气垫平台破冰阻力的模型试验研究1)
2021-04-22田育丰
黄 焱 孙 策 田育丰
(天津大学水利工程仿真与安全国家重点实验室,天津 300350)
(天津大学港口与海洋工程天津市重点实验室,天津 300350)
引言
气垫平台的基本原理是利用垫升风机将高压气流导入平台底部,进而形成动力气垫,将平台垫升脱离支撑面[1-2].自1948 年,英国科学家、气垫船之父克里斯托弗提出气垫船的设计思想以来,已发展出全垫升式气垫平台、侧壁式气垫船、双体式气垫船等各具特色、功能多样的结构型式[3-5],广泛服务于军事、水利和航渡等诸多领域[6-8].
将气垫平台用于河流破冰的概念始于一次偶然事件.在1971—1972 年的冬季,研究人员在位于加拿大耶洛奈夫市的大奴湖(大斯雷夫湖)内,开展了一项将气垫平台ACT-100 改装为北极地区钻井平台的试验,但是在移动该气垫平台时意外发现其拥有不错的破冰能力,试验现场将0.76 m 厚的冰层破坏[9-10].为此,加拿大研究人员对气垫平台的破冰效果进行了多次尝试,先后在环北极的雷鸣湾、帕里湾、多伦多和蒙特利尔进行了气垫平台的破冰试验,均取得了较好的破冰效果.如图1(a)所示为ACT-100 气垫平台在图克托亚克图克进行绞车拖拽破冰试验的照片,该试验中冰层厚度为60 cm,可以观察到一条比平台更宽的航道被开辟出来.之后,加拿大海岸警卫队于1975—1976 年,在雷鸣湾以轻型破冰船亚历山大·亨利号顶推ACT-100 平台的方式,实现了以6.5 kn(1 kn=1.852 km/h)航速有效破坏40 cm 厚的平整冰[11]见图1(b).美国则利用CCGS Waban-Aki 气垫船在圣劳伦斯河,开展了气垫船在低航速条件下的破冰试验,同样取得了较好的测试效果[12].Hinchey 等[13]对加拿大20世纪70 年代所开展的大量气垫平台破冰试验进行了总结,并将气垫平台的破冰模式按照航速不同,划分为低速破冰与高速破冰两种模式.在低速破冰模式下,平台会首先促使冰面下形成一个气体空腔,并在随后接触冰面的运动过程中导致冰体的破坏.在高速破冰模式下,平台则以冰面上高速运动的形式,产生大振幅的重力波,进而引发冰排破坏.俄罗斯针对气垫平台的低速破冰模式开展了大量有益工作.Kozin 等[14]对气垫破冰船的共振破冰机理进行了较为深入的研究,在研究中将气垫平台结构简化为一个运动载荷,将冰水介质简化为半无限冰面和半无限水面模型,从而推导出弯曲重力波在冰面的传播特性,以及利用共振法破冰的可能性.Zhestkaya 等[15]将积分变换方法和有限差分混合算法相结合,研究了冰排在遭受不同载荷冲击时的变形过程,计算了冰排在单点脉冲作用下的挠度.其他各国学者也针对气垫平台破冰这一新技术开展了大量的研究工作[16-24].
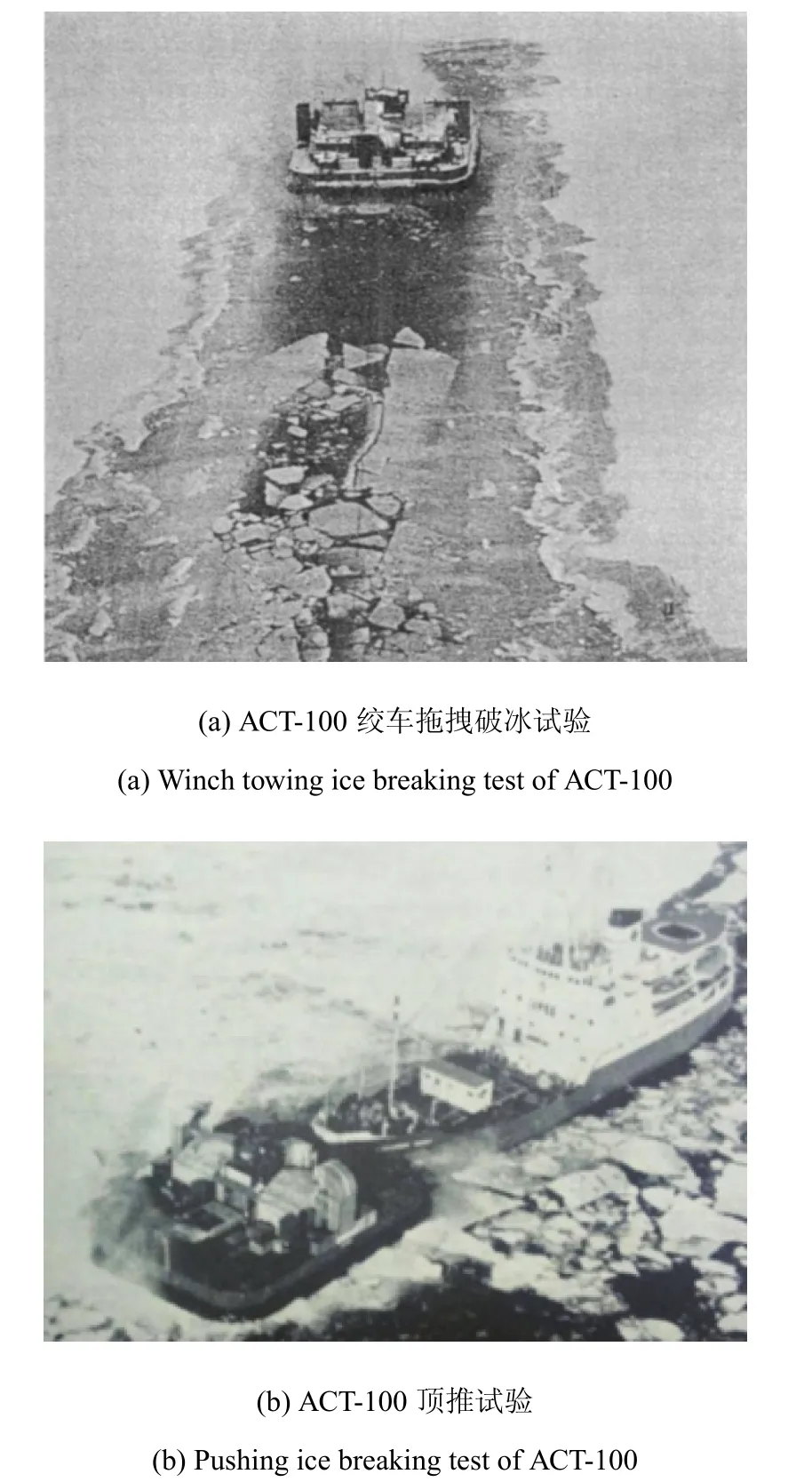
图1 ACT-100 破冰试验Fig.1 ACT-100 ice breaking test
Takizawa[25]在研究移动载荷对浮冰层下沉位移的影响时提出了临界速度的概念,并将导致冰层下沉位移最大且下沉范围最小时的载荷移动速度定义为临界速度.卢再华等[26-28]对气垫船位于冰面上高速航行时的破冰过程进行了研究,利用LS-DYNA 模拟了气垫船以临界航速(11 kn)及超临界航速在冰面的运动,得到了由船体运动所激励的冰面兴波及应力变化规律.研究结果表明:当船速超越临界航速后,船体将不断超越先前形成的兴波波峰,从而对兴波的冰表面传播形成反作用,不利于兴波破冰;当船速小于临界航速时,船体始终位于早前激励的兴波后方,且新产生的兴波将推动早前产生兴波的扩展,有益于兴波破冰.刘巨斌等[29-30]同样对冰面兴波问题开展了研究,利用求解船舶兴波的Rankine 源计算方法,计算了气垫船在冰面上高速航行时的兴波和冰层变形,并对兴波阻力进行了求解.李宇辰等[31-32]基于黏弹性薄板假设和势流理论,参照中国黄河实际冰层情况,模拟了气垫船在亚临界速度、临界速度(11 kn)和超临界速度于冰面上的航行情况,对不同状态下的冰面兴波传递、冰层应力变化及破冰效果进行了计算分析.薛彦卓等[33]基于重力流理论,将气垫船下方的气垫压力假设为均布载荷,开展了数值仿真工作,得到了气垫压力与最大破冰厚度的关系,为气垫平台的设计提供了有益参考.张志宏等[34-35]基于弹性薄板振动微分方程和相似理论,建立了气垫船在冰面航行时振动波形传播的相速度和群速度计算公式,得到了冰--水系统波动传播的相速度和群速度.继而采用聚氨酯(PU)薄膜材料模拟冰面,开展了模型试验研究,分析了气垫速度、高度、压力及水深等参数对冰排的动力响应影响,揭示了兴波激励冰面变形响应的聚能共振增幅机理,为气垫船的实际应用提供了基础理论及试验数据.
综上所述,学术界在气垫平台的高速破冰机理认识上已基本清晰,即在移动载荷激励冰层引起的聚能共振增幅效应下,形成了冰面兴波进而引发冰排破坏.而对于低速破冰机理,仅存在一种初步的认识,即平台在水面的全垫升状态下,会形成水面兴波,波动在向冰下水体的传播过程中会诱发冰下气腔的形成,导致冰排丧失水体的弹性支撑作用,进而促进了平台后续破冰过程.也就是说,在低速破冰模式下,促使冰排破坏的关键由高速模式下的冰面兴波转化为了冰下兴波.然而,已有大量研究表明,开敞水域波浪在向有冰覆盖水域传播时,会发生快速的能量耗散,难以形成聚能效应,而高速气流随水面波动向冰下的汇集过程,也尚未得到有效的测试和论证.同时,有影像资料表明,乌克兰一座最新投入使用的破冰平台,是以一种非全垫升模式来实现破冰操作的,如图2 所示.该气垫平台专为破冰作业设计,不同于以全垫升姿态进行破冰作业的常规气垫平台,该结构主体设计为倒锥台形状.在开敞水域保持全垫升状态,进入破冰作业模式后即在设计吃水条件下破冰航行.气垫平台倒锥台的线型能够形成对冰排的有效下压作用.这种操作模式的出现,说明上述关于低速破冰机理的初步认识是不全面的,甚至可能是错误的.
由此可见,气垫平台的低速破冰机理是尚待探索的,尤其是垫升状态与冰下气腔形成过程间的关联性.因此,为了充分解析乌克兰该型破冰专用气垫平台的设计思路,探索在全垫升和设计吃水条件下气垫平台的低速破冰机理,以该型破冰气垫平台为原型,开展了气垫平台低速破冰的冰水池模型试验.本文将在对模型试验测试内容及结果进行介绍的基础上,开展机理性讨论.
1 模型试验概述
1.1 试验设施
本文开展的模型试验在天津大学冰力学与冰工程实验室内完成如图3.实验室低温空间面积为320.0 m2,用于容纳拖曳冰水池进行模型试验.冰水池长40.0 m、宽6.0 m、深1.8 m,制冰能力为1.0∼30.0 cm.实验室制冷系统包括制冷压缩机组和冷风循环系统.其中,制冷压缩机组主要由3 台压缩机组成,具有制冷量大、自动化程度高、温差控制精准、节约能源等特点,可使试验中的制冰温度在0◦C ∼−25◦C 范围内精准调节.冷风循环系统主要包括10 台风机和多级强迫分压均匀送风顶棚等,可令到达水面(或冰面)的冷风风速小于0.5 m/s,从而控制室内同高度位置温差小于1.0◦C.
除制冷系统外,实验室的主要试验设施还包括试验拖车和服务拖车.其中,试验拖车通过齿轮齿条的啮合传动,拖车车速可以在0.001∼1.0 m/s 的范围内无级调节,也可在规定的速度下恒速行驶.服务拖车主要用于辅助模型冰的制备和测量,以及在一些试验中推动冰排冲击模型.服务拖车车速可以在0.001∼0.5 m/s 的范围内无级调节.
1.2 相似律和相似比尺
冰模型试验是一种相当特殊的试验,因为它同时具有流体模型试验和材料试验的特点,因此选取适当的相似律是指导冰模型试验研究的关键.在本文气垫平台破冰阻力模型试验中,需要模拟冰排在平台结构前的破坏和后续碎冰的运动,其中包含了惯性力、重力、气流压力、静水与动水压力等众多力学过程,涉及空气、水、冰及柔性材料等多种介质的相互作用.目前,尚不存在一种同时适用可压流体与不可压流体的相似理论及准则,这就需要聚焦试验中核心的物理过程,以此选定相似律.本研究的目的在于探索气垫平台破冰机理,因此试验中关注的核心物理过程是冰在气垫平台压力作用下的弯曲破坏,这就意味着惯性力、重力和弹性力的作用占主导地位.同时,尽管在气垫平台与冰的相互作用过程中,可压缩气流的压力变化也具有重要的影响,但这种影响在一定程度上可以用气垫船的垫升高度或吃水深度来表征,而不必追究气压参量所遵循的相似律.据此,试验中对于各项物理参数的设定采用遵循弗劳德和柯西相似律的方式进行.
弗劳德数Fr假定重力和惯性作用占重要地位,即遵循水流试验的几何相似、运动相似、动力相似和边界条件相似的准则,在动力相似中,要满足重力相似的要求.弗劳德数Fr由惯性力与重力比值的平方根来定义

柯西数Ca假定弹性力和惯性作用占重要地位,即在动力相似中,要满足弹性力相似的要求.柯西数Ca由惯性力与弹性力的比值来定义

试验中采用的几何缩尺比λ=1:5,得到的气垫平台模型结构参数,如表1 所示.
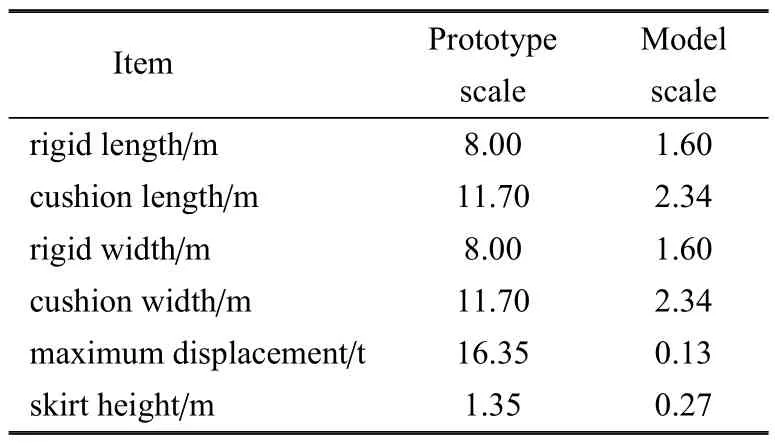
表1 气垫平台模型结构参数Table 1 Structure parameters of air cushion platform
继而根据几何缩尺比λ 和选定的相似律,进一步确定其他物理参数详细的相似比尺关系,如表2 所示.
1.3 试验模型
如前所述,本文的试验原型为一座乌克兰现役的破冰平台,原型结构如图4 所示.该平台整体结构呈倒锥形,两台垫升风机对称的布置于平台甲板,多组手指气囊相连形成围裙.平台内含独立的气道结构,用于接收垫升风机吹出的高压气流,并向围裙内提供气压一致、流量相同的高压气体.此种结构使得围裙内部气压分布均匀,继而诱使由气囊吹出的高压气体流量与气压基本一致,有利于平台的垫升平衡性及操纵性.该型气垫平台的破冰作业模式与常规设计不同,并不是以全垫升姿态航行,而是在设计吃水条件下破冰航行.为深入研究两种不同垫升状态下结构的破冰过程和机理,本文先后开展了两个系列的模型试验研究,即全垫升破冰试验与非全垫升破冰试验.
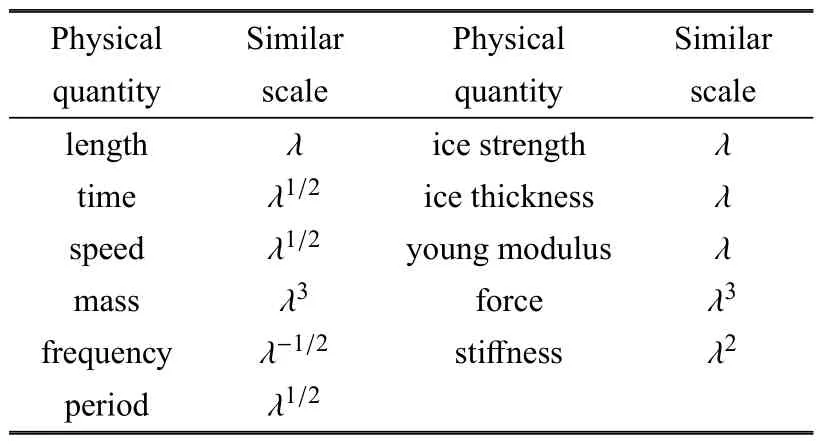
表2 主要物理量的相似比尺Table 2 Similar scale of primary physical quantities
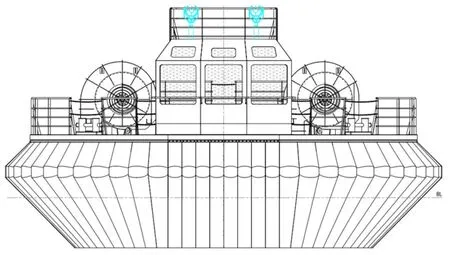
图4 气垫平台原型Fig.4 Air cushion platform prototype
依据气垫平台原型结构特征,模型结构设计包括不锈钢制支撑框架、围裙和气道结构3 部分.
根据试验模型的尺寸要求及重量要求,确定平台模型支撑框架由不锈钢加工而成,如图5(a)所示.设计过程中考虑了该框架所需具备的两种功能:一种功能是为气垫平台围裙构造型式提供依托基础;另一种功能是为气道结构提供基础支撑.同时,考虑到试验过程中的拖曳作业要求,该结构还需预留出用于平台拖曳的横向牵引梁,并进行了局部加强.
根据原型围裙制式特征及模型不锈钢制支撑框架的特点,试验模型的围裙的设计分为两类、8 块子围裙.第一类为直边手指围裙,共有4 块;第二类为扇形区手指围裙,同样有4 块.利用强度高、延展性好的特种材料加工围裙.围裙通过高气密性的特殊工艺与不锈钢支撑框架相连,同时,不同类型、不同部位的围裙采用该工艺拼接为统一整体.
根据原型气道结构及模型结构特点,并充分考虑模型重量、不锈钢制支撑框架外形及制作流程等因素,选用密度小、柔韧度高的特种板材进行气道结构的加工制作,最终形成与原型相同的气道布置规则.气道结构与不锈钢支撑框架的连接同样进行了气密处理.
根据平台支撑框架、围裙及气道结构的重量,对垫升风机的重量和出口流量进行选型.选型工作的技术要点在于根据模型结构尺寸及重量选择垫升风机的结构尺寸、重量、出口流量及功率.采用经验公式法对相关参数进行估算[36]

式中,Q为风机出口流量,单位为m3/s;a=5 ∼10 m3/(s·kg),考虑到本试验需根据各部分设计进行风机的适配选型,在此选取a=10,以最大满足风机的适用范围;W为平台质量,单位为kg.最终选定某型涡轮风机,并以此为基础进行改造.改造工作主要是将涡轮风机的变频电机换装为伺服电机,通过精准控制风机转速,细致调节风机出口的流量和风压,从而使平台模型达到缩尺后的飞高参量(即垫升高度)要求,形成与原型一致的垫升状态.原型平台在水平面内的重心位置在结构的几何中心处,垂向上的重心位置在设计吃水位置以上1.07 m.在模型试验中,非全垫升工况下气垫平台模型的重量与原型平台的最大排水量相对应,重心位置与原型平台的重心位置相对应.由于全垫升状态并不是原型气垫平台的设计破冰模式,在全垫升工况下仅保证平台垫升姿态和有效飞高与原型相似.装配成型的气垫平台模型如图5(b)所示.
1.4 拖曳装置与测试系统
试验采用拖车拖曳平台模型穿越冰盖的方式进行,如图6 所示.结构模型通过刚性拖曳杆与试验拖车相连,在刚性拖曳杆两端均连接有万向节,以保证气垫平台在垂向与横向上可以自由运动.在此基础上,刚性拖曳杆在水平面内的运动通过两条弹性缆绳限制,从而抑制平台模型的艏摇和横荡运动,使平台模型保持航向.因此,在此拖曳模式下,气垫平台模型的艏摇、纵荡和横荡运动是受限制的,而纵摇、横摇和垂荡运动基本不受影响.
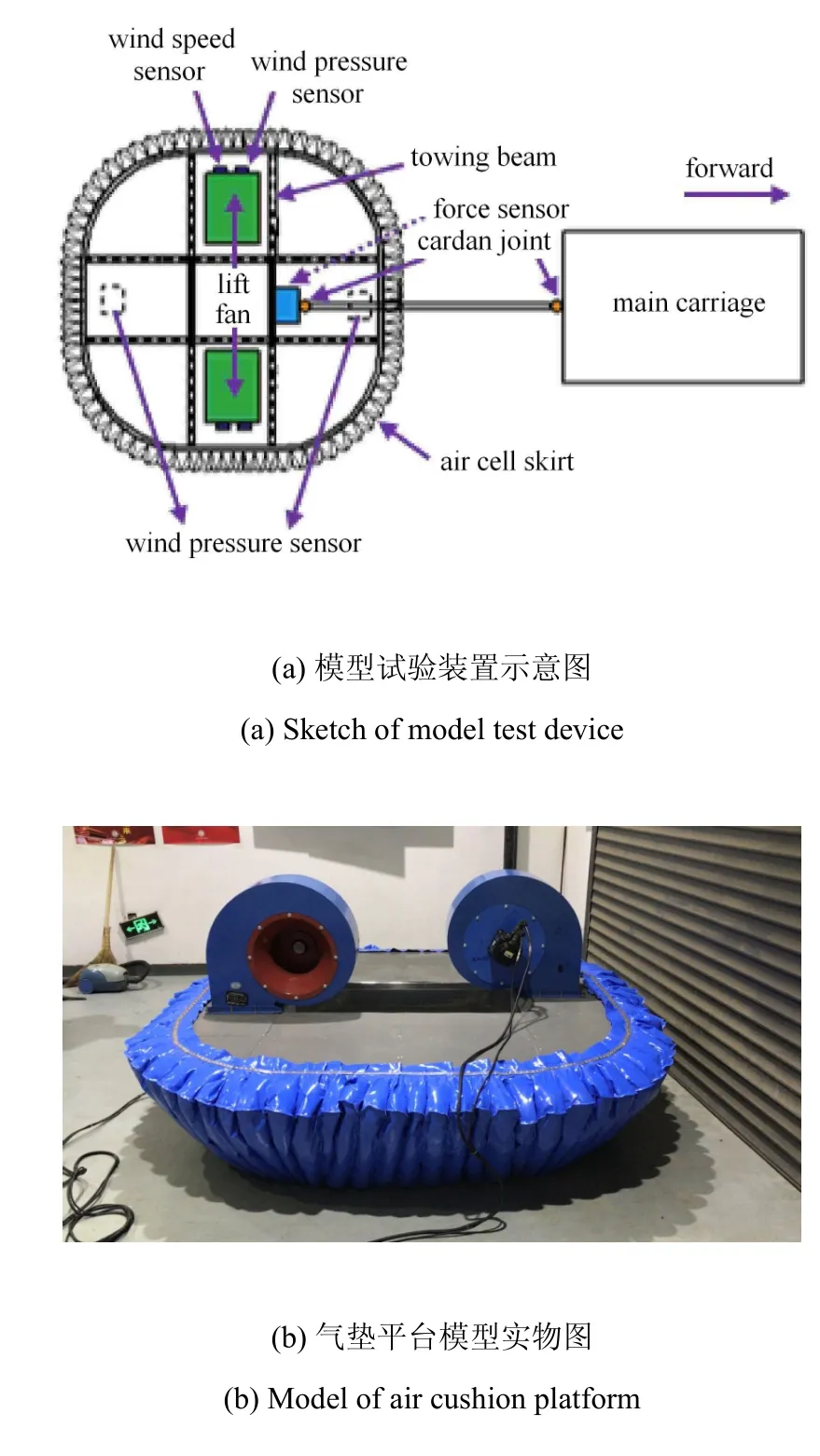
图5 气垫平台模型Fig.5 Air cushion platform model
在试验过程中,垫升风机通过气道向围裙内注气,并通过控制伺服电机调节风机流量及垫升压力.因此在每台垫升风机出口处布置了1 个风速传感器(图7(a))及1 个风压传感器(图7(b)),用以监测风机的出口流量及风压.在平台框架底板下面前后对称布置2 个风压传感器,测试气垫下的实时垫升风压.在横向钢梁上布置1 个轮辐式拉压传感器,以记录模型的航行阻力(图6).试验中各传感器的采样频率均为100 Hz.在气垫平台前进方向上布置了1 台高速摄像机,记录模型冰在气压作用下的破坏模式.在水池中布置了1 台跟随气垫平台模型运动的水下摄像机,用以记录围裙下方模型冰排的变形和破坏情况.在拖曳试验过程中,气垫平台的航速由主拖车控制,气垫平台底部在艏部破冰状态下的垫升压力及艉部垫升压力由风压传感器测得.

图6 平台模型拖曳方式Fig.6 Towing mode of the structure model
1.5 低温冻结模型冰
气垫平台破冰阻力模型试验,使用第4 代改进的尿素模型冰,即以尿素为模型冰溶液主要添加剂,经低温冻结制备得到.模型冰制备过程主要包括配置尿素水溶液、制冷降温、喷雾引晶、回温调节和参数检测等环节.
制备得到的低温冻结模型冰具有与天然海冰相似的晶体结构(图8),均由上部的粒状晶层和下部的柱状晶层组成.模型冰晶体结构和尺寸与天然海冰相似,从而保证模型冰表现出来的力学性质满足相似律要求.当回温调节模型冰力学性质达到预定目标时,在低温拖曳冰水池内进行单轴压缩试验和悬臂梁弯曲试验,测试冰强度满足要求,即开始模型试验.

图8 模型冰截面图Fig.8 Section picture of the model ice
1.6 试验流程与试验工况
完成低温冻结模型冰制备后,按以下步骤开展冰水池试验:
(1)气垫平台在平整地面进行垫升测试,通过调整风机转速将平台模型垫升至指定飞高,核定平台全垫升状态下的风机参数及气垫压力.
(2)将气垫平台转运至低温拖曳冰水池,启动伺服涡轮风机,调节转速至核定值,将气垫平台以全垫升状态拖入冰水池中的开敞水面,进行水上全垫升气垫压力的标定.
(3)按全垫升及非全垫升状态要求,在气垫平台模型上放置配重,调节结构吃水至预定位置.
(4)启动试验拖车,设计航速和距离拖曳气垫平台穿过模型冰排.拖曳开始前开启各传感器和摄像机,在试验过程中保持连续测试.
(5)停车后退一段距离,使结构模型与模型冰脱离接触,并重复步骤(3)∼(4)开展下一轮试验.
在试验工况的制定中,以气垫平台的垫升高度来控制全垫升与非全垫升状态,并测试不同航速下平台所受阻力,设计试验工况见表3.其中,全垫升状态的飞高参数对应原型平台的设计有效飞高,非全垫升状态的吃水参数完全遵照原型平台的设计吃水进行设置.

表3 模型试验工况Table 3 Model test conditions
2 试验现象
2.1 全垫升试验
当气垫平台在开敞水面全垫升时,平台下方的水面在围裙气囊喷出的高压气体作用下,形成了一个气垫凹陷,如图9 所示.可见气垫凹陷在水中形成明显边界,同时形成水面兴波向四周扩散.部分气体沿平台与水面的间隙向外散逸,裹挟大量水体形成飞溅水雾的现象,见图10(a).兴波的扩散过程造成风压的脉动变化,进而致使气垫平台发生持续的升沉运动.结构模型在试验拖车拖曳下由开敞水面行驶2 m 后,形成了稳定的航行姿态并到达模型冰排前缘.此时,由于平台底部存在水面凹陷,使得冰排前缘已经完全暴露于水面之上,并与围裙发生瞬态的撞击.这一瞬态的撞击事件,导致冰排前缘发生局部破坏,并伴随整体的下弯变形姿态,同时艏部围裙也发生小幅弯折变形,见图10(b).但这一过程并未促成冰排的大尺寸弯曲断裂.在全垫升状态下,气垫平台艏部围裙的底部与冰排边缘发生接触,围裙底部发生小幅弯折变形后顺势抬升,气垫平台以“前仰后倾”的姿态沿弯曲冰面顺利上爬至冰面上.当气垫平台完全上爬至冰面后,气垫平台以全垫升状态在冰面上保持低速航行,见图10(c).冰排则在风压作用下发生了可见的下陷变形,且形成冰面兴波,但试验全程并未发生破坏.

图9 试验工况1 水下试验现象Fig.9 Test phenomena under water in condition 1
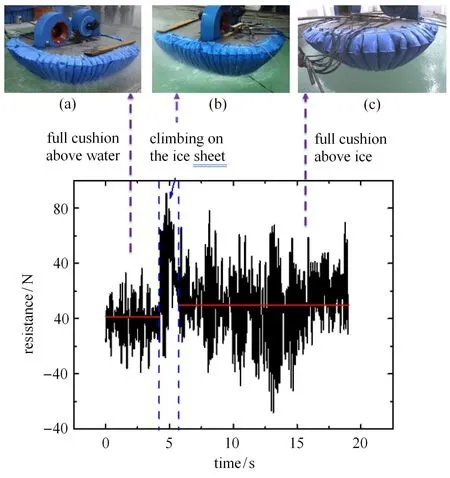
图10 试验工况1 现象和阻力时程Fig.10 Test phenomena and resistance curve in condition 1
全垫升工况中的气垫平台阻力时程同样在图10 中予以展示.由图10 可见,初始阶段气垫平台在开敞水面移动,此时航行阻力均值水平很低,并且由于风压的脉动效应和水面的兴波过程,致使阻力出现显著的波动现象.随后,围裙气囊与冰排的瞬态撞击和上爬过程,导致阻力水平突升,尤其是围裙底部在上爬过程中与冰排前缘的持续摩擦过程,致使这种大阻力过程持续了近1 s 的时间.随着气垫平台上爬至冰面,由水面全垫升状态转换为冰面全垫升状态,阻力快速回落.气垫平台在冰面上航行时,围裙底部会与冰面发生摩擦作用,受到的阻力水平明显大于在水面航行状态时,如阻力时程曲线中标注的均值红线所显示的.
在全垫升工况试验中还发现,尽管气垫平台模型拖曳装置中有两条弹性缆绳限制结构的平面内运动,但仍观察到气垫平台有显著的艏摇运动趋势.这是平台自身外形特点与平台两侧受力的不均匀性共同导致的.这一现象可能对原型气垫平台或驱动船只的操纵性造成十分不利的影响.
2.2 非全垫升试验
由全垫升试验的现象可知,有效的破冰过程是难以实现的.参考原型气垫平台的设计资料,采用其设计吃水条件进行非全垫升模式试验.将结构模型在开敞水域压载至设计吃水(27 cm),其他试验条件不变.
在敞水拖曳航行阶段,由于围裙气囊底部已浸没水中,所以高速气流不再以裹挟水颗粒的方式发生飞溅,而是在平台四周形成持续的气泡泄放,进而造成水面的持续翻滚,难以形成稳定的水面兴波情形.当模型艏部抵达冰排前缘时,围裙前端受到冰排全厚度的碰撞挤压,发生局部较大的弯折变形,阻碍了内部气道向下喷射高压气体,从而使得船艏底部暂时失去高压气体支撑,导致艏倾现象出现.同时,冰排也随之出现整体的下弯变形.更重要的是,此时冰排前缘的下方已经汇聚有一个明显的气腔,即便单从水上观测,也可以看到冰下一个巨大的白色空腔,如图11 所示.

图11 冰排底部空腔Fig.11 Airspace under ice
另一方面,由于此时平台具有一定的吃水,因此与冰排接触的不再仅仅是围裙气囊的下边缘,而是具有倒锥形下压构型的围裙气囊表面.这样一来,随着平台的继续向前推进,冰排的下弯变形持续发展,并很快在距离冰与围裙气囊表面的接触前缘大概5 倍冰厚的位置,出现了一条垂直于平台前进方向、平行于平台型宽方向的环向裂纹.这一环向裂纹快速向两侧扩展,当长度与前端接触区域宽度相当时,开始呈现向接触区域闭合发展的趋势,并最终抵达冰排前缘,致使冰排发生由单条环向裂纹贯穿的整体弯曲破坏.需要注意的是,环向裂纹的大范围扩展过程中,会不断有径向裂纹由接触区域向环向裂纹扩展,进而在抵达环向裂纹时将整体断裂的冰排前缘分割为一系列的碎块.而当平台的侧舷开始进入接触区域后,则会继续将已经初步断裂的冰排进一步压断,形成一条整齐的“割痕”.由此,随着平台的持续航行,就会在冰面上留下一条布满较小碎冰块的破冰航道,航道周围则散布着一系列大的环向裂纹痕迹,如图12 所示.

图12 航道及两侧冰况Fig.12 Ice conditions in the channel and on both sides of the channel
上述单条环向裂纹贯穿式扩展所引发的冰排整体破坏现象,在整个试验过程中并不是唯一的,还存在多条环状裂纹交错扩展的局部破坏模式.这种破坏模式发生在某次整体破坏现象之后,此时平台艏部围裙气囊与完好冰排的再次接触区就不再是规则的形状,由此导致围裙气囊与冰排的接触具有非同时特征,进而致使一系列距离接触较近的环向裂纹沿平台艏部先后出现,并在扩展过程中发生交错.这种交错的扩展就加剧了径向裂纹的产生与扩展,并将整个接触区域的冰排分割为一系列尺寸更小的碎块,如图13 所示.
图14 给出试验工况2 试验现象和阻力时程曲线,可以看出,局部破坏模式下的破冰阻力水平会明显比整体破坏下的阻力低.这种局部破坏模式会维持相当长一段时间,并在某一时刻又突然转变为整体破坏模式.冰排的整体破坏与局部破坏的交替出现也成为试验中重要的现象.观察图14 所示的阻力时程曲线还可以发现,不论是冰排的整体破坏还是局部破坏,都会促使破冰阻力随时间呈现出显著的加载--卸载周期性波动特征.
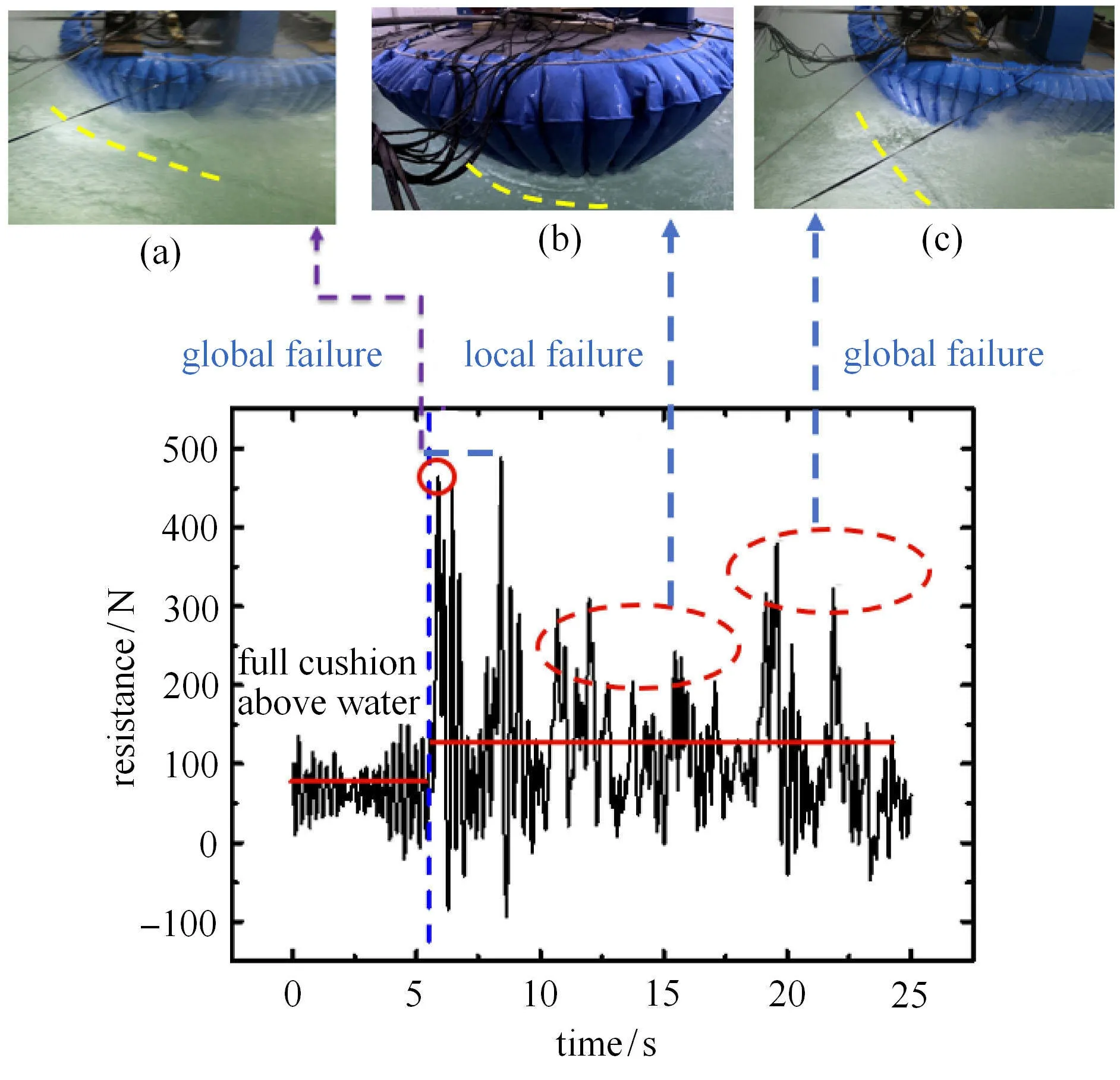
图14 试验工况2 试验现象和阻力时程曲线Fig.14 Test phenomena and resistance curve in condition 2
试验中另一种重要的现象是水下气腔的发展与释放.伴随着冰排的周期性破坏进程,由水下摄像可以发现冰下的气腔也存在周期性的发展与释放过程.图15 展示了一张从水下录像中截取的气腔景象,图15 中黄色虚线指示了气腔边缘位置.该景象对应于冰排发生一次整体弯曲破坏前的时刻,可以看到,此时水下的气腔是与平台下部的气垫空间相贯通的,所形成的外扩轮廓也恰恰与冰面上正在发展的环向裂纹相吻合.而当冰排的整体断裂事件发生时,则会在平台艏部围裙气囊前伴有高高喷射而出的水雾.在局部破坏事件发生时,这种水下气腔的压力释放过程,往往会将破碎的冰块顶起,形成一种冰排发生局部向上弯曲破坏的假象,如图16 所示.

图15 试验工况2水下试验现象Fig.15 Test phenomena under water in condition 2
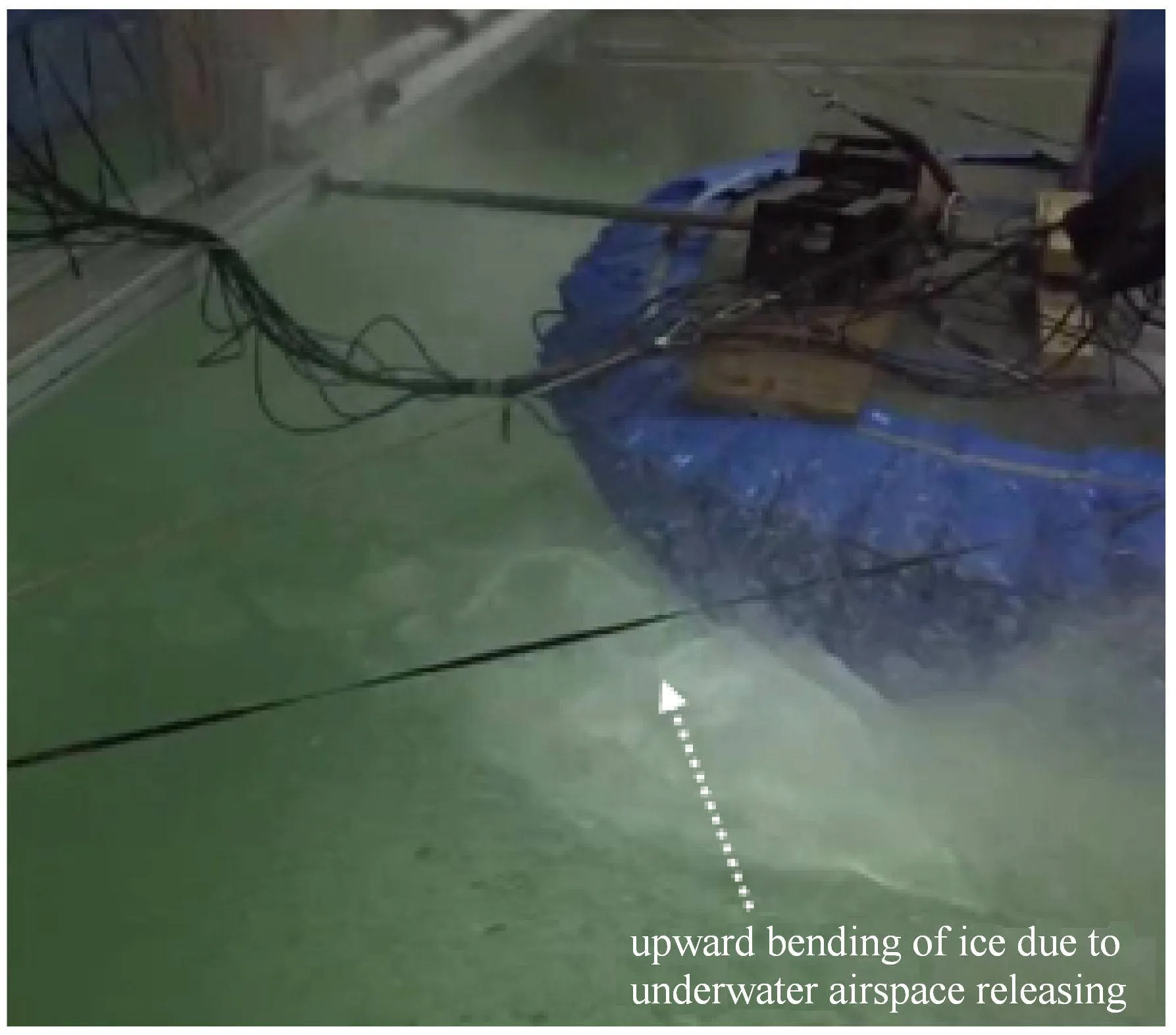
图16 冰排向上弯曲破坏Fig.16 Upward bending failure of ice sheet
在非全垫升工况试验中,仍然发现气垫平台出现了显著的艏摇运动趋势.在连续破冰过程中,冰排的非同时破坏导致气垫平台两侧受力不均匀,从而会对原型气垫平台的操纵性带来不利影响.
3 试验结果和分析
3.1 气垫平台破冰机理
由试验工况1 的现象可知,气垫平台在全垫升状态下运动至冰排边缘后,由平台底部形成的水面兴波,在向冰下水体传播的过程中,将发生快速的能量耗散,难以形成聚能效应,因此难以依靠冰下兴波促使冰排破坏.而对于兴波传播过程中带入冰下的有限空气,由于并未与气垫的高压空间形成连通,所以大部分很快被静水压推出冰下而发生散逸,一小部分则以小气泡的形成散布于冰体之下,难以形成有效的气腔环境.另一方面,由平台底部吹出的高压气流,因围裙气囊底部与冰排边缘之间存在缝隙而快速散逸,同样未能冲入冰下汇集成为稳定气腔,该过程如图17 所示.由此可见,由于全垫升状态下冰下难以形成稳定气腔,所以水体对于冰排的弹性体支撑作用仍旧维持,进而造成冰排的抗弯和垂向承载能力增强,并由此支撑平台最终上爬至冰面全垫升行进.
而当平台状态转为具有吃水的非全垫升状态时,围裙气囊的下部完全被水体封闭,因此,平台底部本身就存在一个具有压力维持能力的超大气腔.在敞水条件下,这一超大气腔不断由底部向周围的水体释放高压气流,并经由水气交界面得以释放压力.然而,当这些水下上升的高压气泡群遭遇水面冰排的阻碍后,就会快速汇聚为一定规模的气腔,并以体积扩展的方式释放压力.而平台底部的超大气腔则会随着平台与冰的作用发展,与冰下气腔形成连通,进而不断为冰下气腔的规模扩展和压力维持提供源源不断的输入,这也正是图15 中冰下气腔的形成机理.

图17 全垫升平台破冰失效原理图Fig.17 Sketch of ice breaking process by full-cushion platform
更重要的是,冰下气腔的形成并不仅仅是消除了水体对冰排的弹性支撑作用,而是在气垫压力的供应下,对冰排产生了超过上部冰体自重的上顶载荷作用,如图18 所示.这样一来,冰排的受力条件就转变为:上表面的前端承受平台围裙的局部下压作用Fs,这一局部下压力Fs与平台的倒锥形线型促使冰排发生向下的弯曲变形;下表面的冰下气腔范围内承受近乎均布的上顶压力作用Pair.随着气垫平台的推进,越来越多的平台重量将向冰排前缘转移,即Fs在不断增大;同时冰下气腔的边缘也不断向冰排远端扩展,而由于其内部的压力维持能力,即Pair变化很小,导致冰排承受的总的上顶载荷也不断增大.由此可推知,冰排内部就形成了一个沿厚度方向不断增强的剪切应力场,最大的剪切应力自然就出现在冰下气腔的边缘位置上.冰下气腔上顶压力在冰内形成剪应力场,加快了冰内环向裂纹的扩展进程,从而促使冰排发生向下的弯曲破坏.

图18 非全垫升平台有效破冰原理图Fig.18 Sketch of ice breaking process by non-full-cushion platform
图19 为平台破冰结束后的航道及两侧冰排破坏图,可以发现大规模环向破坏随平台行进呈逐渐扩大趋势.平台第一次大规模环向破坏事件如图19 中环向切面①所示,由①切面至④切面出现了斜向裂纹②和③,这是由平台局部环向破坏所引发的.破冰进程中最后两次大规模环向破坏事件如④和⑤切面所示.这就说明平台破冰进程中持续地向冰排底部输送气体,使得气腔域规模逐渐向航道两侧冰排延伸,如图20 所示.由此可见,冰排底部能否形成稳定气腔,是决定气垫平台能否有效破冰的诱因,而气腔域的规模决定着冰排破坏的规模.

图19 冰排大规模环向破坏Fig.19 Global failure of ice sheet
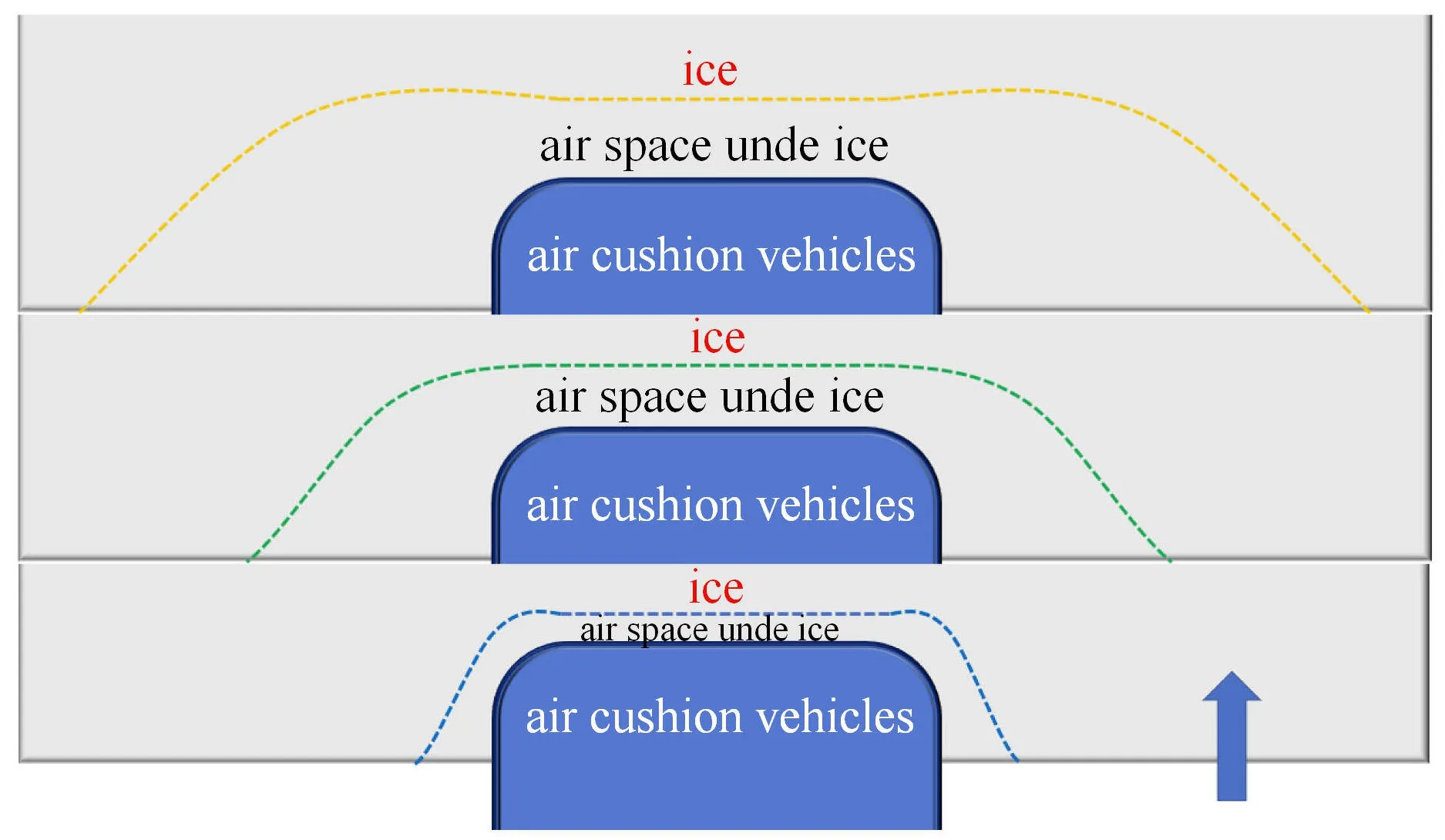
图20 平台行进中冰下气腔规模扩展Fig.20 Expansion of air space under ice during structure moving

图21 非全垫升工况风压曲线Fig.21 Wind pressure curves in non-full-cushion conditions
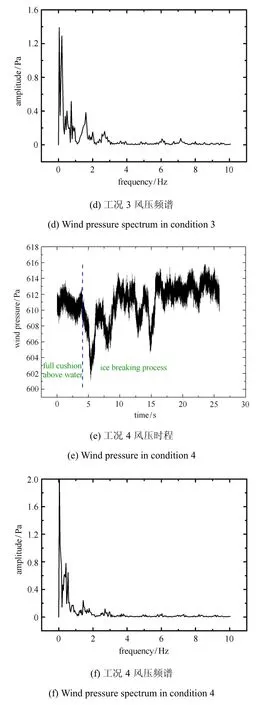
图21 非全垫升工况风压曲线(续)Fig.21 Wind pressure curves in non-full-cushion conditions(continued)
如前所述,平台破冰进程中的艏部破冰风压,由安装于平台艏部区域的风压传感器测量.图21 所示分别为非全垫升试验工况2,3,4 条件下,平台艏部破冰风压时程曲线和频谱.由试验现象可知,平台破冰进程中,由敞水航行转换为连续破冰航行后,艏部围裙与全厚度冰排相互挤压造成围裙大幅度非线性变形,平台整体也出现了明显的艏倾现象.如此,艏部前倾将气垫体积短时压缩,反映在风压时程曲线上则表现为风压值的瞬态跃升.待冰排被平台弯曲破坏后,平台航行姿态回调,且受惯性力的影响,平台艏部将超越敞水航行时的平衡姿态,形成短暂的上跃.此时,气垫体积快速增大,而气流在这一短暂的时刻不能快速填补增大后气垫空间,这就使得艏部破冰风压出现下降.如此,平台在破冰操作中经上爬与下沉姿态连续转换,艏部破冰风压则会因此表现出明显的周期性波动特征,且整体保持在一定波动范围内.同时,还可以发现,平台以不同航速进行破冰操作时,艏部破冰风压的波动幅值基本一致,波动频率基本相同.这说明航行速度对气垫压力的影响较小.
3.2 破冰阻力随航速的变化
在模型试验中,气垫平台的航行阻力通过模型拖曳装置中的轮辐式拉压力传感器测得.3 种非全垫升试验工况下测得的破冰阻力均值和最大值列于表4 中.
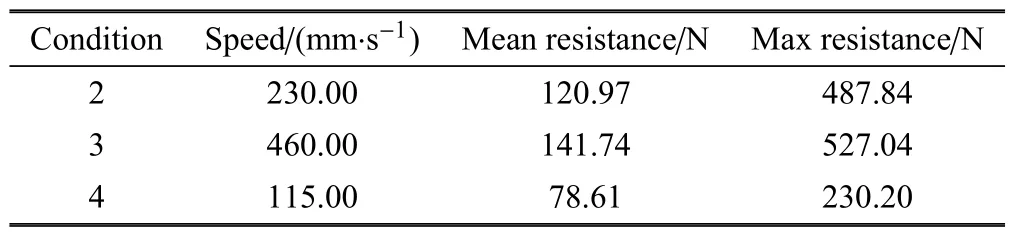
表4 不同工况下破冰阻力结果Table 4 Ice breaking resistance in each condition
在试验工况2∼4 中,分别测试了气垫平台在3 种航速下的破冰阻力.其中,根据相似律,试验工况2 对应原型结构的1 kn 航速,试验工况3 模拟原型结构的2 kn 航速,试验工况4 对应原型结构的0.5 kn 航速.取各组试验中气垫平台连续破冰阶段的阻力均值,作为衡量结构破冰阻力水平的度量参数,从而可用于设计气垫平台主机的平均功率.破冰阻力极值出现在冰排发生整体弯曲破坏过程中,与贯穿式单条环向裂纹同时出现.破冰阻力极值反映了破冰过程中结构可能遭遇的最大载荷,从而可用于设计气垫平台的瞬态过载能力.
不同航速下气垫平台的破冰阻力极值和阻力均值如图22 所示.
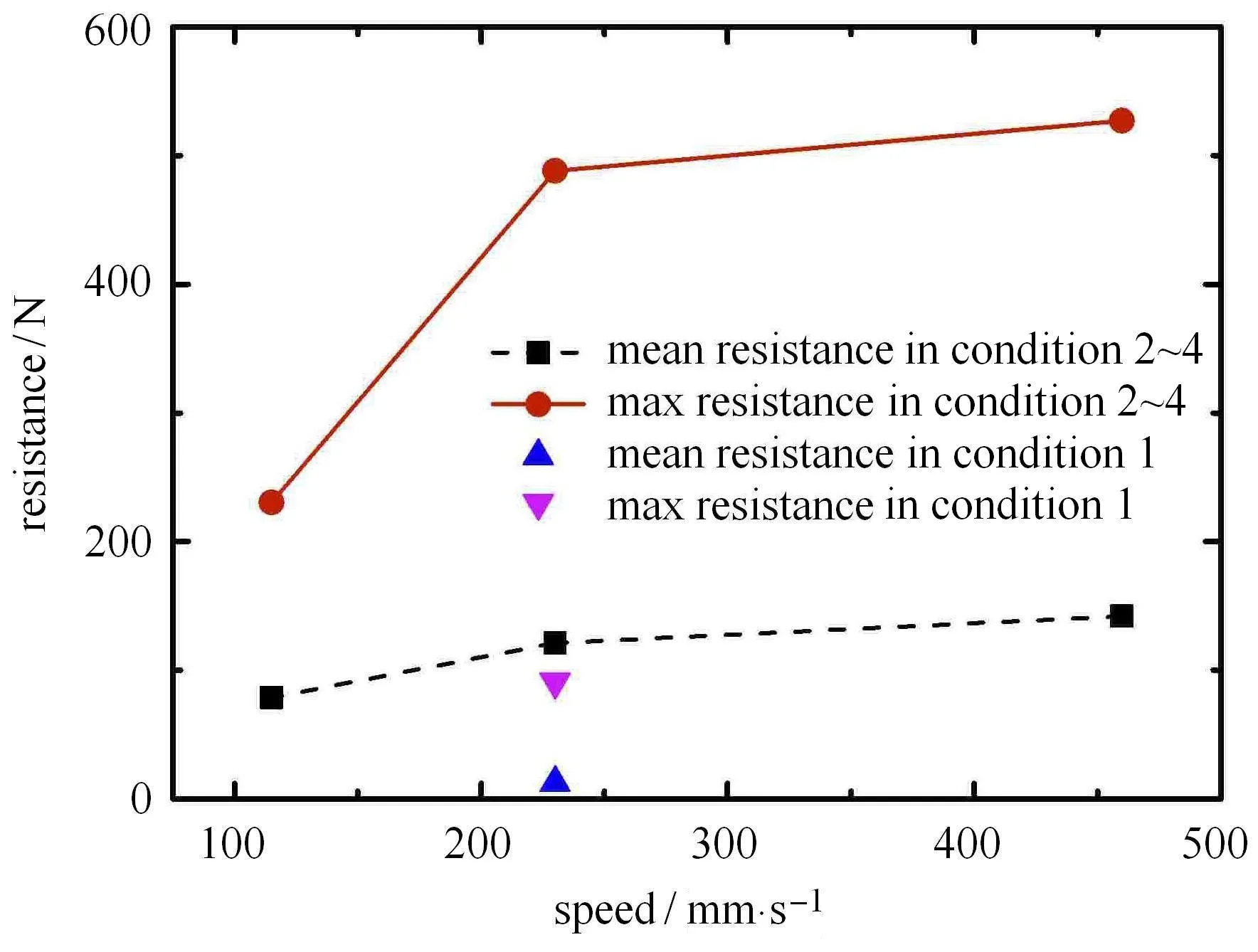
图22 破冰阻力随航速变化情况Fig.22 Changes of ice breaking resistance with speed
由图22 可见,气垫平台模型在设计吃水条件下的破冰阻力极值和均值随航速增加而增大.这是由于在设计吃水条件下,气垫平台的航行阻力由两部分组成,一部分是破冰过程受到的冰阻力,另一部分是水中航行受到的水阻力.水阻力随航速增加而增大,从而造成气垫平台的破冰阻力随航速增大.另一方面,随航速增加,气垫平台与冰排的接触过程更为迅速,围裙变形更大,导致结构承受的冰阻力水平也随之增大.由此可见,为减小破冰阻力,该型气垫平台在进行破冰作用时应设置较低的航速条件.需要注意的是,当航速由2 kn 增大至3 kn 时,破冰阻力极值和均值的增大幅度并不明显,可见阻力随航速增加而增大的速率有所减小.
图22 中两个三角符号数据点分别代表试验工况1 的航行阻力极值和阻力均值.在试验工况1 中,气垫平台处于全垫升状态,结构受到的阻力主要来自于冰面的摩擦作用.由图可见,在全垫升状态下,气垫平台冰面航行阻力均值(9.51 N)明显小于在设计吃水条件下进行破冰作业时的阻力.由试验现象分析可知,全垫升工况下的阻力极值是气垫平台围裙与冰排发生初始碰撞时产生的,这一过程常伴随有冰排的局部破坏.因此,试验工况1 的阻力极值较大,接近破冰工况2∼4 的阻力均值水平.但由于围裙与冰排接触面积较小,未引起冰排的整体破坏,试验工况1 的阻力极值远小于破冰工况2∼4 的阻力极值.
4 结论
本文开展了平整冰条件下的气垫平台低速破冰试验,分别测试了不同垫升状态和航行速度对结构破冰进程及破冰阻力的影响.通过试验得到以下主要结论:
(1)对于本文研究的破冰专用气垫平台,非全垫升状态更有利于冰排发生破坏,在破冰作业时应采用非全垫升模式.
(2)平台浸入水中后,底部高压气流扩散至冰排底部将水体排开,形成冰下气腔,且围裙底部可为冰下气腔的规模扩展和压力维持提供源源不断的气体输入.待平台与冰排相互作用后,失去水体弹性支撑的冰排在结构的下压作用下发生弯曲变形,在气腔上顶压力的作用下,气腔边缘位置冰排中出现环向裂纹,冰排发生弯曲破坏.发现平台破冰的关键机理,是可在冰排底部形成气腔.
(3)气垫平台的艏部破冰风压随航速变化较小,破冰阻力随航速增大而增大.
(4)气垫平台在破冰过程中会出现明显的艏摇运动趋势,这是气垫平台几何构型与冰力作用的不均匀性共同导致的.
综上,气垫平台在非全垫升状态下会受到很大的阻力作用.在此情况下,采用自航模式破冰难以配备能产生足够推力的风机,更无法有效控制平台的航行姿态.在实际应用中,可以考虑配备具有足够推进功率的船舶,驱动气垫平台进行破冰作业,并通过刚度较强的连接框架控制平台姿态,从而保证气垫平台能够安全、稳定的连续作业.
