基于图像识别的道路铺面破坏研究
2021-04-24
(广东工业大学 广东 510805)
1 前言
近年来国外单位在铺面破坏上针对裂缝、坑洞识别都积极采用高科技及自动化方式。日本、加拿大、美国等国家都发展出一套符合自己国内自动化铺面裂缝、坑洞检测系统。因此,如何将图像处理技术应用于铺面裂缝、坑洞识别系统,同时配合简易迅速的铺面检测标准操作程序,加速检测人员对于铺面破坏识别速度以便进行实地的路面破坏调查工作成为了当前道路铺面破坏研究的重点。现今国内维修道路的工作大都需要众多人力,道路维修人员为检测道路使用情况,必须在车流量稀少或夜晚时段进行检测。因此,检测速度非常缓慢且道路上检测非常危险。使用铺面检测车形式来做路面检测,不但能提高检测效率,降低路面维修成本,让行车更有保障。
目前铺面表面破坏上使用图像处理技术,主要是针对铺面裂缝的识别,且集中于纵向裂缝、横向裂缝、龟裂及块状裂缝等。过去图像处理技术已广泛应用在许多专业领域的检测方面。
2 系统框架
本系统建议拍摄铺面破坏所采用图像处理方法,借由架设于车辆后端架子上的Line Scan CCD 拍摄道路铺面,将拍摄的图像存储在工作站硬盘中,再将图像读出,最后经由本文撰写的铺面破坏图像软件识别铺面状况。本文以直线沿着一般市区道路铺面向前连续拍摄,获取图像过程属即时拍摄方式,然后依据所拍摄的图像作后处理的分析,其处理的图像都属2D 平面图像。最后将铺面损坏信息(裂缝、坑洞)汇整并且进行铺面损坏情形评估,本文图像处理识别系统的工作流程如图1 所示。
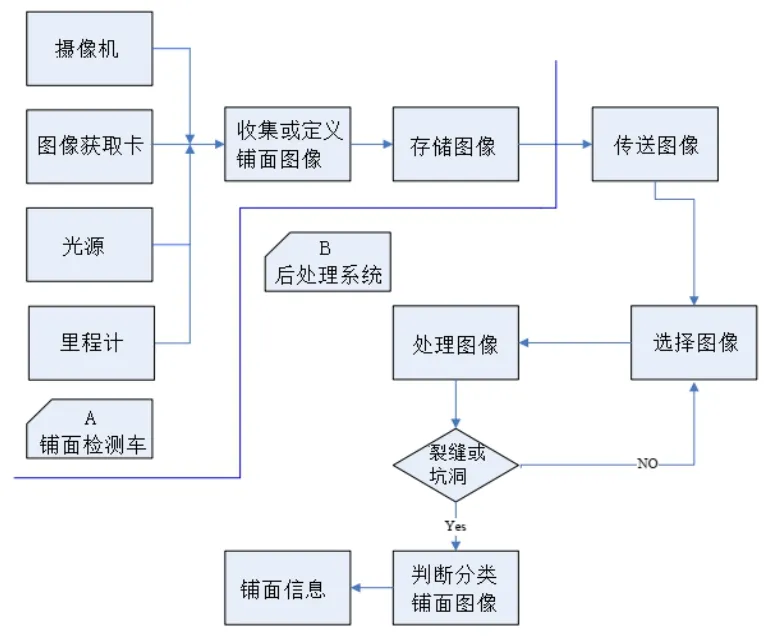
图1 图像处理和识别系统流程
本系统通过平均消息量(熵)的图像处理技术应用于铺面裂缝、坑洞(人手孔)等识别处理,进而提供铺面损坏情形、长度、宽度、面积、破损严重程度以及相关铺面损坏信息,最后进行PCI 指标评分表作为判定铺面品质以简化人工操作上的不便,并可迅速获得该路段的PCI 评分结果。铺面破坏量化分为纵向裂缝、横向裂缝、坑洞、龟裂及块状裂缝几种,其分别计算纵、横向裂缝长度、坑洞面积及裂缝平均宽度的流程如下:
(1)纵向裂缝:
①细化后图像像素(Pixels)累加。
②重建后图像,计算其纵向剖面两点之间的距离,累加所有的像素总数Pixels,并判断其是否有交于两点,除上像幅Y 轴的长度。
(2)横向裂缝:
①细化后图像像素(Pixels)累加。
②重建后图像计算其横向剖面两点之间的距离,累加所有的像素总数Pixels,并判断其是否有交于两点,除上像幅X 轴的长度。
(3)坑洞:本文以2D 的图像处理,故仅能计算坑洞破坏面积。
坑洞面积:计算坑洞面积的方式,本文仅计算由分割图像矩阵所转换出的次图像值0 和1 像素总数,因为1(破坏部分)代表铺面破坏的Pixels 值个数,及可求得坑洞面积。一般道路铺面坑洞多为不规则形状且坑洞周边都有碎裂等情形,人工测量时必定有所误差,若能提升测量正确率计算其图像像素面积,便可以避免检测人员不知如何测量的困扰。
(4)龟裂及块状裂缝:
欲将拍摄龟裂及块状裂缝的图像进行量化,因其破坏范围属区域性破坏形式,且其破坏内容都为不规则性以及无明显方向性,故相较于纵、横向裂缝规则且具有方向性,其量化龟裂及块状裂缝等破坏长度并非其重点的项目。计算重点在于求取破坏范围内各裂缝区块的平均宽度,针对其平均宽度进行破坏程度判别,进而判定其严重等级(轻、中、重)。本文首先针对各区块裂缝进行分析,使用IMAQ-Particle Analysis 求算个别颗粒区块的裂缝平均宽度,再计算所有颗粒的平均宽度,及该破坏的裂缝平均宽度。
3 系统验证
3.1 系统流程
图2 为本文的程序系统的流程图,本文使用Line Scan CCD 进行路面拍摄工作,拍摄高度为2 米:以此得到最大铺面破坏图像面积为2048×1536(Pixels),并以60~80 公里时速拍摄道路铺面。
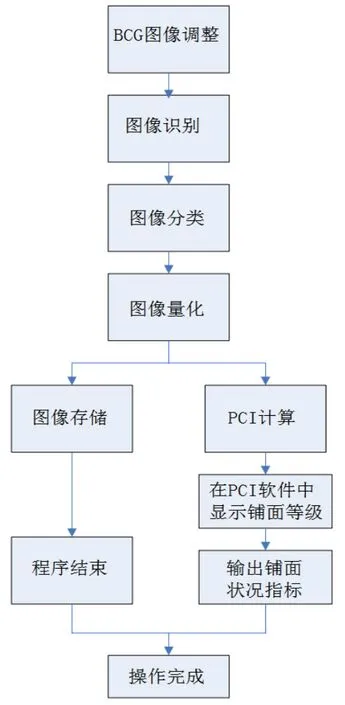
图2 程序流程图
3.2 铺面破坏图像切割
本文读取原始图像相片的长宽为多少像素后,并计算欲分割的X(Pixels)相片宽度,Y(Pixels)相片长度。相片中经过切割运算N×N像素大小的次图像(Sub Image),其中次图像转换为矩阵形式存储,同时并进行二值化的工作。
3.3 铺面破坏图像识别
本文使用铺面破坏图像识别系统功能中的最佳灰阶门槛值(熵)选项,进行图像中各灰度值出现概率的计算与输出其数据文件,针对铺面破坏图像物体(裂缝与坑洞)与铺面完整部分作最佳分离门槛值。在识别过程中图像会有噪声与不清晰的图像产生,依据滤波(Filter)、腐蚀(Erode)、扩散(Dilate)等处理后,最后将识别图像显示于画面上并且存储,图3 为铺面破坏识别结果。

图3 横向裂缝铺面破坏识别结果
3.4 铺面破坏图像分类
本文进行完图像识别步骤后,接着执行铺面破坏图像分类程序,在分类的过程中,加入标签形成标签图像,同时并计算各标签的数量,经过计算统计动作后,在程序中进行判断分类为四种形式分别为无破坏(NO Cracking)、坑洞(Pothole)、为线性型(Linear)、接缝型(Joint)。
3.5 细化处理
本文首先读取重建后的次图像矩阵,在图像中执行该图像大小的循环次数,并在执行过程中加入3×3 形式的滤波功能可提供有效的图像识别,并进行加总计算,将判别输出结果存储于暂存器(Buffer)中,读取暂存器中图像数值数据转换成完整图像图片,最后通过细化处理公式,将图像骨架(Skeleton)显示输出。点选完毕后即可存储细化后的铺面破坏图像。
3.6 铺面破坏图像信息
(1)首先将原始图像转换成矩阵形式,并计算图像矩阵中 R,G,B 三种色彩像素值,并同时以直方图的型式显示其R,G,B 分布情形。
(2)执行灰阶图像信息程序。
①首先将铺面破坏图像由图像形式转换成矩阵形式。
②采用RGB 转换公式:Y=0.922R+0.578G+0.114B 意思就是若原图像像素为(R,G,B),利用此转换公式后取得适当的Y 值,该値当作该像素的灰阶值。
③将灰阶值转换成图像形式,并经过直方图的表示将铺面破坏图像灰阶值分布情形显示出来,作为铺面破坏图像分布图。
4 结论
本文的铺面破坏图像识别系统的研究,以铺面检测车的型式将拍摄的破坏图像进行分析处理,以提升人为检测的正确率,并维护检测人员的人身安全。此系统以100 米为基准进行铺面拍摄,并以铺面状况指标(PCI)评比道路品质,迅速获得该路段的评分结果。根据理论在进行图像识别过程中,识别的结果会受CCD 摄像机、拍摄的角度、高度、光源以及本身铺面破坏条件所影响。因此,本文必须依赖提高像素量才能兼顾到精确度。
