伸缩臂履带式起重机力矩保护
2021-04-22何喜东韩晓东付韵豪张清珠
何喜东,韩晓东,孙 浩,付韵豪,张清珠
(1.浙江三一装备有限公司,浙江 湖州 313000;2.湖州师范学院工学院,浙江 湖州 313000)
伸缩臂履带式起重机广泛应用于各行各业,能够完成重物转移的任务[1]。伸缩臂履带式起重机在工作的时候,由于操作失误或者超载会发生翻车甚至垮塌。根据分析调查,大部分工作事故都是过载造成[2]。为了保证工况稳定和操作者安全,研发人员开发了许多功能各异的装置来监测、规避超载情况的发生[3]。现有的技术大多是通过改进力矩限制器来优化监控能力[4]。周建明等[5]发现SCC4000 型履带起重机上的RCI-8200型力矩限制器使用6 年后,在空载的状态下都经常显示过载,大部分时间都只能在安全模式下工作,造成力矩显示器功能失效,如果更换的话费用达10 多万元,所以该作者对故障进行了排查维修,但这也需要耗费大量时间和精力。因此,针对以上问题本文运用特殊算法,针对25TB 伸缩臂履带式起重机在不对装置进行修改的情况下进行算法计算。在算法适用的情况下,监控变幅油缸力是否超过倾翻载荷来判定是否超载,来达到提前预警的目的,保护了操作者的安全。
1 力矩保护技术路线
力矩保护技术路线如下:①根据倾翻稳定性计算临界载荷;②根据临界载荷计算临界变幅油缸受力;③作业时实时监测变幅油缸力,判断是否达到倾翻载荷,若超过则提前预警,从而保护操作者和起重机的安全。
2 最大倾覆力的计算
最大倾覆力的计算可分为两种极限下的算法,分别是不考虑副臂的计算和极限状态下的计算。
2.1 不考虑副臂算法
不考虑起重机副臂时,在理论的极限状态下,以第一个支重轮作为倾翻点,对其进行受力分析,如图1 所示。可以得出相对于臂根点的力矩平衡方程如下。

图1 不考虑副臂的算法


式中W1——除去臂架和载荷后的车重相对于臂根的力矩,tm;
W2——臂架自重相对于臂根的力矩,tm;
W3——载荷相对于臂根的力矩,tm;
G1——除去臂架和载荷的车重,t;
G2——主臂自重,t;
L——固定值,m;
L3——需要根据实时臂长查表,m;
L4——固定值,m;
L5——固定值,m;
L9——臂长,m;
P——极限倾翻载荷,t;
C——夹角,°;
A——夹角,°。
G1、G2、L、L5为25TB 型号的固定值,已在下文表2 中已经列出。
联立上式可得极限倾翻载荷P

极限倾翻额定载荷P0

式中FI——臂架折算到臂头的重量。
对图1 右侧履带式起重机理论模型对臂架的力矩进行受力分析可得:

式中F——变幅油缸力,t;
L8——油缸力相对于臂根的力臂,m;
L6、L7、D、E见图1,均为定值,在下文表2 中已列出。
根据式(4)可得,不考虑副臂时的变幅油缸力

根据计算得到油缸长Lo为

2.2 极限状态下的算法
极限情况如图2 所示,即起重机的起重臂伸缩到最极限的长度。
还是以第一个支重轮作为倾翻点,进行受力分析,可以得出相对于臂根点的力矩平衡方程如下
式中G3——副臂自重,t;
W3——载荷相对于臂根的力矩,tm;
P——极限倾翻载荷,t。
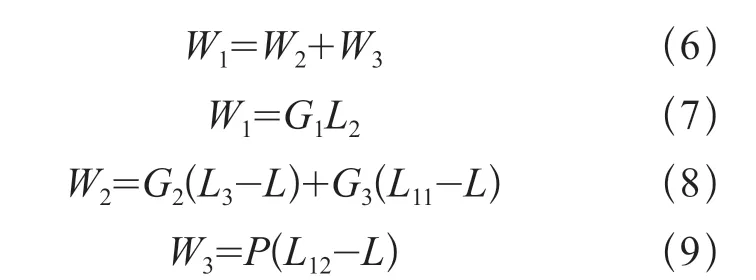
由式(6)~式(9)可得极限倾翻载荷P

式中:L3需要根据实时臂长查表,m;G1、G2、G3、L、L2为25TB 型号的固定值,已在下文表2 中已经列出。
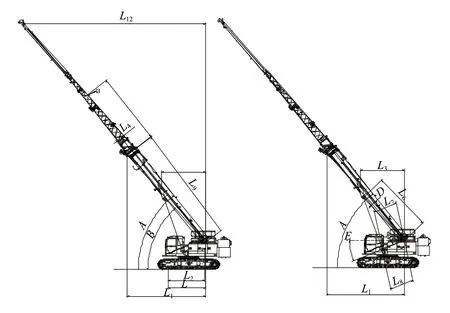
图2 极限状态的计算
取安全系数1.33,计算极限倾翻额定载荷P0

极限状态下,关于臂架的力矩平衡方程

式中F——变幅油缸力,t,计算变幅油缸力F时,将臂架自重都除1.1,模拟动载冲击量;
L8——油缸力相对于臂根的力臂,m;
L11——副臂重心到臂根的距离,m。
此处油缸长Lo和L8已在不考虑副臂算法中计算出。
根据式(12)可得,极限状态下的变幅油缸力

3 实验数据分析
以极限状态下的算法为例,其基础数据与臂架坐标系的数值如表1 所示。

表1 25TB起重机基础参数
根据上面推导的极限状态下的算法公式,得到结果如表2 右侧所示。表2 中列表的L9可取表1中臂长的不同值,现在以臂长L9为10.9m为例,其余都为测算出来的数值或定值,列表右侧为通过计算得到的数值。
将文中提出的新算法应用于25TB 型伸缩臂履带式起重机,得到的试验结果如图3 所示。图中虚线为原策略,实线为本文所提出的新算法。原策略是通过理论计算得出,在理论计算时应用了一些假设,比如变幅油缸的重量重心是恒定的,臂架不考虑带载时的变形、冲击和加速度,为了使设备更加安全,人为地增加了一个安全系数,根据这个安全余量再进行反向推导出载荷。本文提出的新算法无需对整车各个部件进行假设,而是通过实时检测变幅油缸的压力来反向推导出载荷,一旦超过提前设定的预警值(通过实验得出),整机只有向安全的方向运动才有动作,否则所有其它操作被强制锁定,从而达到安全预警的目的。通过进行实验发现采用新算法能保证25TB 型伸缩臂履带式起重机在极限的情况下确实能够在监控变幅油缸力来判断是否达到倾翻载荷来提前预警。

表2 计算结果
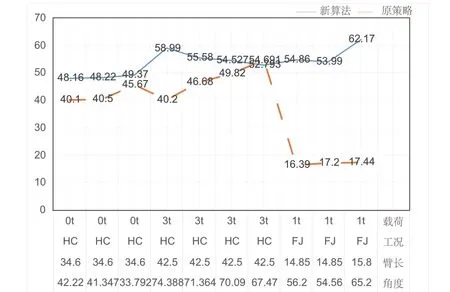
图3 结果对比图
4 总结
本文以25TB 型伸缩臂履带式起重机为例,为解决起重机超载和工作下易发生事故的难题提出了一种新算法。该方法通过计算倾覆稳定性的临界载荷,推导出临界变幅油缸力。再经过理论计算和数据分析,判断起重机在极限工况下变幅油缸力是否达到倾翻载荷,进行实时监控与提前预警,试验验证明这种算法可以实现起重机动态力矩保护。