基于模型补偿的机床进给系统的谐振抑制
2021-04-24李文庆李作庆王庆朋董大鹏
李文庆 李作庆 王庆朋 董大鹏
(科德数控股份有限公司,辽宁 大连116600)
数控机床传动机构不是完全刚性,机械谐振问题普遍存在。较低的机械谐振频率会限制伺服增益参数的提升,使进给系统的带宽不够,进而增大机床轴控制的轮廓误差,甚至会引起机床轴终端的振动,影响工件的加工表面质量。为了减小和消除机械谐振对数控机床性能的影响,通常从以下两个方面进行解决:通过改变机械结构设计、提高传动刚性、减小负载惯量,以此来提高机械谐振频率,使控制系统的带宽可以提高;在控制器上通过使用低通滤波或者陷波滤波等方法,降低机械谐振对控制系统带宽的限制。本文通过对双质量振动模型的分析,提出一种对机械谐振进行校正的算法,并通过对机械谐振参数的辨识完成对校正算法参数适配。
1 机械谐振分析及对控制性能的影响
1.1 基于双质量模型的机械谐振分析
一般使用双质量系统分析。谐振框图如图1 所示。电机侧的惯量与负载测的惯量之间的弹性环节类似一个弹簧,弹簧力拒正比于电机转子与负载的位置之差。粘滞摩擦形成谐振系统阻尼项,阻尼项产生的力拒正比于速度差。电机转矩到电机转子速度的传递函数为:
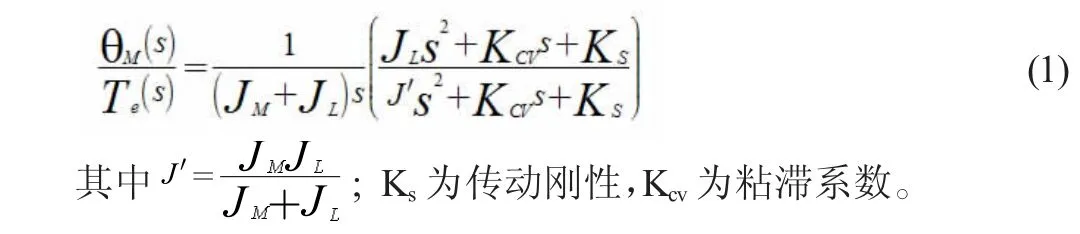
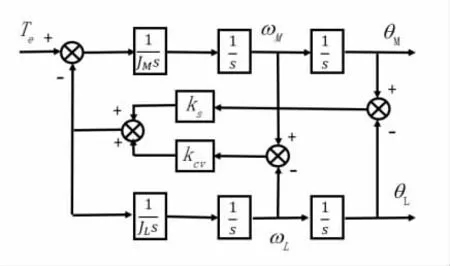
图1 双质量振荡模型传递函数框图
在式(1)中可以看出当s 比较小时,右边括号内部分约等于1,即低频段的频率响应等效于一个刚体传动。式(1)可以变形为式(2)。对于高频段当S 较大时,式(2)的右边部分约等于1,可以看出高频段的频率响应相当于没有负载惯量,只有电机侧惯量。
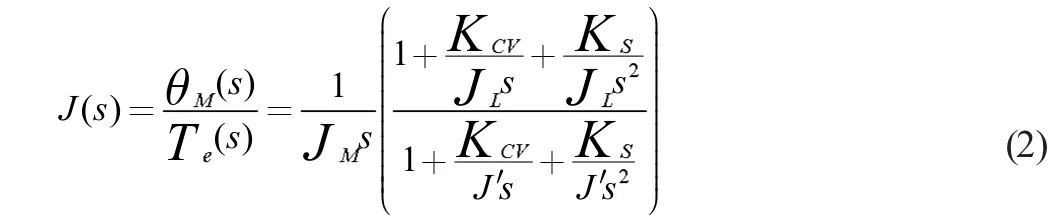


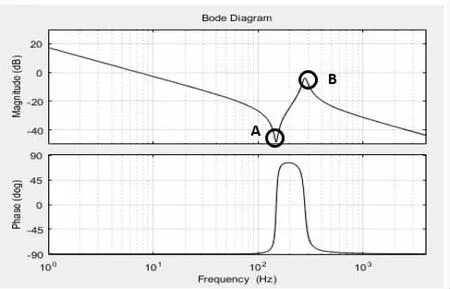
图2 机械谐振伯德图
1.2 机械谐振对控制系统的影响
机床的进给伺服控制通常采用转矩环、速度环、位置环,三环控制。其中速度环要有足够的带宽。控制结构图如图3 所示:
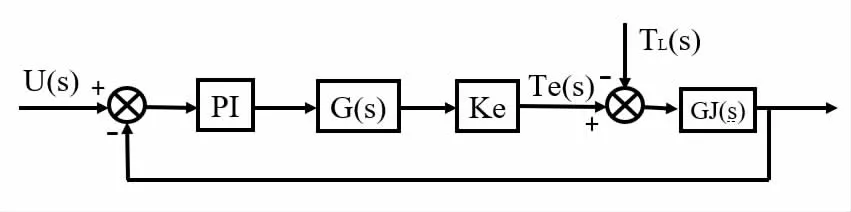
图3 速度环控制结构图
其中GJ(s)为机械部分传递函数,包含了机械谐振的速度环开环传递函数如图4 所示。其中虚线为没有谐振环节的频率响应,实线为带有机械谐振环节的频率响应。
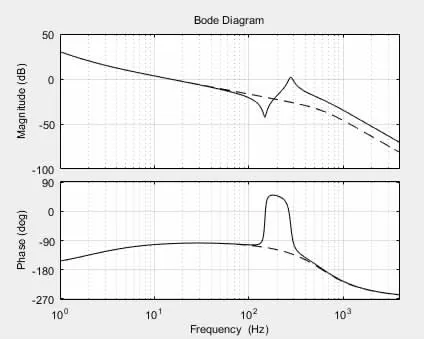
图4 速度开环频率响应伯德图
从图中可以看出,由于机械谐振的存在限制了增益的提升,因为机械谐振的存在降低控制系统的稳定裕度。
作者简介:李文庆(1981-),男,职称:高级工程师,长期从事伺服控制、精密传感、数控、机电耦合等方向的技术研究和产品开发。
2 机械谐振的抑制
2.1 基于滤波的方法抑制机械谐振
解决谐振的通常做法是在电流指令上加低通滤波器或者陷波滤波器。低通滤波的作用是降低谐振峰值处的幅频增益,但是低通滤波器增加了速度控制系统的相频滞后,减小了相频裕度。陷波滤波器是带阻滤波器的一种,传递函数为式(3)。在低频处的相移滞后要明显小于低通滤波器。陷波滤波器的频率响应波德图如图5 所示:

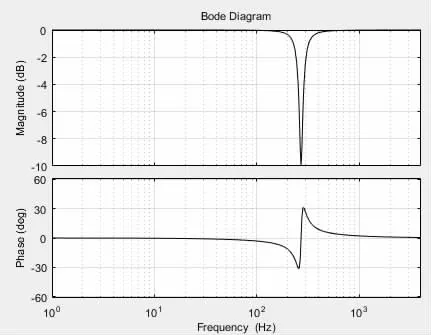
图5 陷波滤波器频率响应伯德图
使用了陷波滤波器的速度环开环频率响应如图6 所示:其中虚线是未加滤波的频率响应,实线是加了陷波滤波器的频率响应,谐振峰值增益衰减。
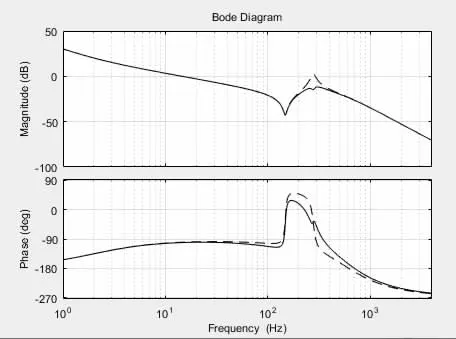
图6 使用陷波滤波的速度开环频率响应
2.2 基于模型补偿方法抑制机械谐振
陷波滤波以很小的相频滞后代价,取得很好的抑制谐振频率的幅频增益效果。从式(1)中可以看出,谐振点和反谐振点分别是由分母的二阶振荡环节和分子的二阶微分环节形成。可以将式(2)的右半部分变换成如下式:
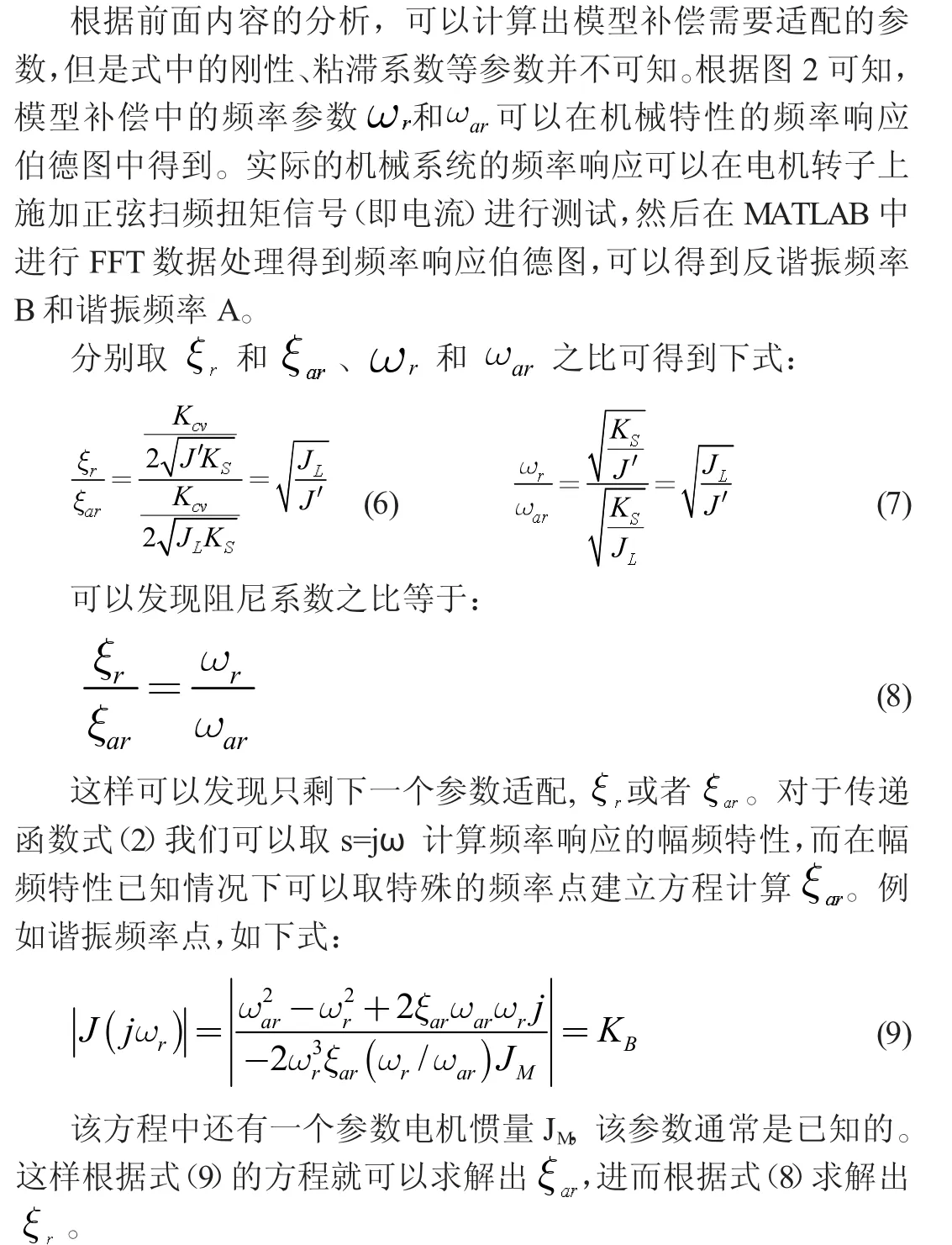
3 模型补偿参数适配计算方法
4 结论
对于机床进给轴的机械谐振问题,本文进行了双质量模型分析。提出了基于模型补偿法的抑制机械谐振,该方法克服了低通滤波对控制系统相位的影响,同时抑制了高频区域的整体幅频增益。分析推导了模型补偿参数的计算适配方法,补偿的实验结果证明该方法具有工程可行性。
