蛇形机器人翻越阶跃型障碍的算法研究与仿真
2021-04-24李鸿昌郝建新赵祖智凌浩瀚李光辉张璐逍
李鸿昌 郝建新 赵祖智 凌浩瀚 李光辉 张璐逍 张 枫
(1、中国民航大学 电子信息与自动化学院,天津300000 2、中国民航大学 基础实验中心,天津300000 3、中国民航大学 航空工程学院,天津300000)
1 概述
随着自动化技术的不断发展,机器人的应用场景越来越多[1]。我们发现自然界中的蛇类动物运动灵活,地形适应能力强,于是制造了蛇形机器人。蛇形机器人在军事、救援等诸多领域都有应用,它能代替人类前往危险、复杂的环境作业[2-7],世界上很多国家都十分重视蛇形机器人的研究[8]。越障是蛇形机器人研究中的重要部分,现阶段的成果大多为只能翻过矮小障碍,对较高的障碍无能为力,如抬起前半截容易左右倾斜[9]。本文作者提出的新型越障方式可解决这类问题,使蛇形机器人能够翻过陡峭的阶跃型障碍,拓宽了蛇形机器人的工作范围,通过仿真实验和实物模拟验证本方法的有效性。
2 蛇形机器人结构
机器人由多个独立的驱动单元正交连接而成,每个模块由舵机提供旋转动力,而相邻模块正交链接使机器蛇可以做水平和垂直的运动。
在组合上可以实现相当于万向节的效果,但是在同一运动方向上的等效模块长度是单个模块长度的两倍。给定两个舵机不同信号能使它们达到任意的角度,就能控制机器人水平和垂直两个维度的运动,完成三维空间内的各种动作。
3 越障规划
为了使越障能够稳定的进行,我们设计以下几个动作:
3.1 盘旋抬升
蛇形机器人按图1 将身体盘起来,以螺旋方式上升高度,直至达到翻越要求。这种抬升高度的方式比较稳定,重心内敛,不易摔倒,能抬起到更高的高度。
3.2 搭上障碍顶部
在机器蛇头部高度超过障碍物顶部高度时,机器蛇按图2弯曲头部,将头部搭在障碍物顶部,并适当弯曲,勾住障碍。此时机器蛇身靠近头部部分会形成一个弯弧状,于障碍物顶端。
3.3 蠕动越障
如图3 机器蛇接下来以蠕动的形式,将蛇身弯曲部位逐渐向着机器蛇尾部方向挪移,依靠重力使得越来越长的头部越过障碍,向另一侧下落,而尾部舒展开,逐渐向上移动。
3.4 越障后着地
机器蛇按图4 头部着地之后立刻折叠成弯曲状以稳定重心,同时蠕动运动继续进行,直至整个机器蛇完全越过障碍。

图1
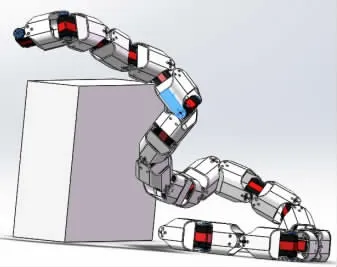
图2

图3

图4
4 仿真实验
4.1 建立越障控制函数
根据平面图像与其内切圆的角关系,本章节将据此建立仿生机器人蛇翻越“阶跃”型障碍的控制函数模型。如图5 所示,机器蛇的任意两连杆与圆相切,两连杆之间的夹角∠θ2等于两条半径形成的夹角∠θ1,那么存在公式(1)成立。

其中,R 为相切圆半径,C 为连杆长度,θi为连杆i-1 和连杆i 之间的夹角。
如果参数R 随时间变小,那么仿生机器蛇则向内盘旋,由此可以推出仿生蛇各水平关节角度关于时间的函数,如式(2)所示。

其中tf为盘旋终止时间,n 为总关节数,i 为关节编号。
盘旋结束后,仿生蛇将蛇头抬起,根据Serpenoid 曲线建立蠕动控制函数模型。蜿蜒曲线是在x-y 平面内,一条过原点的曲线,曲线上任意一点可以由式(3)表示。
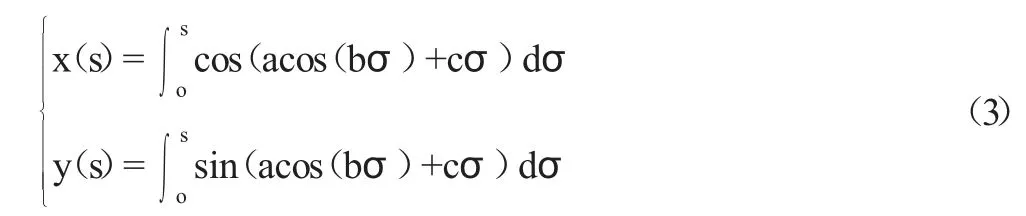
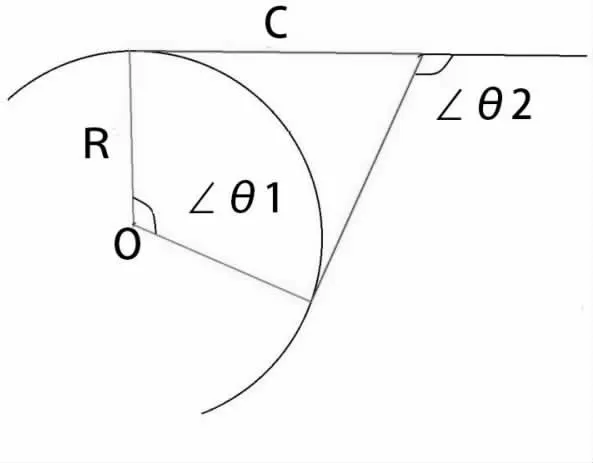
图5 平面图像与其内切圆的角关系
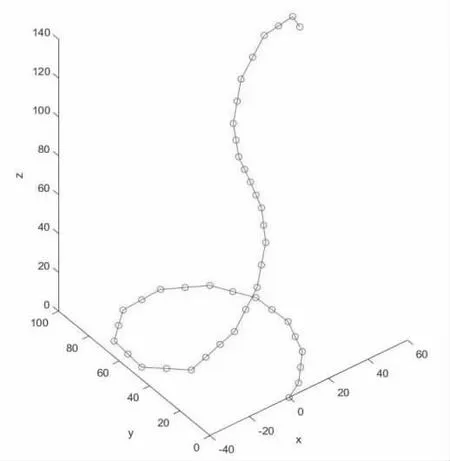
图6 抬起前20 节连杆仿真结果图
将其离散化后可得俯仰关节角度关于时间的函数,如式(4)所示。

4.2 在matlab 中进行仿真实验
建立蛇形机器人由40 个连杆组合成正交结构,每根连杆长10cm,重102g,每个舵机最大摆动角度为±60°。仿真结果如图6 所示。
5 结论
自由度很高的蛇形机器人给运动路径规划和控制带来了很大的挑战,因此只从越障这一方面深入研究。从仿真结果来看,这种算法能够跨越更高的障碍,同时我们可以看到机器蛇的重心始终处于一个稳定的位置,体现本算法的可行性和优越性。