基于自适应周期扰动观测器的变频压缩机转速波动抑制
2021-04-13孟凡琨文小琴游林儒
孟凡琨 文小琴 游林儒
(华南理工大学 自动化科学与工程学院,广东 广州 510640)
永磁同步电机具有结构简单、功率密度高、调速范围广等特点,在变频压缩机(制冷行业)中具有广泛的应用。变频压缩机的转子可以分为3种形式:往复式、旋转式(单转子和双转子)、涡旋式。单转子变频压缩机在能效、成本和性价比方面具有一定的优势,因而具有较大的市场份额。由于偏心曲轴和滑块将气缸分为左右容积,变频压缩机通过转子驱动偏心曲轴周期性地实现冷媒吸入、压缩和排出,近似周期的负载导致转速存在波动,且频率越低,转速波动越为明显。随着转速控制精度的提高,变频压缩机低频范围转速波动以及潜在的失步等问题突显出来。为了减小变频压缩机低频运行时的转速波动,国内外学者展开了广泛的研究并取得一定成果。当前,工程中普遍采用正弦波力矩补偿,该方法忽略周期性负载扰动的谐波分量,因而负载扰动未能得到有效补偿,低频时转速波动较为显著。黄辉等[1]采用负载转矩自动补偿器进行电流补偿,该方法忽略了高频转矩分量对转速波动的影响,同时,转矩自动补偿器中的低通滤波器将产生相位滞后,导致转速波动抑制性能有限。张国柱[2]通过在线傅里叶分析提取转速波动的基波成分,推算抑制转速波动的电流补偿量。然而,该方法忽略了转速的谐波成分,此外,电流补偿量的推算过程关系较为复杂,产生的相位滞后一定程度上降低转速环带宽。文献[3]采用比例谐振控制器(PR)抑制负载转矩扰动,通过离线傅里叶分析得知谐振频率为转子机械角频率的固定倍数,该方法的自适应性较差,当工况发生变化时,谐振频率的偏差将导致速度波动抑制效果变差。

重复控制通过构建适当的内模,可以有效地实现周期信号的抑制或跟踪[9]。由于其结构简单且易于实现等特点,重复控制器在永磁同步电机控制中得到了广泛的应用[10]。文献[11]采用低通滤波器提高重复控制器的鲁棒性,但高频段幅值波动和相位滞后较为显著,降低了扰动抑制性能。文献[12]采用相位超前环节对重复控制器引起的相位滞后进行补偿,不同的频段采用不同的相位补偿函数,使得相位具有一定的稳定裕度,但该方法较为繁琐。文献[13]采用基于拉格朗日(Lagrange)级数展开式对非整数延时进行逼近。与普通的重复控制相比,理论上,当采样频率一定时,基于Lagrange级数展开式的重复控制器可以抑制任意频率扰动,但因灵敏度与计算复杂度的相互影响,需综合考虑重复控制器的控制精度以及动态响应。
为了解决上述问题,本研究采用自适应周期扰动观测器(APDOB)实现周期性负载扰动观测,并对电流进行补偿,以减弱周期性负载扰动对变频压缩机转速的影响。本研究构建周期负载扰动观测器并对参数进行分析与设计;然后构建自适应陷波器估计周期扰动基波频率;最后通过仿真和实验验证了所提方法的可行性与有效性。
1 变频压缩机模型
为了简化变频压缩机的动力学模型,假设:①忽略铁心饱和;②不计涡流及磁滞损耗;③三相电流产生的磁通以及转子磁通呈正弦分布。在同步旋转坐标系下,其运动方程为:
(1)
其中,id和iq分别为坐标系下定子电流分量,Ld和Lq分别为dq坐标系下的定子电感分量,Te为电磁转矩,Td为负载转矩,J为压缩机等效转动惯量,B为粘滞阻尼系数,ωm为转子机械转速,Bωm项通常可以忽略不计,Np为极对数,Ψm为转子永磁体磁链。


图1 变频压缩机DOB结构框图
图2示出了变频压缩机负载转矩波形(一个机械周期)[1]。可以看出,负载转矩波形随着工况的不同而变化,且负载转矩幅值和相位存在着较为明显的差异。因此,如何构建自适应扰动观测器,成为解决转速波动问题的关键。
系统控制目标要求降低变频压缩机低频范围的转速波动,使得转速偏差尽可能地小。为此,做以下假设:

图2 不同工况下负载转矩曲线
(1)在相同的工况下,负载转矩扰动具有近似的周期性和重复性。
(2)测量噪声主要存在于高频范围内,低通滤波器可以有效地抑制测量噪声。
(3)在相同的工况下,转子转速具有相似的周期性和重复性。
假设负载扰动d(t)满足如下微分方程,即

(2)

(3)
式中,s为拉普拉斯算子,d(0,s)为扰动信号d(t)的初始状态,由各阶状态初始值决定。假设负载扰动d(t)为周期信号,则其离散形式可表示为
d(k)=d(k-N)+f(k)
(4)
其中,
(5)
d0(k)和N分别为扰动信号d(t)的初始状态和周期延时,k为采样序列。由z变换可得
(6)
1.1 普通的扰动观测器分析
图3为普通扰动观测器结构框图。其中,r、y、d、n、、P、Pn、e、u和δ分别为控制系统输入、输出、等效扰动、测量噪声、扰动观测值、对象实际模型、对象标称模型、跟踪误差、补偿后控制量以及模型误差。C(z-1)为系统固有的控制器,如比例积分微分控制(PID)或H无穷控制(H∞),用于实现伺服或鲁棒特性;Q(z-1)为待设计的滤波器;m为Pn的相对阶次。假设模型偏差由乘性偏差构成,即

图3 普通DOB结构框图
P(z-1)=(1+δ(z-1))Pn(z-1)
(7)
如图3所示,为了简便,省略离散域延迟因子z-1,可得控制系统的灵敏度函数:
(8)
图4为基于小增益定理的扰动观测器结构框图,当满足小增益定理时,控制系统鲁棒稳定。

图4 基于小增益定理的DOB结构框图
1.2 Q滤波器参数设计
假设扰动为周期信号且满足相应的内模,由内模原理可知,如果灵敏度函数S(z-1)包含内模1-z-N,则扰动d至误差e的传递函数Ged=S(z-1)P(z-1)将渐进趋近于零。令
1-Q(z-1)z-m=1-z-N
(9)
当Q(z-1)采用有限脉冲响应(FIR)滤波器时,即Q(z-1)=z-(N-m)。为增强滤波器的鲁棒性,本研究采用无限脉冲响应(IIR)滤波器[10],即
Q(z-1)=BQ/AQ,令:AQ=1-αNz-N,则BQ=(1-αN)z-N+m,即
(10)


图5 Q滤波器关于q(ejωTs)的增益
1.2.1 扰动信号周期N的设计
(11)
证明过程如下[15]:定义周期扰动d(t)的延时N为
(12)
其中,σ为非整数且0<σ<1。由于扰动信号的基波频频ω0满足式(9),因此,将N值带入可得
(13)
由于0<α<1,通常N取较大值,存在αN≈0。则通过级数展开可得
1.2.2 参数α的设计
参数α为IIR滤波器零点与极点的比值且α∈[0,1]。由式(10)可知,当α=0时,Q(z-1)为FIR滤波器,即Q(z-1)=z-N+m;当α=1时,则完全阻断了周期扰动补偿。为了简化分析,令q(z-1)=1,1-Q(z-1)z-m和Q(z-1)z-m关于α的幅值曲线如图6所示。相关参数分别为ω0=500 rad/s,Ts=0.1 ms和m=1。可以看出,随着α的增加,1-Q(z-1)z-m幅值呈现梳状结构;在特定频率(如:500、1 000、1 500 rad/s等)下,Q(z-1)z-m幅值保持不变,其余频率范围幅值具有较为显著的衰减。因此,Q(z-1)z-m能够较好地滤除周期成分。特别地,当α=0时,Q(z-1)z-m幅值恒等于1,此时,扰动d的周期成分以及非周期成分直接用于反馈补偿,同时,1-Q(z-1)z-m的最大值‖1-Q(z-1)z-m‖∞=2,也就是说,相应频率扰动幅值增益将放大100%。

图6 α与Q滤波器
1.2.3 截止频率ωc设计
截止频率ωc的设计综合考虑扰动抑制性能以及鲁棒稳定性[16]。为了简化分析,忽略z-m对截止频率的影响。首先,假定扰动信号基波频率为ω0时,则Q滤波器增益为
令к=ω0/ωc,可得Q滤波器幅值与к的关系曲线,如图7所示。可以看出,对于给定的基波频率ω0,截止频率ωc的下限由增益曲线的上限决定。

图7 κ与Q滤波器增益
基于以上设计,截止频率ωc的上限由PDOB鲁棒稳定性得出。由图4小增益定理等效模型[10]可知,如果δ(z-1)稳定且满足H∞范数有界,且

(14)
则控制系统鲁棒稳定。其中,
(15)
2 自适应周期扰动观测器
2.1 扰动基波频率估计
当周期扰动基波频率发生变化时,扰动抑制性能也随之发生改变[17- 18]。因此,基波频率估计为自适应周期扰动观测器的核心部分,本研究采用基于Steiglitz-McBride(S-M)方法的自适应陷波器(ANF)实现扰动基波频率估计。图8为自适应周期扰动观测器的结构框图,其中,A(z-1)=1+αz-1+z-2(α=-2cos (ωTs)),ρ为陷波参数。基于S-M方法的自适应陷波器频率估计算法如下所示[19- 20]。
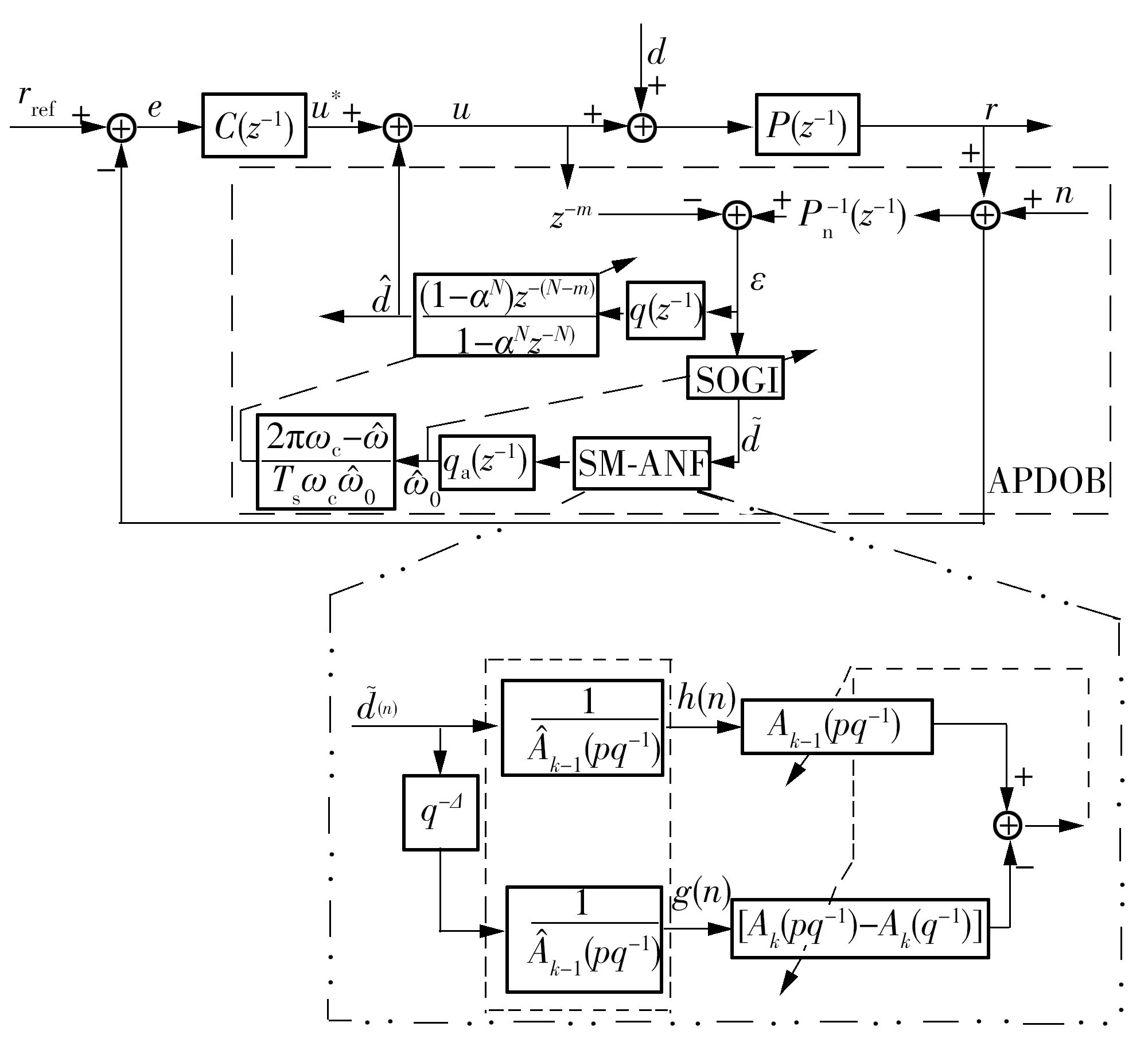
图8 APDOB结构框图

ρ=0.8,ρr=0.99,ρ∞=0.995,

主循环:
ψ(n)=-ρg(n-Δ)+(ρ-1)h(n),
e(n)=g(n-Δ+1)+ρ2g(n-1-Δ)-
频率估计值:

2.2 相关参数设计
延迟参数Δ,带通滤波器带宽bp和低通滤波器截止频率影响基波频率ga估计。为了优化相关参数设计,选择频率参考值为
(16)

图9 Δ与频率估计

(17)


图10 bp与BPF增益
低通滤波器qa(e-jωTs)=ga/(jω+ga),ga为截止频率,用于平滑参数估计,防止暂态超调或失调。如图11所示,当ga=50时,初始时刻频率估计存在较大暂态超调;当ga=10时,暂态超调得到有效的抑制。因此,适当的截止频率可以抑制频率估计过程中的暂态超调或失调。
3 仿真和实验
3.1 仿真
上述所提自适应周期扰动观测器的核心为扰动信号基波频率估计。为了验证该算法的可行性,基于Matlab/Simulink搭建普通DOB和APDOB数值仿真模型,相关参数如表1所示。

图11 ga与频率估计

表1 仿真参数
仿真模型如式(18)所示,其中,D(z-1)为伪微分算子,周期扰动dp由基波信号与相应的谐波构成。
(18)
其中,基波频率参考值为:
(19)
图12为APDOB基波频率估计曲线。其中,初始频率设定为 2 Hz。可以看出,初始时刻频率保持恒定,原因在于中心频率偏差使得BPF无法有效滤除正弦信号,依然选择2 Hz为频率估计值。当频率发生突变时,基于S-M方法的自适应陷波器可以在5 s之内实现频率准确估计(偏差小于0.1 Hz),同时,暂态过程平稳且无明显的超调。因此,基于S-M方法的自适应陷波器频率估计可以确保周期扰动的抑制性能。

图12 APDOB基波频率估计
图13为指令信号跟踪误差曲线。其中,指令信号给定值为 0,用于直观地体现周期扰动抑制性能。可以看出,当基波频率变化前,有限的灵敏度增益使得DOB具有较大的跟踪误差,当基波频率变化后,由于具有良好的频率自适应功能和较高的灵敏度增益,APDOB能够减弱周期扰动对跟踪信号的影响;然而,对于普通DOB,截止频率范围之内的所有谐波分量用于扰动补偿,跟踪误差幅值减小且形状与频率变化之前保持一致。

图13 指令信号跟踪误差
3.2 实验
为了验证所提算法的有效性,搭建变频压缩机实验平台,并与比例积分控制(PI)(无电流补偿)和 DOB 进行对比分析,其控制系统框图如图14所示。其中,采用 DSP TMS320F28069 作为主控制器,滑模观测器(SMO)用于实现角度和转速估计,载波和采样频率设定为10 kHz,实验参数如表2所示。相关数据经USB-CAN转换器发送至LABVIEW上位机并进行数据处理。当变频压缩机运行于15 Hz时,其q轴电流波形如图15(a)-15(c)所示。可以看出,当采用 PI 控制器时(无电流补偿),近似周期性的负载扰动使得q轴电流呈现周期性且幅值波动较为明显,进而导致SMO产生一定的周期性偏差。当采用普通 DOB 时,q轴电流得到一定程度的补偿,原因在于:①普通 DOB 可以有效抑制高频扰动信号(高于截止频率),主要包括功率模块的非线性压降导致的高次谐波和电流AD采样噪声等;②有限的灵敏度增益无法较好地抑制周期性扰动(低于截止频率);③减小 DOB截止频率能够增加灵敏度增益,而相应的相位滞后将影响周期扰动抑制性能;当采用APDOB时,除了非周期成分之外,q轴电流得到有效的补偿。图15(d)-15(f)示出了20 Hz时q轴电流波形(近似相同的工况下)。可以看出:当采用PI控制器时(无电流补偿),周期性扰动导致q轴电流产生较为明显的波动,且形状与15 Hz保持一致;当采用APDOB时,除了一些非周期成分,q轴电流得到有效的补偿。

图14 变频压缩机控制框图

表2 实验参数
图16(a)-16(c)为变频压缩机15 Hz时相应的转速曲线。当采用PI控制器时(无电流补偿),转速波动呈现周期性且具有明显的偏差;当采用普通 DOB时,有限的灵敏度增益使得转速呈现较小的周期性偏差;当采用APDOB时,周期性扰动得到有效的抑制,转速平稳且具有较小的偏差。为了直观体现转速波动抑制性能,采用均方根误差(RMSE)作为转速波动率的评价指标,即

图15 15 Hz和20 Hz q轴电流波形
(20)
其中:ωref为参考转速;M=Npfspd/f,为采样次数;f为运行频率;fspd=1 kHz,为速度环采样频率。当变频压缩机运行于15 Hz时,参考转速为300 r/min,当采用PI控制器(无电流补偿)、普通DOB和APDOB时,相应的转速波动率分别为5.8%、1.5%和0.6%;当运行于20 Hz时,参考转速为400 r/min,转速波动率分别为4.5%、1.3%和0.4%。可以看出,与普通的DOB相比,较高的灵敏度增益以及频率自适应使得APDOB能够有效地减小周期性扰动导致的转速偏差。此外,在近似相同的工况下,转速波动率随着频率的降低而升高,而相对较高的参考转速使得转速波动率降低。因此,转速波动抑制主要适用于低频范围。

图16 15 Hz和20 Hz 转速波形
4 结语
针对变频压缩机普遍存在的低频转速波动问题,本研究通过构建自适应周期扰动观测器实现扰动估计与电流补偿。首先,构建周期扰动观测器并进行相关参数分析;其次,采用基于S-M方法的自适应陷波器估计扰动基波频率;最后,在变频压缩机实验平台进行分析验证,分别运行于15 Hz和20 Hz。结果表明:与普通DOB相比,APDOB能够有效地抑制变频压缩机低频范围的转速波动。因此,该方法为变频压缩机实现低速高效运行提供一个有效的途径,具有节能降耗的实际意义。
