设置,设置最大迭代次数为100,两次迭代的变换矩阵差值为1×10-10mm,迭代的均方误差为0.01 mm,配准结果如图3所示。

图 3 三维点云配准
3.3 三维点云平滑处理孔洞修补结果与分析
配准后的三维点云数据均匀性较差,对曲面重建效果将造成较大的影响,利用PCL中的Moving Least Squares库函数对配准后的三维点云数据进行点云平滑处理,进一步消除噪声点,提高三维点云的均匀性。选取不同的多项式拟合阶数K以及拟合点搜索半径R,对配准后的三维点云进行平滑处理,并将处理后的三维点云数据进行曲面重建,以对比平滑处理的效果,结果如图4所示。

图 4 点云平滑处理
分析结果可知,多项式拟合阶数K越高,点云的平滑处理效果越好;搜索半径R越大,点云的平滑处理效果越好。但是过高的拟合阶数和过大的搜索半径将导致处理时间的增加且点云平滑效果将不再出现明显变化,因此选取多项式拟合阶数为4,搜索半径为7 mm,对点云进行平滑处理。
基于PCL中的Upsampling method库函数及Voxel Grid滤波器,采用上采样与下采样相结合的方式实现列车车轮三维点云的孔洞修补。分别设置上采样的搜索半径r以及迭代步长L,对带有孔洞的三维点云数据进行上采样,结果如图5所示。

图 5 三维点云上采样(单位:mm)
分析结果可知,上采样的搜索半径r越大,采样点数越多;迭代步长L越小,采样点数越多,且迭代步长对采样点数的影响更大。考虑到过度的上采样会对原始三维点云的精度产生影响,且会增加上采样的时间,同时考虑到为保证曲面重建效果对点云最大间距的要求,选取上采样搜索半径r=6 mm,迭代步长L=3 mm时获得的三维点云结果,并使用Voxel Grid滤波器对其进行稀疏化处理,结果见图6。

图 6 三维点云下采样
3.4 列车车轮曲面重建
为获得列车车轮的三维模型,使用处理后的三维点云数据,对列车车轮进行曲面重建。考虑到相对于其他曲面重建方法,贪婪投影三角化算法具有误差小,曲面失真度小,计算使用的时间及空间复杂度小的优势[22]。本文中采用贪婪投影三角化算法[23]实现对列车车轮的曲面重建。贪婪投影三角化算法的基本流程包括:1)将三维点云投影到二维坐标平面内,对投影点进行Delauany三角化处理,得到各点的关系矩阵;2)将投影得到的点云在平面内采用基于Delaunay三角剖分的空间区域生长算法扩张边界;3)根据二维坐标平面内点的连接关系确定原始三维点之间的拓扑连接,最终可以得到曲面重建后的模型。本文中针对列车车轮曲面的几何特点,对三角剖分的特征参数进行设置:设定搜索的最大临近点个数为100,搜索的临近点最远距离为2.5 mm每栅格,重建后三角形的最大可能边长为50 mm,最大二面角为45°,重建后三角形的最大角为 120°,最小角为 10°。
考虑到贪婪投影三角化算法假定曲面光滑且点云密度变化均匀,在曲面重建的同时不能实现曲面的平滑。因此,采用拉普拉斯平滑算法[24]对重建的曲面进行平滑处理,其基本思路是建立临时点集以储存点平滑后的位置,计算三角网格模型的顶点的直接领域点的中心位置坐标,将三角网格模型的每个顶点都移动到其直接邻域点的中心位置处,将移动后的顶点坐标储存到临时点集中,使用临时点集代替原三角网格模型顶点坐标组成的点集进行曲面重建。利用该方法对重建所得曲面进行平滑处理,最终可以得到列车车轮的三维模型如图7所示。

图 7 列车车轮曲面重建
为提高列车车轮模型的重建精度,将重建所得模型与列车车轮的基准车轮模型同时导入Geomagic Studio软件中并对两者的偏差进行计算,偏差分析结果如图8所示。由分析结果可知,最大距离分别为12.640 mm和-13.893 mm,最大距离点对分布于重建所得模型的边缘,这是由于只采集了列车车轮的部分三维点云数据所导致的。重建模型与基准模型的标准偏差为1.768 mm,实现了对于列车车轮的曲面重建。

图 8 列车车轮曲面重建偏差分析
4 结束语
1)本文提出了一种利用三维结构光测量设备,采集列车车轮的三维点云数据。通过对三维点云数据的处理以及曲面重建,获得了待测列车车轮的三维模型,实现了对于列车车轮的三维测量,为列车车轮的非接触式三维检测提供了基础。
2)针对粘贴标记点处无法获取三维点云数据,采集到的三维点云数据存在较大的不规则孔洞的问题,提出了上采样与下采样相结合的点云孔洞修补方案,最终获得了能够满足曲面重建要求的列车车轮三维点云数据。
3)针对列车车轮三维点云数据的特点,设计了三维点云数据处理的基本流程,即包括离群点去除、三维点云配准、点云平滑处理及孔洞修补等步骤在内的三维点云数据处理过程,结合试验及结果分析确定了针对于列车车轮的最优参数,设置并获得了能够满足曲面重建要求的列车车轮三维点云数据。
