用于辅助体育创新教学“VR+便携式机械臂”系统设计
2021-04-22杨双赫王琼惠徐笑然李欣谣
杨双赫 王琼惠 徐笑然 李欣谣 朱 娜
(沈阳理工大学机械工程学院,辽宁 沈阳 110159)
0前言
如今,虚拟现实被认为是多媒体最高级别的应用,能够为学生提供生动、逼真的学习环境,其技术已经成为促进教育发展的一种新型教育手段。然而在现代体育教育中虚拟现实技术不能够实现真正的教学使用,体育训练需要真实的力量感与触感,本团队设计研发的“VR+便携式机械臂”可以精确地定位到三维空间上的某一点进行作业,解决了体育教学中虚拟现实技术推广的难题。
1系统开发设计
“VR+便携式机械臂”作为一种新型的教学技术,在硬件设备方面,主要运用到VR头盔,便携式机械臂,kinet体感摄像头等辅助设备,使其能对教学场景进行模拟,提高课堂效率,达到更好的教学效果。
1.1硬件部分设计
由三星公司生产的Gear VR结合现在已经成熟的传输应用Home Theater,以及一个支持MIMO和802.11ac的高性能无线路由器,就可作为一个无线头戴VR显示器使用。通过它可以对学生运动时头、手等进行实时监控,并将数据实时反馈给仿真控制系统中。在本次系统设计中,便携式机械臂采用轻便材料,具备肩-肘-腕3个关节组合,由左右对称的机械臂与连接构件组成,共计8个自由度,具有可控自由度多、人机信息传输量大、实时性要求高的特点。微软公司生产的kinet体感摄像头通过结构光对学生运动进行捕捉跟踪,实现人机互动。
1.2软件部分设计
在Poser 5.0软件中,以H-Anim作为标准构建学生人体几何模型,采用齐次变换矩阵构建学生运动数学模型;运用Kinect动作捕捉原理采集运动数据,获取实时运动数据。通过结构光发射器和结构光接收器获取该场景中的深度图像。从深度图像中分离出人体轮廓,对其进行处理,把人体的各个部分相匹配,确定各个关节点在人体中的位置并存储为BVH格式,应用SIFT 算法与MongoDB数据库中的标准动作进行比对,从而达到对学生动作进行规范的目的,提高课堂效率。为了将学生的动作分析过程进行更加量化的对比,本文提出采用特征向量进行相似性匹配的原理。这种计算方法将空间三维动作的离散点进行欧拉计算简化,得到几个基本平面运动问题,以平面运动特点来分析动作的差异性。对于差异度的计算,以每个特征平面上的法向量和向量夹角来判断,前者决定动作的整体精确程度和规范性,后者决定局部规范程度。通过计算空间坐标的差异度,传送空间坐标移动指令到便携式机械臂系统,从而带动用户手臂进行调整运动。
1.3仿真部分设计开发
应用Matlab/Simulink进行VR仿真,根据人体各体段质量、质心位置对身高和体重的二元回归方程建立数学模型,求解方程模型,运用Matlab的解析功能计算出值解,利用仿真技术Simulink库中的图形建模方式模拟人体的运动轨迹,建立健美操动作系统的动态模型,通过MATLAB中的 Robotics Toolbox对机械臂进行建模仿真,采用标准D-H建模方法。建模的详细过程如下,首先使用标准D-H表中的参数输入到Link函数中,通过Link函数构建机械臂的连杆并将关节角度设置为可调整的模式,然后使用SerialLink函数将所有的连杆连接起来构建出初步机械臂模型。最后开启示教模式,定义出机器人的名称,构建初始的角度状态。使用plot3函数将轨迹经过的点按50Hz采样率输出到坐标空间,显示出机械臂末端所经过的路径。到此,可以使用不同数值的0i数值控制机械臂的关节转动角度,进而来控制机械臂的运动动作,相关的技术已经比较成熟。
2结论与感悟
综上所述,基于“VR+便携式机械臂”技术设计开发体育教学仿真系统,使训练者在虚拟的VR场景中训练学习,并且还能够在硬件装备的协助下,使训练者在真实的力量感与触感下与计算机的虚拟环境进行互动,能够大大提高体育课堂训练效率,发挥积极设计应用效益,可以在实践中推广应用该系统设计方案。
具体操作步骤为:①在VR模式中设计舞蹈动作、建立角色(学生)模型、生成舞蹈动画教程。②通过Kinect设备识别学生动作并传输至深度学习系统得到动作误差。③基于视觉学习的机械臂得到误差指令,计算移动角度、距离并作出调整。④通过Kinect设备识别学生调整动作并传输至VR系统完成动作规范。
通过这次做项目,项目组4个人都学会了很多知识。相信这次实验会对我们今后的学习、工作和生活产生很重要的影响,真诚地感谢学校给我们提供了这
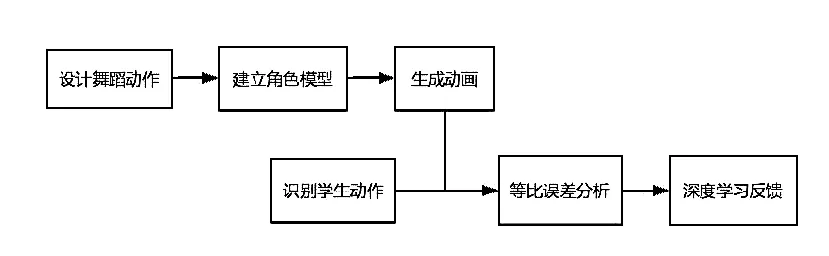
图1流程图
样一个锻炼我们的机会,感谢老师的指导和鼓励,感恩小组成员之间的支持和帮助,感谢同学们提出的宝贵意见。希望以后还能继续参加类似的科技创新活动,把大学生活过得更加充实。