基于模糊PID 算法的奶牛饲喂装置温控系统的设计*
2021-04-24朱学飞
朱学飞
(新疆石河子职业技术学院,新疆 石河子 832000)
新疆地区冬季气候寒冷,在奶牛喂养过程中,冰冷的饲料会对奶牛的泌乳以及牛奶的质量产生不利的影响,导致牛奶乳脂率下降。本文在现有的饲喂装置基础上,设计了一种基于PLC控制的模糊PID温控系统,应用于新疆地区的奶牛精准饲喂装置中。
1 控制系统总体设计要求与目标
1.1 总体设计
本文设计的饲料温控装置是由PLC、触摸屏和组态软件构成的一种过程优化在线监控系统。该系统是通过人机界面给出主控信号,选用西门子S7-200 SAMRT系列PLC作为控制器,控制微波磁控管、传送带及送风电机,实现饲料温控装置的自动控制,完成饲料的加热工作。
1.2 控制目标
通过对八师143 团奶牛养殖场进行充分调研,结合调研情况和饲料加热作业的工作条件以及国内奶牛精准饲喂设备的发展现状,提出如下控制目标。
1)系统运行自动化:饲料温控系统能够在设备开机上电后,通过简单的参数设置便能完成整个加热工作流程,实现无人值守,节约人力资源和人力成本。
2)系统有必要的保护功能:主电路、控制电路必须具备短路保护、过载保护、失压保护等功能。
3)控制系统节能高效:与同类饲料加热设备相比,在加热速率不低于传统的加热设备的情况下,能耗明显降低,符合可持续发展理念。
4)易于操作的人机交互界面。
2 温控系统的硬件设计
2.1 控制系统硬件选型
加热器件选用微波磁控管。磁控管产生微波,辐射饲料使其内部产生高温,向外扩散,加热均匀,效率高;通过控制固态继电器SSR调节磁控管输出功率,易于实现PID控制,系统自动化程度高,人工成本低。微波除了热效应外还具有消毒杀菌作用,微波可以穿透饲料内部,杀灭各种细菌繁殖体及真菌,非常适合应用场景。
作为S7-200 的更新换代产品,S7-200 SMART 继承了S7-200 的优点,指令基本上和S7-200 相同,配套的编程软件STEP7-Micro/WIN SMART界面友好,支持8路PID功能,自动/手动切换及PID整定,可以快速方便实现控温功能。
变频器是饲料微波加热控制系统执行机构的驱动元件。西门子MM420 变频器结构紧凑,便于安装,适用于多种变速驱动应用,完全能满足系统设计要求,也与系统传送带电机功率匹配。
2.2 主电路设计
饲喂装置温控系统需要控制的设备器件主要有:传送带电机、送风电机、抽湿电机及微波磁控管若干。这些控制器件的控制方式如下。
1)传送带由三相异步电动机M1 驱动,由变频器调节,三段速运行。根据饲料的种类和加热作业需要的运行时间,从触摸屏上输入电动机运行速度。
2)送风电机为双速电动机M2,低速运行保障干燥仓内温度均衡,高速运行送风降温,可实现仓内循环风速控制。
3)抽湿电机为三相异步电动机M3,只进行单向正向运行。
4)加热模块为磁控管。固态继电器接收PLC 给出的信号,控制磁控管的工作状态。
2.3 控制电路设计
系统控制接线电路如图1所示。继电器型PLC SR40作为主站结合变频器控制饲料输送带,结合交流接触器控制送风电机和抽湿电机;晶体管型PLC ST30作为从站,实现PID算法控制PWM输出,以控制磁控管的开闭,保持温度恒定。
3 模糊PID控制器设计
3.1 PID控制原理
随着离散控制理论的发展,PID也逐渐应用于计算机化控制系统,但是积分项和微分项都不能直接使用,需要进行离散化处理,用描述离散系统的差分方程替换描述连续系统的微分方程,得到相应的数字PID控制器。本文研究的位置式PID算法表达式为:

图1 系统控制接线电路

式中,KP是比例系数,增大KP可以使系统响应速度更快,调节精度变高,会增大超调量,导致系统不稳定;Ti是积分系数,积分项的引入能够消除系统的稳态误差。Td是微分系数,它能预测误差变化的趋势,提前使抑制误差的控制作用等于零,甚至为负值,改善系统在调节过程中的动态特性,避免被控量的严重超调[1]。
3.2 模糊控制
模糊控制是指利用模糊数学知识模仿人脑的思维对模糊的现象进行识别和判断,给出精确的控制量,利用计算机予以实现的自动控制。
典型的负反馈控制系统由控制器、被控对象、测量装置及执行机构等部分组成。如果仅采用 PID 控制,则很难满足系统的快速响应需求。由于温控系统属于非线性控制系统,各参数是不断变化的,为了达到控制要求,必须对参数进行不断的设置。传统的PID 控制系统往往没有准确的模型,导致参数难以确定[2]。
本文选择编程软件STEP 7- Micro/WIN SMART 中的PID 指令向导生成PID 程序。PID 参数模糊自整定是找出PID 中3 个参数与温度误差e和误差变化率ec之间的模糊关系,在控制系统运行中循环计算e和ec的值,根据模糊控制原理对Kp、Ki和Kd中的3 个参数进行在线修改,满足不同e和ec对控制参数的不同要求,完成对温度的控制。
3.3 控制系统实现
饲喂装置温度控制系统结构如图2 所示。该系统是由PID 控制器、固态继电器SSR、加热装置磁控管、热电阻传感器、变送器、A/D 转换器组成的单回路温控系统。PID 控制器和A/D 转换用西门子S7-200 SMART PLC ST30 来实现。上位机IPC中使用STEP7-Micro/WIN SMART作为编程软件,利用PID指令功能块,调用PID指令向导;使用MCGS嵌入式系统对触摸屏界面进行组态设计,完成上位机对PLC 的控制过程进行实时监控与数据采集、趋势曲线的显示等任务。

图2 温度控制系统结构框图
系统运行时,热电阻传感器检测饲料温度,温度变送器将热电阻输出的微弱电压信号转变直流电压信号,模拟量模块AM06中的A/D转换器将此信号转换成与温度成比例的过程变量PV;CPU将其与温度设定值SV进行比较,得到温度偏差值EV;控制器以偏差值EV为输入量,进行PID控制运算;模拟量模块AM06 中的D/A 转换器将PID 控制器的数字量输出值转换为直流电压信号,用以控制固态继电器和交流接触器的开关状态,调整磁控管的功率和送风电器的启停;当温度低于目标值时,开启磁控管加热,当温度高于目标值时,开启送风电机降温,以此实现温度的恒定控制[3]。
PID 温度控制模块的PLC 梯形图如图3 所示。首先对PID 初始化参数进行设定,分别对增益、采样时间、积分时间常数、微分时间常数进行设置。此外,在寻找合适的增益和积分时间常数时,先赋一个较小的值给增益,给积分常数一个较大的值,确保不会出现较大的超调,不断调试以寻求最佳参数。PID 控制器系数Kp=3.2,Ti=7.6,Td=5.3,模糊控制器控制温度在35℃上下浮动,符合控制要求[4]。
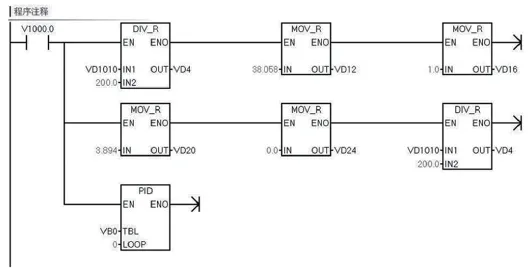
图3 PID 温度控制梯形图
4 结论
本研究利用现代电气控制技术,针对温控系统非线性、大滞后和时变性等特点,采用模糊控制与PID算法相结合的方法,设计了奶牛饲喂装置温度控制系统,温度控制精度达到±0.5℃,系统稳态误差小,控制效果良好,自动化程度和实用性较高。
