柔性链驱动的手功能康复训练系统研究
2021-04-15肖艺璇李新伟喻洪流
肖艺璇, 李新伟,喻洪流
1.上海理工大学康复工程与技术研究所( 上海,200093)
2.上海康复器械工程技术研究中心(上海,200093)
3.民政部神经功能信息与康复工程重点实验室(上海,200093)
0 引言
随着社会的发展和人口老龄化的加剧,因中风或其他神经紊乱而导致肌肉损伤的人数也在增加。对于这些患者来说,通过康复来恢复日常活动的能力变得尤为重要[1-3]。其中,可穿戴设备是康复领域研究的关注重点[4],因为它们可以独立控制和训练使用者的关节运动。研究表明,手在日常生活活动(ADL) 中是必不可少的,许多与环境和日常物品的互动都是通过手进行的[5-7]。针对我国人口基数大,脑卒中发病率高、康复医师相对缺乏,训练效果受康复医师个人水平和经验影响,手功能康复训练治疗费用高等现状,研发一款可穿戴的手功能康复训练装置来帮助病患自主进行康复训练治疗至关重要。
现有手功能康复设备按照驱动部位可以分为指尖驱动、关节驱动、物体接触驱动等。哈佛大学Polygerinos 团队[8]研制出针对手功能抓握障碍个体的康复与生活辅助相结合的柔性手套,采用纤维增强材料的成型弹性腔组成的柔性体执行器,通过改变柔性体内腔压力带动手指完成抓握动作;岐阜大学Ueki 团队[9]研制的手部外骨骼康复机器人,具有全自由度,其中拇指4 个自由度,四指各有3 个自由度,腕部有2 个自由度,由6个独立电机驱动;香港理工大学研究团队[10]开发的可穿戴式希望之手,共有5 个自由度,每个手指都配有线性微型电机提供驱动力,采用EMG 控制手部训练和人机交互。
国内外现有手功能康复设备中一类是电机数量众多,结构复杂,穿戴性差;另一类个性化适应性差,无法满足不同手部特征患者的需求。因此本研究旨在设计出一种运动角度满足手指正常运动范围,可以针对不同手部特征参数的患者进行个性化调整的手功能康复训练装置。
1 机械结构设计
1.1 人手生物学特性阐述
掌指关节(MCP)、近侧指间关节(PIP)、远侧指间关节(DIP)[11]决定了人手四指相对于手掌运动。每个手指有4 个自由度, 其中MCP 有2 个自由度,PIP 和DIP 各有1 个自由度,拇指有3 个自由度, 整体共计19 个自由度。手指运动的特点包括:(1)手指关节弯曲伸展、内收外展均有一定角度范围;(2)各段手指骨在同一个平面内运动;(3)大拇指外伸的两段指骨在同一平面内运动;(4)PIP和DIP 有互相约束,即使无外力作用, PIP 弯曲,DIP 也会弯曲;反之亦然。正常成人手指活动范围如表1 所示。
1.2 结构设计
本训练装置机械系统由五组柔性链驱动模块、动力输出机构和手背贴合面板组成,如图1 所示。通过双出轴减速电机带动,实现手指柔性驱动模块固定托架与被动齿轮固定连接,托架围绕主轴的回转运动和与自转运动,从而使五指或者对应某特定需要训练的手指完成伸展和抓握训练,模块化的手指柔性驱动的结构设计可以快速实现左右手互换,适应不同病人的手指长短、手指间距。通过控制电机的正反转可以实现单个手指单独训练、特定某几个手指的联动训练。本设计属于可穿戴式训练装置,穿戴结构设定手指的远节指骨穿戴固定点。在训练过程中,通过牵引远节指骨带动中节指骨、近节指骨运动。本训练装置相比其他外骨骼类手指训练器机械结构简单,但更能满足手功能康复训练的运动范围要求。由于仅需固定手指末端的远节指骨和手臂,所以本装置方便穿戴,减轻了康复训练师和患者的负担。

表1 正常成年人除拇指外其余四指活动范围Tab.1 Range of motion of the other four fingers in normal adults except the thumb

图1 手功能康复训练装置三维模型Fig.1 Three-dimensional model of hand functional rehabilitation training device
动力输出机构中,由减速箱输出动力到第一级同步带轮;第二级同步带轮传动中,将主动轮与第一级同步带轮传动的外壳固定,被动轮的转轴在旋转外壳的带动下以中心距为半径围绕主动轮旋转。如图2 所示,第二级行星同步带传动机构,在旋转内壳上开有旋转限位槽,主动带轮通过限位槽用与第一级同步带传动机构的外壳形成固定连接,而不做旋转运动;旋转外壳和第一级同步带传动机构的被动轮主轴形成固定连接,在主动轴的带动下做旋转运动;根据相对运动关系,第二级从动带轮以该级同步带传动中心距为半径绕其主动带轮转动,并产生自转角速度,动力传递给一组齿轮来获得所需运动方向、速度和驱动力,放大手指柔性驱动模块固定托架的运动范围。
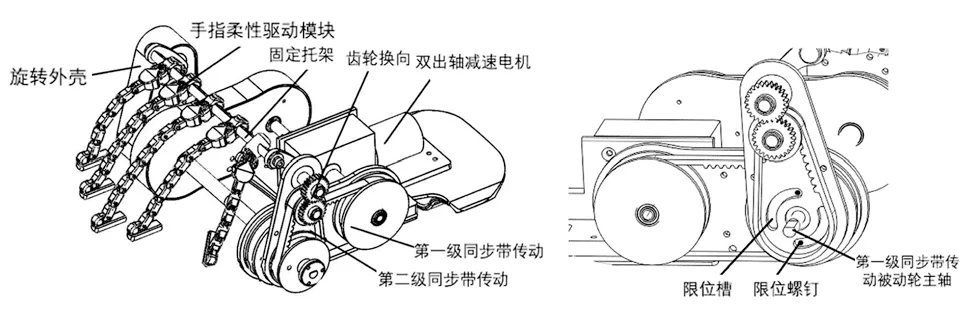
图2 动力输出结构Fig.2 Power output structure
手指柔性驱动模块为本训练装置的执行机构包括快速定位、方向微调、长度调节角度限位及远节指骨固定4 个机构,并由含有阵列式定位半球槽的柔性驱动模块固定托架将五个手指柔性驱动模块串联起来,使手指柔性驱动模块带动远节指骨运动,实现手指的伸展和抓握运动的康复训练。根据不同病人的手部情况可以快速实现左、右手互换,调整手指柔性驱动模块的长短和模块之间的距离。
如图3 所示,弹簧球头柱塞嵌入快速定位中,配合含有阵列式定位半球槽的自适应调节托架,可以实现模块的快速推拉和定位,拧开一端的螺母后,可以更换、调整手指柔性驱动模块的排列顺序和间隔距离。实际设计过程中,手指柔性驱动模块为了满足五指的不同情况,针对拇指和其他四指分别设计不同的快速定位,其中拇指的快速定位根据人的拇指运动方向做出具有仿形结构的空间角度调整;方向微调可以使柔性驱动模块自适应每个手指横向角度状态,提高舒适性;长度调节角度限位器可以调整每个手指柔性驱动模块的长度,又通过旋转限位来控制柔性链的弯曲极限,从而使手指柔性驱动模块在极限位置成为刚性链,使固定在远节指骨固定套的远节指骨获得足够推力和拉力。

图3 手指柔性驱动模块结构Fig.3 Structure of finger flexible drive module
1.3 动力学分析
本设计提出的手指驱动柔性链为若干带旋转限位的模块串联而成,如果多模块柔性链被带入动力学仿真,系统的无效自由度增多,冗余结构引起较多的无效数据计算,无法得到准确的分析结果;在动力学仿真过程中,本设计将模型简化,原手指柔性驱动链可以简化为轴向刚度大于手指刚度,且径向弯曲形变小于手指弯曲变形的柔性杆。由于机械臂杆长度较长且截面积相对较小,运动过程中产生的轴向变形和剪切变形相对于挠曲变形而言非常小,因而在动力学建模过程中可以忽略,将柔性杆简化为Euler-Bernoulli 连杆处理。本设计研究的柔性平面连杆,只考虑杆臂柔性,铰链处作为刚性材料处理,整体可以看作刚柔耦合动力学仿真模型。
本动力学分析以食指及其对应的柔性驱动链为代表,远端指间关节均可以由近节指骨带动做少量的被动训练,因而在模型设计过程中把远节指骨和中节指骨合并成一个连杆。而连杆由三个直杆,执行结构模型为:L1=60 mm,一个组合连杆(两端距离L2=150 mm),手指模型:L3=30 mm,L4=54 mm。如图4 所示为简化结构建模效果图。
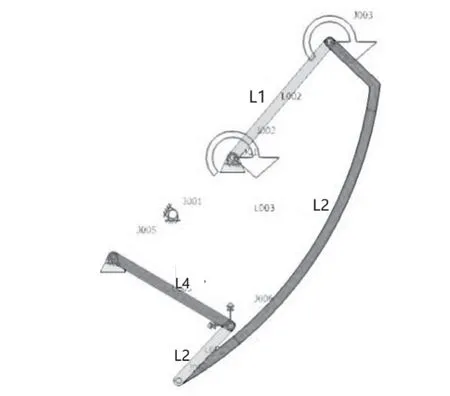
图4 简化结构建模效果图Fig.4 Simplified structure modeling renderings
对柔性杆进行有限元分析,定义材料属性,柔性机械臂的材料为碳纤维,密度=1.8×103kg/m3,弹性模量E=250 GPa,泊松比=0.3 划分离散网格,通过SOL 103 Flexible Body 结算方案进行模态计算,可以得到柔性杆形变状态和对应状态时间点的MCP、PIP 角度,柔性驱动模块固定托架动力学参数。解算后求得结果如图5 所示。

图5 动力学分析解算结果Fig.5 Results of dynamic analysis
以上仿真结果表明:手指被动训练关节运动角度、速度达到康复指标;根据仿真结果可以在合理阈值范围内选取速度、力矩更小的电机,减小整体结构的重量和功耗。
2 控制系统设计
柔性链驱动的手功能康复训练系统是康复机械结构本体和嵌入式控制系统的有机统一,整个手功能训练装置控制系统的集成如图6 所示。本设计的控制系统,由计算机系统、控制器模块、电机驱动模块、Leap Motion 虚拟现实图像采集模块4 个部分组成。穿戴式机械本体穿在患者的前臂部分,安装在本体上的力矩传感器和角度传感器用于采集DIP的运动信息,由数据采集模块AD7927 处理之后,通过SPI 通信发送给STM32F407 进行后续数据处理、分析;上位机通过Leap Motion 虚拟现实图像采集模块提供虚拟现实的游戏环境,来提高患者主动参与康复训练的积极性;电机驱动模块采用L298稳压H 桥电路换向,通过处理STM32F407 分配的PWM 信号对电机的转速、转向进行控制。
手部康复机器人系统还包括计算机提供的手功能康复治疗虚拟环境,通过Leap Motion 体感控制器采集偏瘫患者检测手部手势图像,经图像处理和比对既有的已经过深度学习的手势库,若手势匹配,则形成指令数据,根据数据控制虚拟环境的游戏对象,并由串口发送控制指令给STM32F407 控制本设计的手功能训练装置运动;若手势无法匹配,则提示训练网络再学习,更新手指控制指令库。利用虚拟现实技术将训练状态实时反馈给患者,虚拟场景和提示信息叠加到真实场景中的增强显示,提供一种轻松娱乐的康复治疗虚拟环境,包含视觉、听觉和触觉反馈。

图6 手功能训练装置控制系统结构Fig.6 Control system structure of hand functional training device
3 实验验证
为了评估系统的性能和实现最终的临床应用, 首先在上海两所医院康复科进行初步试用。分别选取5 名软瘫期肌张力大小不同的患者进行测试,在伸展和抓握被动训练过程中,关节角 度 范 围 为MCP(120°,192°),PIP(78°,190°),DIP(100°,195°),重复误差<5%,可以完全满足手功能障碍患者进行康复训练的角度和施力要求,且在安全范围内。
产生重复误差的主要原因是尼龙搭扣绑带松紧程度较难控制,因而在往复训练过程中手指各关节角度会产生一定误差,但不影响手部康复训练效果。如图7 为一个训练运动周期内手指各关节角度变化。
对比通过拟合实际关节角度变化曲线和动力学仿真结果曲线如图8 所示。在运动趋势和范围两个方面,可以发现除因手指长短引起的角度范围有±10° 浮动以外,实验数据和仿真结果相符。经过试用之后5 位软瘫期手功能运动障碍患者和康复医师均表示,本设计的康复训练系统可以在一定程度上替代康复医师完成部分手部抓握、伸展运动训练,且穿戴舒适,运行稳定。
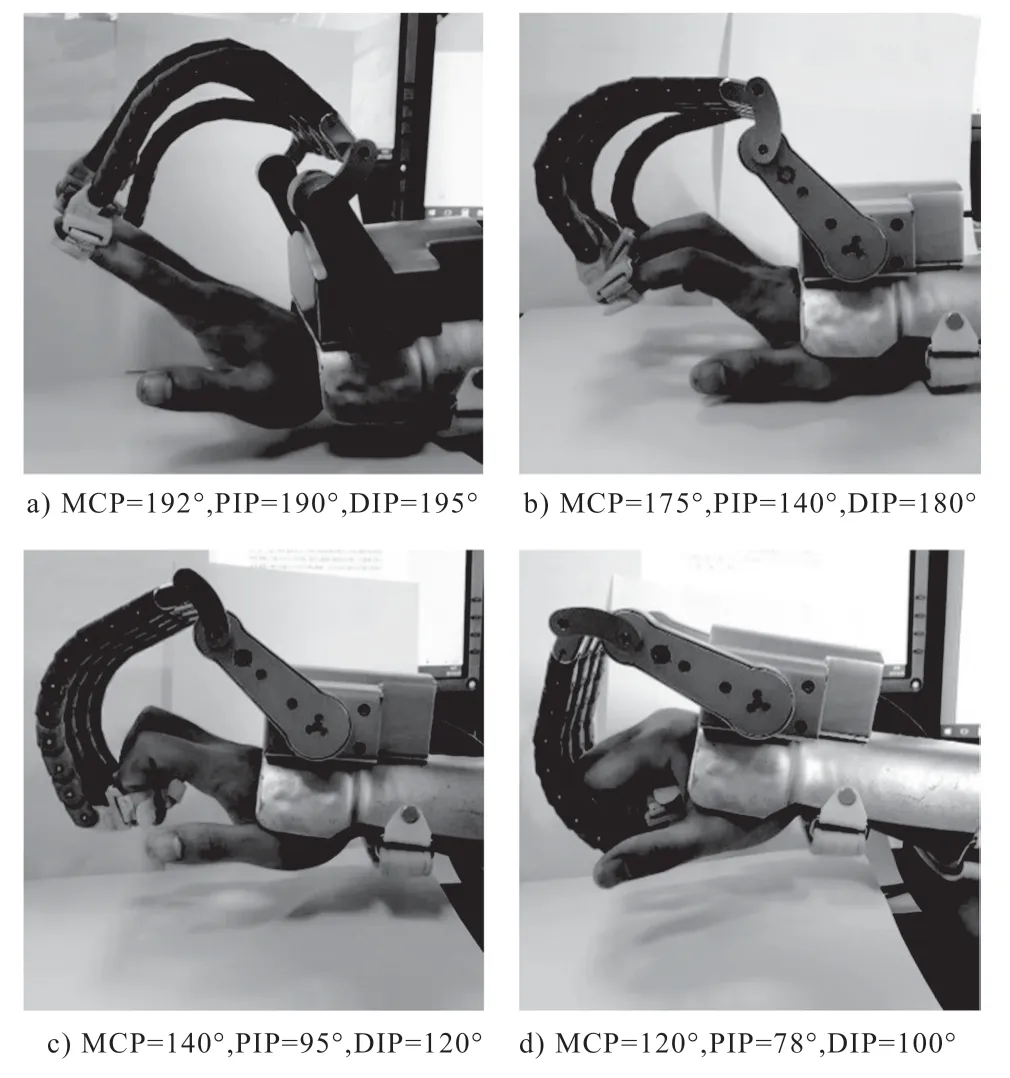
图7 一个训练运动周期内手指各关节角度变化Fig.7 Changes in the angle of each finger joint during a training exercise period
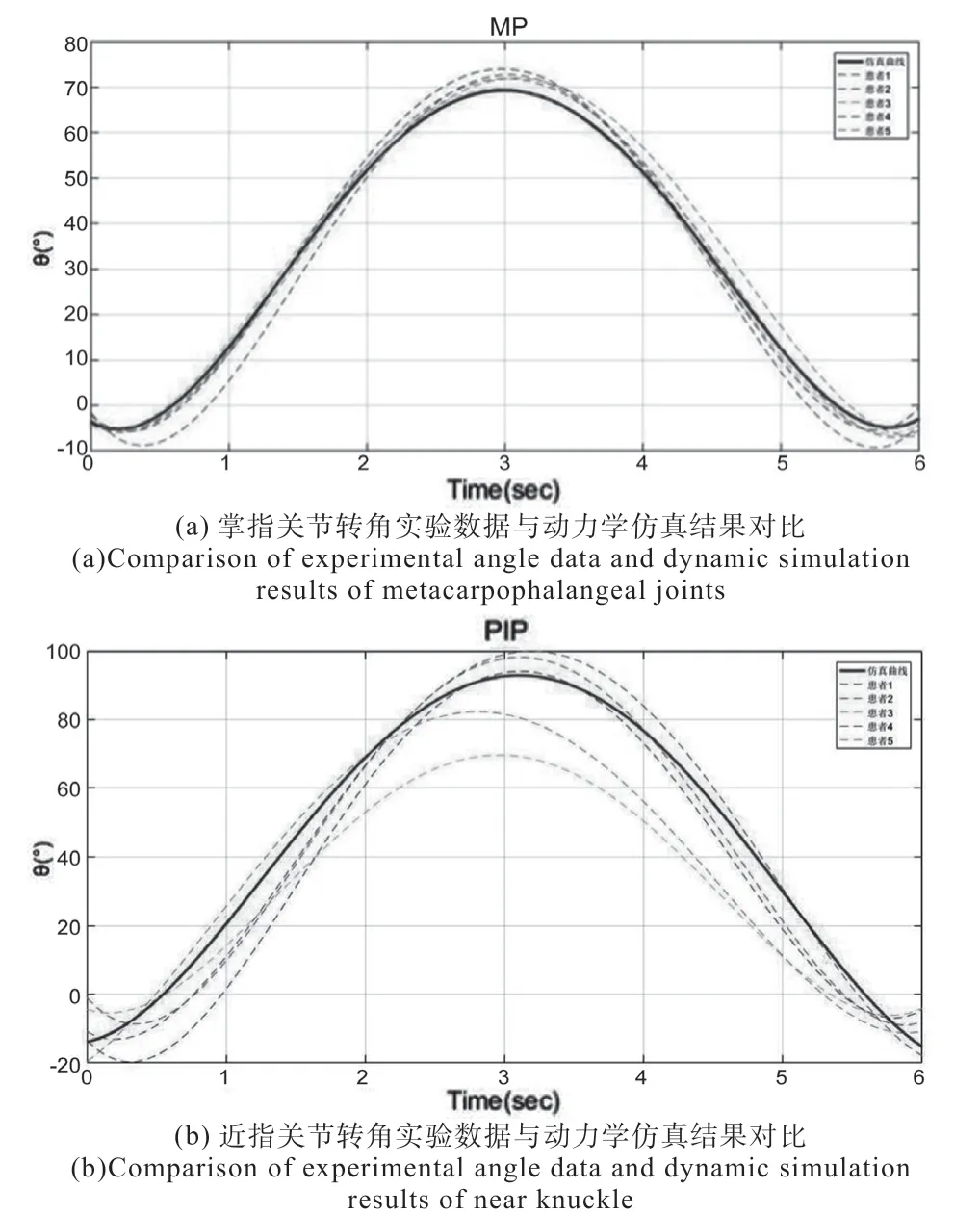
图8 5 位患者使用本系统后采集的关节角度数据与动力学仿真结果对比Fig.8 Comparison between the joint angle data and the dynamic simulation results collected from 5 patients after using the system
4 结论
研制的手部康复机器人机构能辅助病人完成手指的抓握和伸展运动功能训练任务。这种新型穿戴式手部康复机器人与现有的外骨骼手部康复机器人相比,结构轻便、穿卸方便,且柔顺性好、运行稳定,非常适合在社区和家庭中使用。更重要的是其具有左右手互换、指间间距可调等个性化适应的功能,克服了目前其它技术的手功能装置难以个性化适应的缺点。实验结果证明,通过人机交互和控制系统实现对手指各关节角度的控制,所设计手功能康复训练系统的可用性和有效性。