现代有轨电车运行控制技术发展和展望
2021-04-22梁浩
梁 浩
(上海富欣智能交通控制有限公司,上海 201203)
近年来,现代有轨电车在国内发展迅速。列车运行控制系统(以下简称“列控系统”)作为现代有轨电车的关键系统,经历了近10年的应用与实践,从引进国外技术系统和设备,到形成自主化、特色化的技术体系,逐渐走向成熟。本文通过回顾现代有轨电车运行控制技术(以下简称“列控技术”)的发展历程,并结合项目经验,展望其共线运营和自主驾驶两大发展方向,以期为促进其不断发展和完善提供借鉴和参考。
1 列控系统概述
在现代有轨电车的技术体系中,列控系统是一个关键系统,包含中央、车载、轨旁多个子系统,实现道岔控制、路口优先、列车定位、运营调度、维护管理等一系列关键的列车运行控制功能,从而确保现代有轨电车提供安全、准点、高效、便捷的运营服务。
2 列控技术发展情况
自 1879 年德国工程师维尔纳 · 冯 · 西门子发明第一辆以输电线供电的电动车算起,有轨电车的发展历史已过百年。在这一百多年的历史中,有轨电车经历过高速发展的黄金时代,也经历过逐渐衰落的至暗时刻。20世纪90年代以后,在车辆、控制、通信等新技术发展的推动下,现代有轨电车经过全面改造升级,凭借大运量、高速度、高舒适性、安全可靠、外观新颖、低污染、低噪声等优点,重新焕发生机。
自2012年起,我国逐步规划和培育了庞大的现代有轨电车市场,近100座城市提出建设现代有轨电车的意愿和规划,超过40座城市进行了实践。通过借鉴国外先进经验,不断迭代更新,快速提高技术水平,我国在这近10年的发展过程中逐步形成了自主化的现代有轨电车技术体系。
其中,列控技术在以下方面取得了发展。
(1)传统有轨电车的道岔控制方式多为单点控制,而现代有轨电车通过在道岔区段进行联锁进路控制,可支持更高的列车速度,适应更复杂的站场情况。
(2)传统有轨电车运行效率通常受制于平交路口的通行相位轮转,而现代有轨电车通过列控系统和市政交通系统的联动,可实现实时高效的路口优先。
(3)传统有轨电车仅在道岔区段进行列车位置检测,而如今全线的列车位置实时追踪已是现代有轨电车列控技术的标配。
(4)传统有轨电车列控系统的相关标准不完善,没有明确的安全要求,而我国目前已经制定了系统性的技术标准,明确了安全等级等一系列标准化要求。
(5)传统有轨电车以目视驾驶为基本特点,而现代有轨电车已经开始试点各种辅助驾驶手段。
3 列控技术发展展望
3.1 共线运营
共线运营是一种城市轨道交通运营模式,利用轨道交通网络的强连通性,在同一物理线路上同时运营2条或多条线路。共线运营的优点是:①节省建设资金,提高物理线路的利用率;②在共线段,有多条运营线路同时提供服务,可提高线路的服务水平;③共线段发挥枢纽作用,可减少乘客换乘次数,为其提供多样化的服务。近年来,现代有轨电车在国内发展迅速,但普遍面临单线运营、客流量偏小、运能无法充分发挥的问题,而共线运营正是提高其服务水平的重要途径。
共线运营需要从线网规划、方案设计、运营组织等多方面入手,结合线路的实际情况,制定有针对性的方案,充分发挥线路运营的潜力。其对于列控系统的设计提出了如下要求。
(1)去中心化设计,减少对控制中心的功能依赖。控制中心是运营服务的中枢,担负统管全局的重要责任,不仅要时刻监控系统设备状态和列车运营情况,还需在故障和应急场景下及时做出判断和响应。为此,列控系统的设计应尽可能降低对控制中心的依赖,分散控制中心的压力和责任。
(2)以调度员为核心打造列控系统,加强对调度员工作的辅助力度。共线运营的服务水平在很大程度上取决于调度员工作的质量,因此需要针对调度员工作的特点进行定制化的开发和设计,减轻其压力和负担。
(3)安全、可靠和高效的枢纽道岔区段控制设计。在共线运营的过程中,共线段承担着多条运营线路的运营任务,各条运营线路的列车会频繁进入和离开共线段,列车的交汇和分流是运营的关键点,因此共线段两端的道岔区域发挥着线路枢纽的作用。设计安全、可靠和高效的枢纽道岔区段控制系统,成为实现共线运营的关键。
下面将结合武汉光谷现代有轨电车T1/T2线项目(以下简称“光谷有轨电车项目”)实例,介绍其具体实践经验。
武汉光谷现代有轨电车T1/T2线是华中地区首条网络化建设的现代有轨电车线路,线路走向如图1所示,其中T1线起点为华中科技大学站,终点为高新六路站,全长16.803 km;T2线起点为城铁汤逊湖站,终点为光谷植物园站,全长19.902 km。2条线路在中部交汇形成共线,从当代国际花园站至工程大学流芳站,共线段全长2.526 km。T1和T2线使用同一控制中心进行集中调度,控制中心位于流芳车辆基地。T1/T2线的线路配置使其能够采用跨线多交路的运营模式,提供灵活的运营服务。以共线段为中心,选择不同的起点和终点,最多可支持6条不同交路的穿插运营。
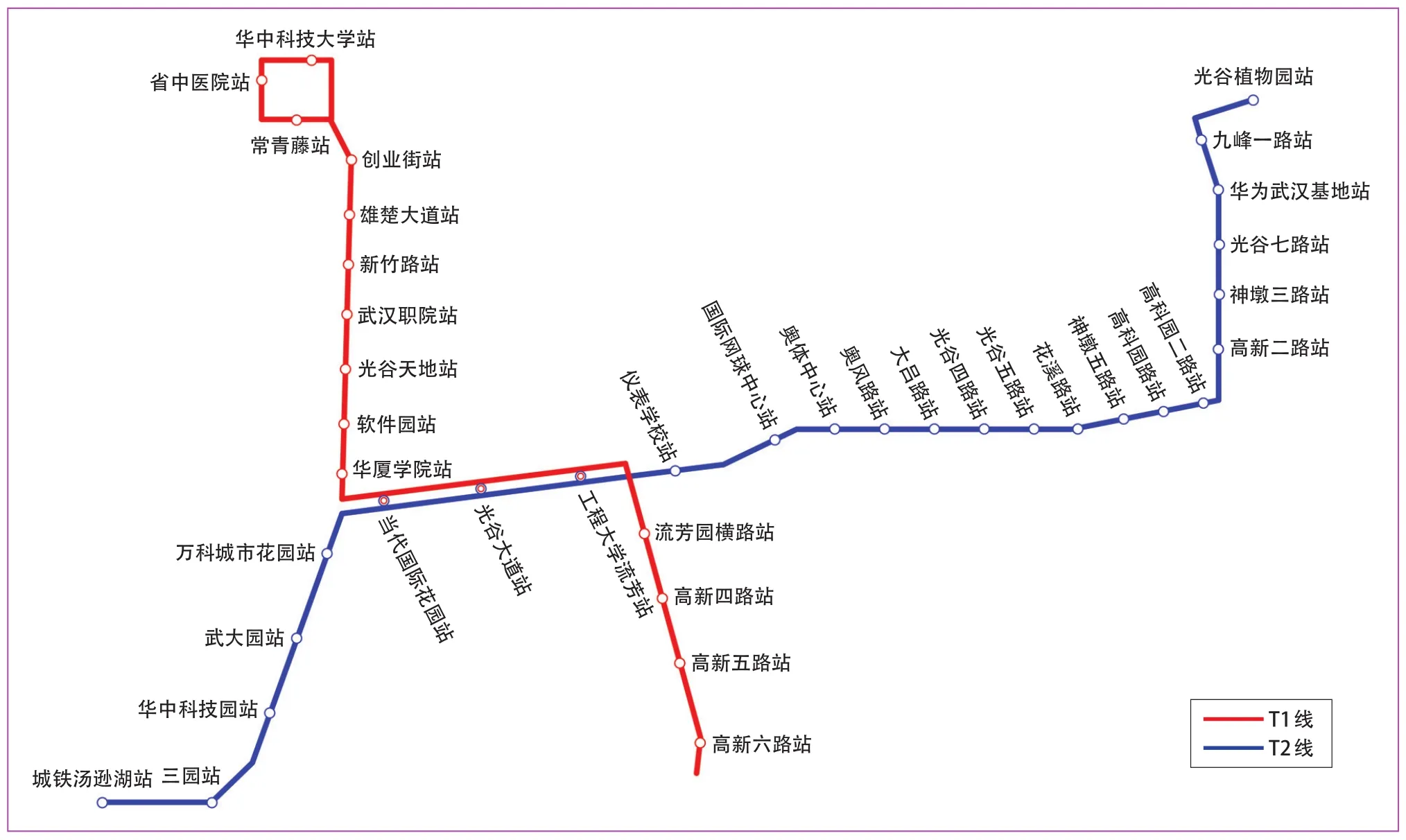
图1 武汉光谷现代有轨电车T1/T2线线路图
针对武汉光谷现代有轨电车T1/T2线共线运营的特点,其列控系统进行了以下创新和改进。
(1)沿线岔区的进路办理是列控系统的重要功能。在当前的列控技术中,进路通常为系统自动办理,以减少驾驶员和调度员的工作量。在光谷有轨电车项目中,列控系统将进路自动办理的功能下放到车载子系统,由列车根据自身的运营任务,自主触发进路的办理。在共线运营的应用场景下,车载子系统自动办理进路模式可减少对控制中心的依赖,实现列车对运营任务的自主处理,从而消除了网络的核心节点,即使控制中心出现单点故障也仅对部分列车或部分区域产生影响,而不会危及全线网的运营,最大限度地保持了系统能力。
(2)光谷有轨电车项目中,还针对调度员的工作特点,对列控系统进行了一系列定制化开发和设计。例如,优化运营调度系统的时刻表相关功能,支持多交路的时刻表编制、管理和追踪,调度人员可根据需要,选择不同的运营线路,分别编制时刻表;设计灵活的权限管理,在全线划分出不同的控制区域,管理权限可以单独申请、授权和转移,一旦发生突发事件,调度员之间还可以灵活地转移控制权限,从而加大调度资源的投放,提高对突发事件的响应速度,加快运营的恢复。
(3)为设计安全、可靠和高效的枢纽道岔区段控制系统,光谷有轨电车项目在枢纽道岔区段采用双系热备系统架构,确保单系故障时控制的无缝切换,以此提高系统和产品的可靠性指标,减少单点故障的影响范围。同时,根据各条股道的实际土建条件,在确保安全的情况下(如保证列车间隔、制动距离等),采用短进路的设计方案,即将枢纽道岔区段化整为零,分段防护,缩短进路长度,使道岔的轮转更加灵活。
光谷有轨电车项目于2018年4月正式开通运营,初期先开通交路1和交路2,运营至今,系统运转正常,客流稳定,共线运营的效果已初步显现。根据运营计划和安排,其他几条交路也将逐步投运。交路的增加将进一步提高线路的复用效率和服务能力。
3.2 自主驾驶
3.2.1 机遇和挑战
在乘客出行需求不断增长以及交通环境日益复杂的情况下,采用目视驾驶模式的现代有轨电车面临诸多挑战。然而,当前快速发展的自动化控制技术也为其带来了破局的机会。
自动化控制技术早已应用于轨道交通领域。在目前基于通信的地铁列车控制技术中,列车自动驾驶(ATO)系统已是标配,全自动运行(FAO)系统也在快速推广,从而积累了大量的实践经验。
然而,与在封闭行车环境下独立运行的地铁不同,多数现代有轨电车线路为混合路权,在平交路口和混行区域,列车是在开放式的复杂行车环境中运行。这使现代有轨电车的自动化控制面临着新的挑战。而随着以传感技术、大数据、人工智能(AI)算法为核心的新技术的快速发展,以智能化和自主化为特征的汽车自动驾驶技术发展迅猛,该技术可依据实时获得的外部环境信息,进行自主感知、自主判断、自主控制,因此能够适应开放的道路交通环境,从而也为实现现代有轨电车的自动化控制提供了参考。
3.2.2 发展阶段
根据国际公共运输联合会(UITP)的定义,轨道交通列车自动化等级(GoA)分成5等,从GoA 0的目视运行到GoA 4的无人值守,如图2所示。汽车行业遵循国际标准LEVELS OF DRIVING AUTOMATION ARE DEFINED IN NEW SAE INTERNATIONAL STANDARD J3016的规定,将自动驾驶分为6个等级(SAE Level),从SAE 0的目视驾驶到SAE 5的自主驾驶(图2)。从两者的等级划分可知,尽管行业不同,但其自动化等级的发展阶段基本一致,均从目视驾驶开始,然后逐步提高智能化水平(从辅助驾驶到自动驾驶),最终实现自主驾驶的目标。参考轨道交通和汽车行业自动化等级的发展路线,可为现代有轨电车自主驾驶技术的发展制定从辅助驾驶到自动驾驶、再到自主驾驶的技术演化路径。
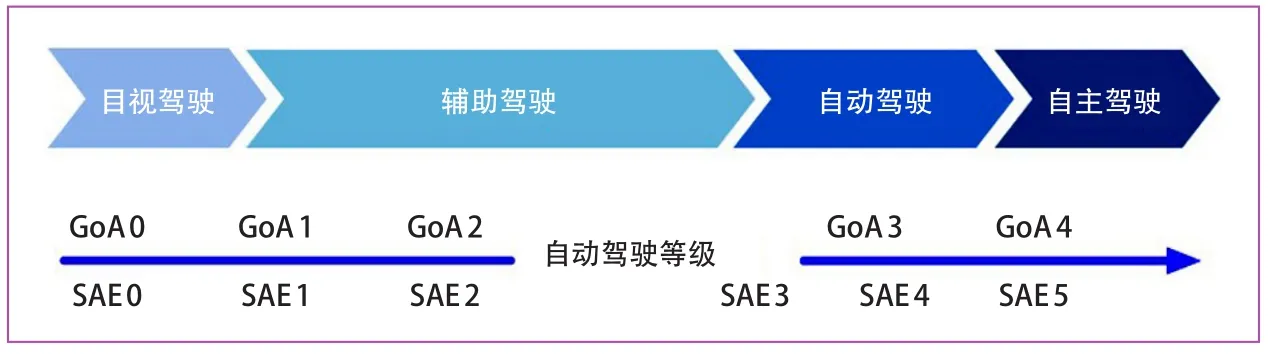
图2 自动驾驶等级
现代有轨电车自主驾驶发展的第1阶段为辅助驾驶。梳理整合现代有轨电车辅助驾驶系统的功能需求和功能类别,在该阶段有以下可行的技术方案。
(1)DAS-C(Driver Assistant System-Control)方案:在驾驶员目视驾驶的基础上,增加控制功能,在危险场景下(如列车超速、闯红灯时)进行制动防护。
(2)DAS-W(Driver Assistant System-Warning)方案:基于感知技术构建障碍物探测系统,为驾驶员提供冲突(防撞)告警,并丰富驾驶辅助信息,帮助驾驶员进行预判。
(3)DAS-O(Driver Assistant System-Operation)方案:结合ATO算法原理,依据信号系统的路径规划和列车实时追踪数据,生成诸如目标距离、建议速度、限速区提醒等动态行车信息,辅助驾驶员完成运营任务。
现代有轨电车自主驾驶发展的第2阶段为自动驾驶。自动驾驶可根据路权情况分为封闭路权下的自动驾驶和混合路权下的自动驾驶,具体如下。
(1)封闭路权下的自动驾驶,基本沿用了基于通信的列车自动控制(CBTC)系统的ATO成熟方案,可以应用在特定的封闭路权环境中,如快速有轨电车系统。
(2)混合路权下的自动驾驶,是现代有轨电车最具特点的“基本面”,在地面交通环境中有驾驶员监督的条件下,由列控系统控制列车安全运行。
现代有轨电车自主驾驶发展的第3阶段为自主驾驶,即在各种交通环境条件下,由列控系统控制列车自主安全运行,这是列控系统发展的最终方向和目标。
3.2.3 技术方案
由于现代有轨电车的自主驾驶情景兼具轨道交通和道路交通的特征,又有其特殊之处,因此其自主驾驶必须挖掘自身特点,在轨道交通和道路交通行业经验的加持下,走出自己的道路。
驾驶的本质在于“规划 — 感知 — 控制”3个主要环节,而自主驾驶方案的关键在于,借助技术力量分别解决这3个环节的智能化问题。现代有轨电车自主驾驶技术方案以下列3类技术为基础,如图3所示。
(1)现代有轨电车既有列控技术。现代有轨电车作为公共交通的一员,出于运营服务的目的,其行车路径具备高计划性、周期性重复、可预测行强的特点,在路径规划上有天生优势。在日常调度管理过程中,既有列控技术通常采用时刻表/运行图工具,对列车的运营任务进行提前规划和设置,并实时追踪列车的执行情况,监控实际运营服务中对时刻表/运行图的兑现指标。在具体项目的实践过程中,如上文所述的光谷有轨电车项目,还对现代有轨电车列控系统进行了有针对性的定制化开发,使时刻表/运行图工具可以更灵活地适应互联互通共线运营的具体需求,以提高运营计划的灵活性。这都是在过去10年的既有项目中积累和沉淀下来的技术基础。
(2)基于车车通信的列车自主运行系统(TACS)。TACS是当前城市轨道交通的一大技术发展趋势,在传统移动闭塞的基础上,立足于车车通信技术,进一步简化架构,将区域控制器(ZC)引入车内,从而使列车之间能够自主交互行车资源,实现列车的自主计算、移动授权,并根据移动授权的计算结果,控制列车的行车动作。目前,青岛地铁列车自主运行系统(TACS)示范项目已经顺利通过了工程应用前的专家评审,完成了产品级的开发和验证,其发展经验可以移植到现代有轨电车的自主驾驶技术方案中,大幅提高列车运行控制的智能化水平。
(3)汽车自主驾驶感知技术。汽车自主驾驶技术方面的研究成果,尤其是感知技术,为现代有轨电车自主驾驶技术方案补上了最后一块基石。通过将视觉传感器、毫米波雷达、激光雷达相融合的多传感器感知技术方案,列车可以识别前方障碍物(包括固定和移动障碍物)及其状态,综合分析和判断列车行进路线上的障碍物信息,并根据这些信息实时计算移动授权的距离并进行安全防护。

图3 现代有轨电车自主驾驶技术基础
该技术方案首先立足于现代有轨电车既有列控技术,充分利用中心系统的路径规划功能,为列车规划运行路径,并实时监控列车位置;其次,借鉴汽车自主驾驶的感知技术方案,赋予列车自主识别前方障碍物的能力,并基于车载地图进行映射,作为列车移动授权的计算输入,从而使列车能够根据移动授权和运营任务实时计算其移动的目标距离和目标速度,并自动控制其行车、进站、启动、折返等过程;同时,基于TACS技术,运控系统能够实时获取行车线路中关键资源(道岔、信号机、前方列车等)的状态信息,为行车提供有序调度和安全防护。
4 总结
现代有轨电车列控技术涉及安全、软件、硬件、平台、应用、数据、工具、运维等多个技术领域,在各领域技术发展的推动下,该技术也在与时俱进,不断迭代更新。本文仅对其应用层面的技术进行了介绍和展望。技术发展如同物种进化,与外界环境密切相关,政策环境、经济周期、市场机遇、基础技术水平、竞争压力等条件都是制约因素。新技术的种子已经发芽,能否成长为参天大树,还需要整个行业的支持推动和同业者的共同努力。
