电力系统随机小扰动区间稳定性分析
2021-04-15朱志伟史慧革张振曹桂州
朱志伟,史慧革,张振,曹桂州
1.郑州大学 电气工程学院,河南 郑州 450001;2.国网河南省电力公司 南阳供电公司,河南 南阳 473000
0 引言
电力系统在运行过程中会不可避免地受到随机扰动的影响,风力发电等新能源并网过程中随机因素对电力系统稳定性和电能质量的影响不容忽略[1-2].此外,由于温度、湿度等环境因素的影响,以及电力系统元件制造工艺、信息采集准确度等条件的限制,系统参数往往无法准确获取[3],存在参数摄动问题.在这种情况下,对系统的不定参数取某个确定的值来分析系统的稳定性,无法得到符合实际的结论.在实际的电力系统中建立随机不确定动态模型,明确不定参数与随机因素及它们之间的关系尤为重要.
近些年,研究人员针对电力系统中小干扰稳定性的研究取得了一些成果.文献[3]建立了含异步风电机组的电力系统确定性模型,给出了系统的区间稳定定理,并对其稳定性进行了分析,但未考虑随机因素对系统性能的影响.文献[4-5]对风电并网电力系统小干扰依概率稳定性进行了分析,但未考虑系统中某些参数的不确定性,以及系统参数与小扰动之间的约束关系.文献[6-12]建立了电力系统随机小扰动下的模型,并对其小干扰稳定性进行了分析,但采用的p阶矩稳定性或均值稳定性、均方稳定性分析并不能突出随机因素的存在及对系统的影响,而且未考虑系统参数摄动问题,以及不定参数与随机扰动之间的关系.文献[13]建立了电力系统的随机模型,在稳定性分析中突出了随机因素的存在,但不能明确随机因素与参数之间的关系.以上研究未能建立基于系统不定参数的随机模型,在随机扰动下对系统的稳定性分析中,均未能表现随机因素与系统参数之间的约束关系.
鉴于此,本文拟在随机因素扰动及参数不确定情况下,建立含异步风电电力系统的随机不确定动态模型,结合随机微分理论[14-15]给出系统依概率稳定定理,明确随机因素与系统参数之间的约束关系,以期为系统稳定性分析与控制提供理论依据.
1 电力系统随机不确定动态模型的建立
不考虑风速等随机波动因素对异步风力发电机组的影响,风力发电机组的轴系模型[3]可以表示为
其中,ωt和ωr分别为风力机转速和发电机转速,θω为轴系扭曲角度,Tt和TJ分别为风力机和发电机的转动惯量,Tω、Tsh和Te分别为风力机输出机械转矩、轴系转矩和发电机电磁转矩.
在实际系统中,风速等随机波动会造成风力发电机输入机械功率的波动,此功率波动在短时间内围绕某一均值波动,把功率波动作为高斯随机扰动项,且把系统的阻尼系数作为不确定参数,建立新的系统模型.
风力机机械功率可以用随机微分方程表示为
①
其中,pm为风力机机械功率;W(t)为维纳过程;pm0为机械功率的初值,即确定性部分;Δpm(t)为由于随机扰动引起的功率波动部分;ϑ为随机扰动的扩散系数.
异步风机组的转子运动方程为
②
其中,pe为电磁功率,将式②代入式①得到异步风机转子运动随机微分方程为
由功率等于转矩与角速度的乘积可知,考虑随机扰动的电机轴系动态模型为
③

④
其中,K为轴的刚性系数,DI为阻尼系数.将式④代入式③,可得异步风机随机模型为
⑤
考虑系统中的参数摄动,即令ωt=ωt0+Δωt,ωr=ωr0+Δωr,其中Δωt,Δωr为参数摄动项,则系统⑤可以表示为
令s=-Δωr,则有
当风电机组处于某个稳定运行点时,即Tω=Kθw=Te0,由文献[3],可得
⑥
对式⑥在s0处作泰勒展开,可得
Te=Te0+(dTe/ds)s=s0Δs
令s=s0+Δs,则
⑦
其中
将式⑦表示为向量形式,即得电力系统随机不确定动态模型为
dX(t)=AX(t)dt+Udt+QdB(t)
⑧
其中

2 随机电力系统变参数稳定性分析
定理1 考虑系统⑧,矩阵A的特征值实部为负,且系统解初值有界,若满足
证明对于系统⑧,若矩阵A为负定矩阵,则系统是小干扰稳定的.
构造Lyapunov函数V=eλx1x2,其中λ是常量,对其关于x1,x2分别求一阶和二阶偏导,得Vx和Vxx[15]:
Vx=[λx2ex1x2,λx1ex1x2]
因为eλx1x2>0,那么当



即
-4ab2d2-4a2be2+ac2e2+bc2d2+4abcde-c3de≤0
综上,若要使LV≤0,需满足:
⑨
把a,b,c,d,e带入式⑨,整理可得:
2k4DI(2DI-k1λσ2)>[k2(DI-R)+k1DI]2
⑩




3 仿真结果与分析
本节将以具体算例对系统进行分析,取异步风电机组相关参数如下:Tt=10,TJ=2.5,DI∈(1.35,1.65),s0=0.08,计算得R=-7.23,额定电压0.69 kV,频率50 Hz,定子电抗0.125 pu,定子电阻0.003 pu,转子电阻0.004 pu,转子电抗0.05 pu,激励电抗2.5 pu.
在阻尼系数变化区间内,分别取4组不同的阻尼系数,则相应矩阵A的特征值的实部如表1所示.
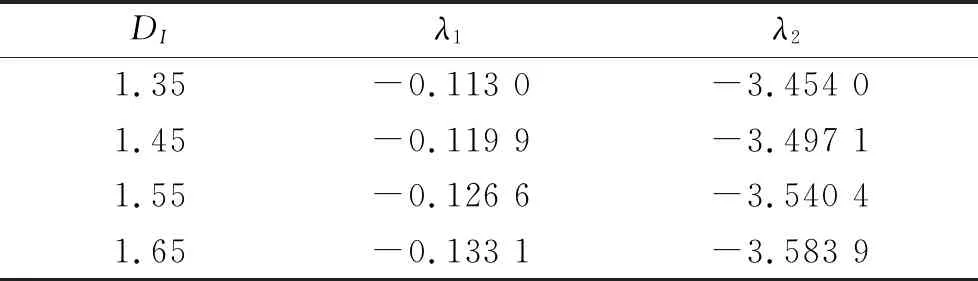
表1 不同阻尼系数对应矩阵A的特征值的实部
由表1可知,4组阻尼系数对应的系统矩阵A的特征值的实部均为负值,这是因为选取的阻尼系数包含了区间的端值,此时系统是小干扰稳定的;在随机高斯小扰动下,存在常量λ能够满足所述定理,则系统是依概率稳定的.
为了验证定理1的合理性与正确性,本文采用M算法[16]对系统进行Matlab仿真,本文共选取4组不同参数进行仿真.在高斯小扰动下选取两组参数:DI=1.45,σ=0.02;DI=1.55,σ=0.02,仿真结果如图1所示;在较大随机扰动下选取另外两组参数:DI=1.55,σ=0.5;DI=1.55,σ=1.0,仿真结果如图2所示.

图1 高斯小扰动下系统角速度变化量Fig.1 Angular velocity variation of the system under small Gaussian disturbance

图2 较大随机扰动下系统角速度变化量Fig.2 Angular velocity variation of the system under larger stochastic disturbance
由图1可以看出,在t=0时,由于受到高斯随机小扰动的影响,系统角速度变化量会有一个较明显的波动,但此波动幅值较小,均在0.02 rad/s范围内,且系统角速度变化量很快开始收敛;在大约t=20 s时,角速度的变化量趋于0,即能够平衡在零点处,系统稳定.
由图2可以看出,在随机扰动增大的情况下,系统角速度出现明显的变化,角速度变化量波动幅值较大,系统处于失稳边缘;当随机扰动强度继续增大时,系统角速度变化量较初值有15%的变化量,波动更明显,无法稳定在平衡点处,系统失稳.
综上所述,阻尼系数在给定范围内,系统是小干扰稳定的.在随机小扰动下,依据所述定理,系统是依概率稳定的,图1所示系统运行点几乎可以稳定在扰动前的稳态初值,即系统稳定;而在大扰动下,图2所示系统角速度变化更明显,系统运行点不能稳定在扰动前的稳态初值,即系统失稳.
4 结语
本文基于系统不定参数建立了系统的随机模型,并对电力系统在随机扰动下的稳定性进行了分析,给出了系统依概率稳定性定理,明确了保证系统稳定时的系统参数与随机激励之间的约束关系.仿真结果验证了所得理论的合理性与正确性.本文基于不定参数与随机扰动对系统进行建模与稳定性分析,能够更准确地描述实际系统的动态过程,所得结论方法更具实际价值,有望更好地应用于系统稳定性分析与控制.由于实际运行中系统的输入端也会受到外部不确定扰动的影响,下一步的研究将会在系统输入端加入随机扰动后再对系统稳定性进行分析.