倾斜摄影测量技术在矿山土石方量计算中的应用
——以皖北某露天矿山生态修复项目为例
2021-04-12戴洪宝许继影
戴洪宝,许继影
(1.宿州学院 环境与测绘工程学院,安徽 宿州 234000;2.宿州学院 资源与土木工程学院,安徽 宿州 234000)
0 前 言
在露天矿山修复的整个工程量中,土石方量的计算是工程的一个核心环节,传统的计算方法主要是块段估算法,块段估算法作为传统的计算方法,数十年来在露天矿山修复土石方量计算中发挥了重大作用。由于露天矿山的几何形状具有相当复杂性,这种估算方法已经很难满足露天矿山土石方量精度上的要求[1]。“无人机倾斜摄影测量+三维建模”在国内应用已有近5年,但是在露天矿山修复土石方量计算中,多数项目是由地矿设计院主导,他们对于土石方量的计算还是采用传统的块段估算法进行,无论在外业数据采集或在内业数据处理上都是处于滞后阶段。
鉴于此,本文以皖北某露天矿山生态修复项目为研究对象,以无人机倾斜摄影测量技术进行外业数据采集,并且对研究区概况、航摄准备、像控点、航测等方面进行了分析研究。在外业数据基础上,对三维模型的构建进行了详尽的描述,通过三维模型提取点云数据,制作出地形图,结合方格网法土方运算原理计算出相应土石方量;最后结合设计资料对成果进行分析,得出相应结论。本文提出的工作模式对于推进新技术的发展、推广,对露天矿山生态修复工作具有一定程度的参考意义,应用前景广泛[2]。
1 技术路线
本文利用无人机倾斜摄影测量系统获取研究区域影像,采用倾斜摄影测量技术建立三维模型,利用方格网法进行土石方量运算,得到精确的数据结果。研究技术路线如图1所示。

图1 研究技术路线
2 外业数据采集
2.1 研究区概况
研究区矿山位于安徽省北部龙脊山某4处露天矿山,均为建筑石料用灰岩矿废弃矿山,治理面积为515 738.6 m2,其中矿山开采破坏面积约425 671.9 m2,原始山体未破坏面积90 066.7 m2,治理区多处存在危岩体,岩壁坡顶岩石破碎,有危岩分布,因矿山开采时局部边坡顺岩层倾向开采,存在崩塌及滑坡的地质灾害。研究内容为核查矿山地质环境修复治理工程中动用的土石方挖方量及未清运的矿石量。
2.2 航摄准备
1)制定详细的飞行计划。研究区矿山由于受开采工艺和自然条件的影响,均含有高陡边坡,最大坡度达80°左右,治理区平台面与坡顶落差最大达140 m,最小处近90 m,为解决这类问题,研究采用分层分块设计航线[3]。
2)选择飞行场地。为获取较好的影像,结合上一步的分块设计航线,研究区选择在每个分块区域的中心作为飞行场地。
3)查看天气,风速,风向。矿山相对高程较高,风速强且变化频繁,风向多变,故相较村庄居民点航测难度系数高,要求外业航测针对现场天气、风速、风向等情况做好应对调整[4]。
2.3 像控点测量
控点布设整体遵循“四周点组布设,加少量内部控制点”的布设原则,每平方公里大约布设3~5个像控点,考虑到矿山高低起伏,治理平台较多等特点,在共计0.51 km2的研究区内布设84个像控点,使研究区控制网更加稳固,满足研究精度要求[5]。
2.4 航空摄影测量
通过现场实地踏勘,了解研究区周围的布局和高度落差,以Google影像为底图,按照以下步骤生成航线:①测区绘制;②飞行参数输入;③产生航点数据。然后将规划的航线上传至无人机飞控系统,进行航飞完成研究区数据采集。设计航高为90 m,布设12条航线,航向和旁向重叠度均为80%,水平飞行速度6 m·s-1,前后左右正射5个相机共获得805张影像,影像尺寸为5 472像素×3 678像素,倾斜影像平均地面分辨率为2.08 cm。
3 内业数据处理
3.1 数据预处理
由于相机在飞行器起飞前已经处于工作状态,飞控获得的定位定姿(POS)数据数量会少于影像数量,因此需要根据规划的航线对飞控数据进行整理。另一方面,受偏向风干扰,会存在影像重叠率不规则、影像畸变差较大、影像对比度不相同等现象,需要对影像的数量、清晰度、色彩反差、色调和层次的丰富性进行检查[6]。
3.2 研究区三维模型构建
在数据预处理的基础上,对无人机获取的倾斜影像利用SIFT算法进行特征提取,按照式(1)进行光束法联合空三测量,得到经过优化的高精度外方位元素和消除畸变后的影像,用于后续露天矿三维模型创建和纹理提取[7]。
(1)
(1)式中Δ表示影像外方位元素的改正数,C为其对应的系数矩阵,ΔG和ΔT分别表示控制点和连接点坐标改正数,KG和KT分别为控制点和连接点改正数所对应的系数矩阵,L表示像点观测值与计算结果之差,Ld和LG分别为虚拟观测向量,I为单位矩阵,P1、Pd、PG分别表示像点观测方程、外方位元素虚拟观测方程以及控制条件方程所对应的权阵。
通过多基元、多视密集影像匹配进行立体像对创建,将规则格网划分后的空间平面作为基础,综合利用像方特征点和物方面元,以及多视影像上的成像信息和特征信息,采用参考影像不固定的匹配策略,对无人机采集的多视影像进行密集匹配,利用并行算法快速、准确获得多视影像同名点坐标,进而获取高密度三维点云数据并生成DSM,最后通过纹理映射得到全要素三维模型[8]。具体实验步骤如下:
1)数据分块;
2)空中三角测量加密;
3)刺点,导出空三成果;
4)导入Context Capture建模;
5)生成实景三维模型;
6)生成正射影像(DOM);
7)将DOM导入EPT,接边,整合,补洞,修错,裁剪,分幅;
8)在第7步进行同时,在EPS中进行数据采集,绘制线划图(DLG)。
本阶段的研究成果为三维实体模型和地形,如图2~3所示。
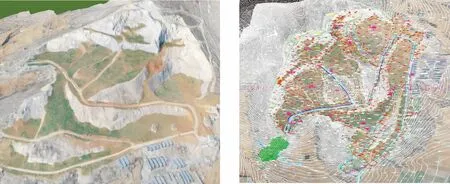
图2 研究区三维模型(矿山1) 图3 研究区平面地形(矿山1)
3.3 方格网法土方计算
根据设计高程和实测得到的地面密集点云,按照设定的方格网大小,将研究区划分为若干个方格,对于每个方格按照长方体进行体积计算作为该方格的工程量,最终通过将各个方格网累加得到工程量计算区域总工程量。通过密集匹配产生密集点云,首先将各网格内各高程点高程相加,取平均值并与设计高程值相减,如式(2)所示。
(2)
(2)式中,Hij为i行j列方格网的高程,k为落在该方格内的点的个数,Hj为落在该方格内点的实际高程,HD为设计高程。根据设定的方格大小得到每个方格的面积,再按照长方体体积的公式计算得到每个网格的工程量,最终的工程量等于各方格工程量之和,如式(3)所示。
(3)
(3)式中,V为计算得到的总工程量,n为测区的方格个数,a、b分别为方格网的边长。
4 成果分析
4.1 三维模型精度分析
本文通过校核点(RTK和全站仪实测)与加密解算点(三维模型点云数据)的平面误差MS和高程误差MH来评定成图精度。首先在测区内均匀选取50个外业校核点,并利用GPS-RTK流动施测其三维坐标(X,Y,H);再将校核点的三维坐标与对应的加密解算点坐标进行对比,计算三维坐标的绝对误差ΔX、ΔY、ΔH和ΔS;最后采用式(4)、式(5)计算得到MS和MH。
(4)
(5)

精度检测结果见表1。
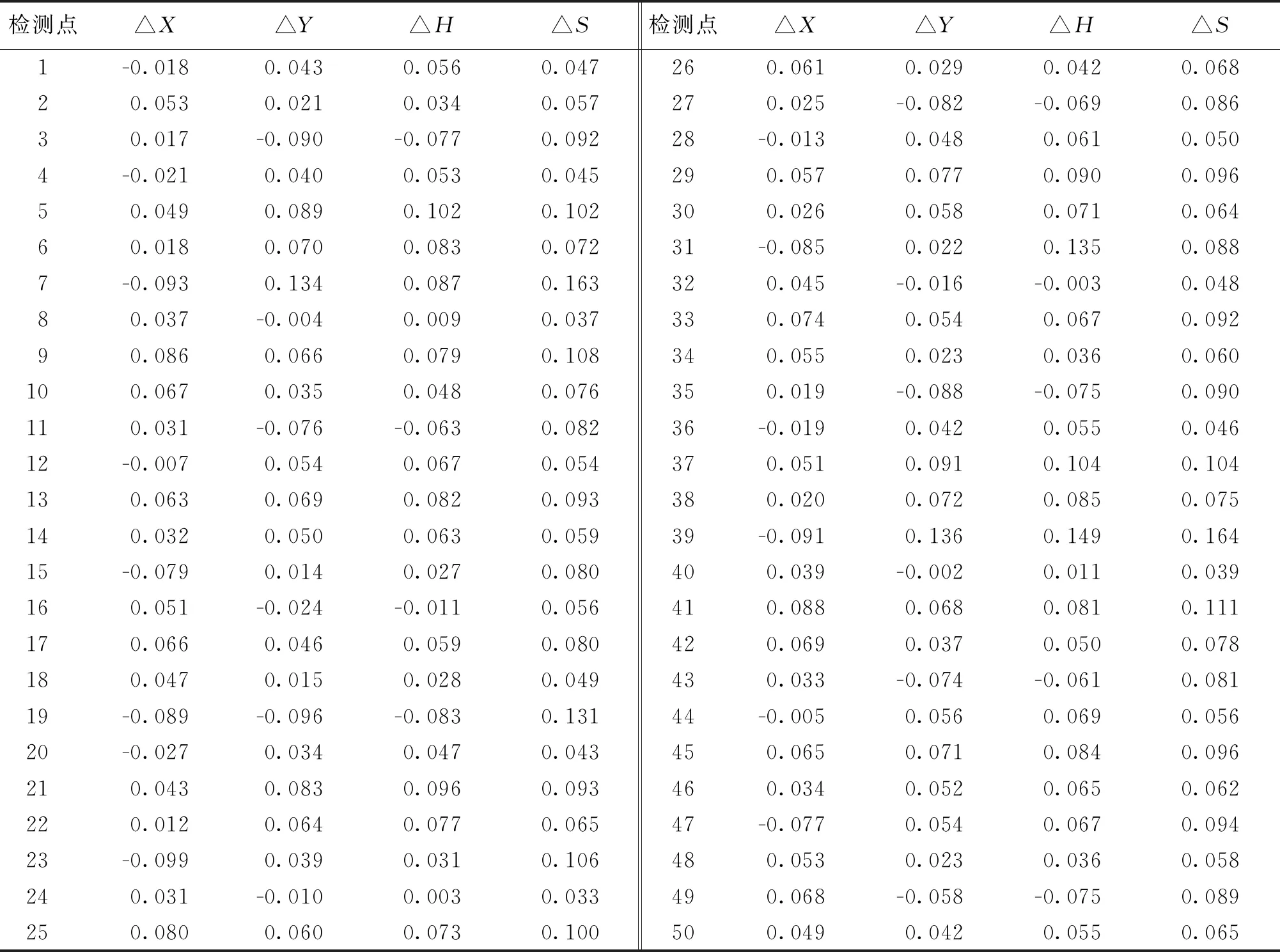
表1 精度检测统计表 m
通过表1运算,得到MS=0.083 m,MH=0.069 m。航测区域属于山地、丘陵地带,本次航测绘制的1∶2000地形图满足GB/T7930-2008《1∶500 1∶1000 1∶2000地形图航空摄影测量内业规范》的精度要求。
4.2 土石方量精度分析
土石方量精度分析分别采用基于无人机倾斜摄影测量和全站仪外业测量进行填挖土石方量计算。利用二者的原始高程点和施工清运高程点,形成原始自然面和施工面。利用南方CASS9.1先对设计面构建DTM,再利用5 m方格网法计算挖、填土方,具体方量见表2~3。
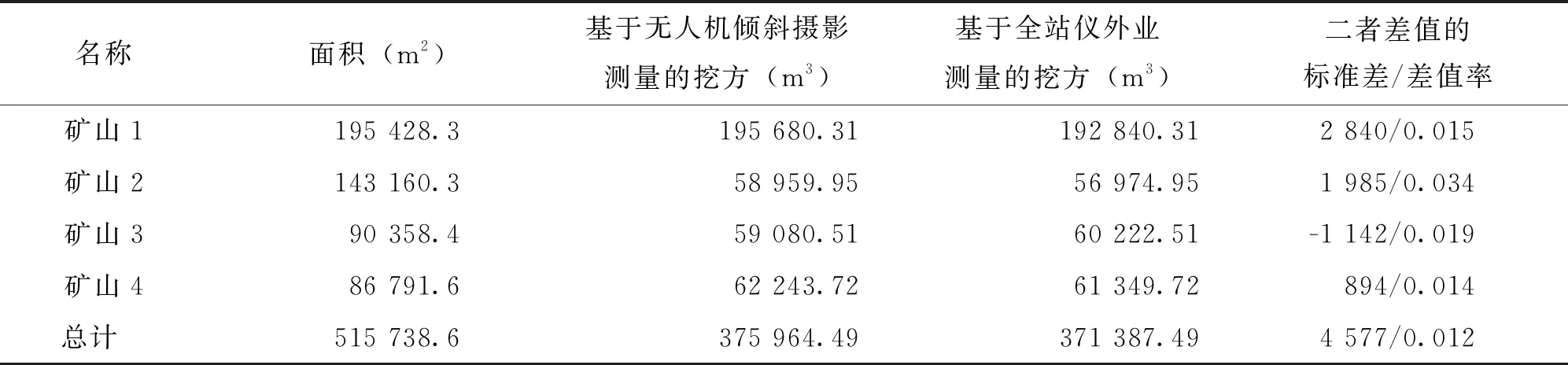
表2 土石方量(挖方)计算结果精度对比
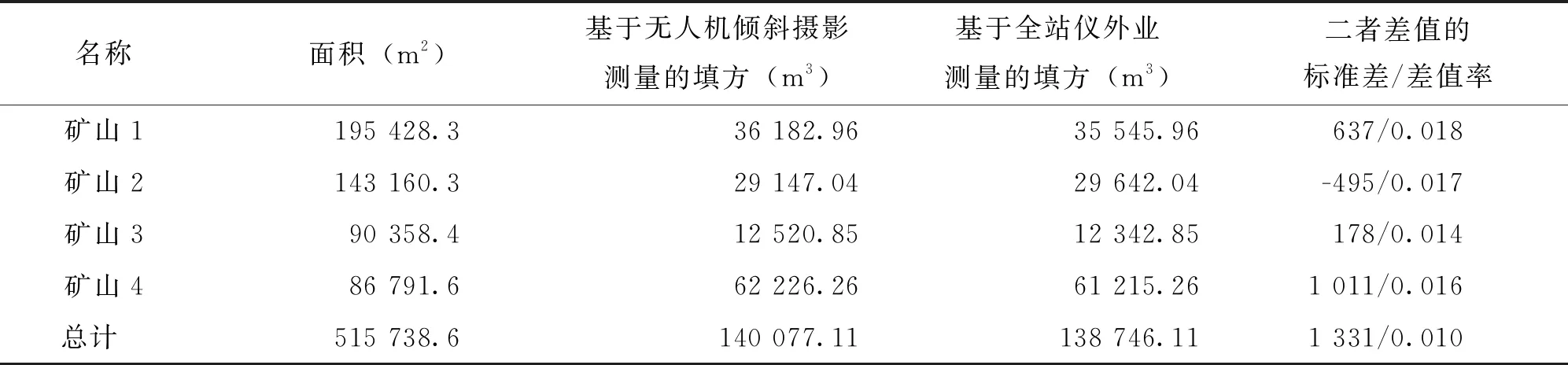
表3 土石方量(填方)计算结果精度对比
通过表2可见,两种方法的挖方差值为4 577 m3,差值率为1.2%;由表3可见,两种方法的填方差值为1 331 m3,差值率为1.0%。国家规范对土石方量测量误差没有明确规定,测量难度不同的场地土方计算误差的差别会较大,根据经验,相对平缓到高洼不平的乱掘地土方测量误差一般掌握在3%~10%,可见本文研究的工作模式是完全满足工程精度要求的。
5 结论与讨论
本文以皖北某露天矿山生态修复项目土石方量计算为研究对象,利用无人机倾斜摄影测量系统获取研究区域影像,采用倾斜摄影测量技术建立三维模型,利用方格网法进行土石方量运算,得到较精确的结果。本次研究采用的工作模式相较于传统工作模式的特点有
1)安全性。测量人员不用去亲临一些滑坡或落石区域,有效保证人身安全。
2)全面性。通过三维建模有效地分析测区全局的变化情况。
3)精度高。相对于传统方法,对于大块区域的计算精度基本相当,但对于相对零散的石块堆,将有效提高精度。
4)效率高。本工作模式有效减少外业工作量,提升工作效率。
