逆向自洁式清扫车结构设计
2021-04-09刘荣辉
刘荣辉
(吉林农业科技学院 机械与土木工程学院,吉林 吉林 132101)
当前的地面清洁工具存在两个发展趋势,一是经济条件好的地区使用机械化、自动化程度较高的多功能清洁车作业,这类清洁车的优点是节省劳力、效率高、质量高;缺点是体积大、结构复杂、成本高[1-3].二是大多数地区为节省经费,清洁作业仍使用原始的扫帚和拖把方式,该清洁方式不仅劳力较多、效率低,而且尘土飞扬,影响环境卫生.通过对现有同类产品的市场调查,并对其结构和功能进行综合比较,市场现有的地面清洁产品主要存在以下不足:传统清洁产品的劳动强度大、工作效率低;电力驱动清洁产品价格昂贵;大多无自洁功能,清洁质量的一致性差.
本文设计开发了一种结构简单、清洁质量高的清扫车,以使用者推力为动力源,应用了现代设计方法和理论,保证了小车在功能高度集成的要求下,结构紧凑,从而确保了本装置的经济性与实用性,以其多功能、低价格、高性能、结构简单的突出优点,可以在车站、商场、医院等场所得到广泛应用..
1 清洁车的系统组成及其工作原理
清洁车总体方案设计如图1所示.他由清扫机构、逆向清洗机构、过滤装置、喷淋自洁装置、抬升机构等组成.
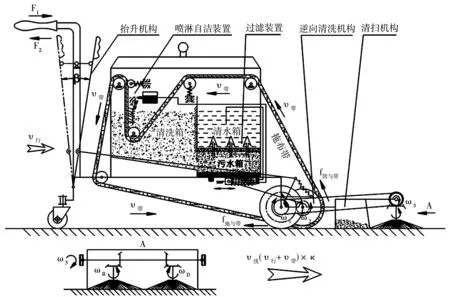
图1 逆向自洁式地面清洁车总体方案示意图
清洁车采用逆向清洗原理,以人推动为动力.人力推动小车运动,动力传递给小车行走轮,将行走轮变成驱动轮,驱动轮通过齿轮机构把动力再传递给滚筒,拖布带在滚筒静摩擦力作用下,相对于地面作逆向清洗运动,同时驱动轮通过带传动带动立式圆锥式清扫机构,把灰尘和大粒度杂物扫入集尘箱内[4].拖布带采用整周式循环运动方式工作,作业过程中利用水池对拖布带进行水浴,并采用喷淋自洁的方法去除带上尘土等杂物,再经过一对滚轮的对压作用,挤掉带内多余水分,从而达到适宜地面清洗湿度,实现循环清洗,进而实现拖布带高效清洁作业.
2 清扫车方案设计
2.1 清扫机构
清扫机构设计在清洁车的最前端,作用是将尘土、大粒度杂物清扫到集尘箱内,有利于拖布带清洗作业,如图2所示.
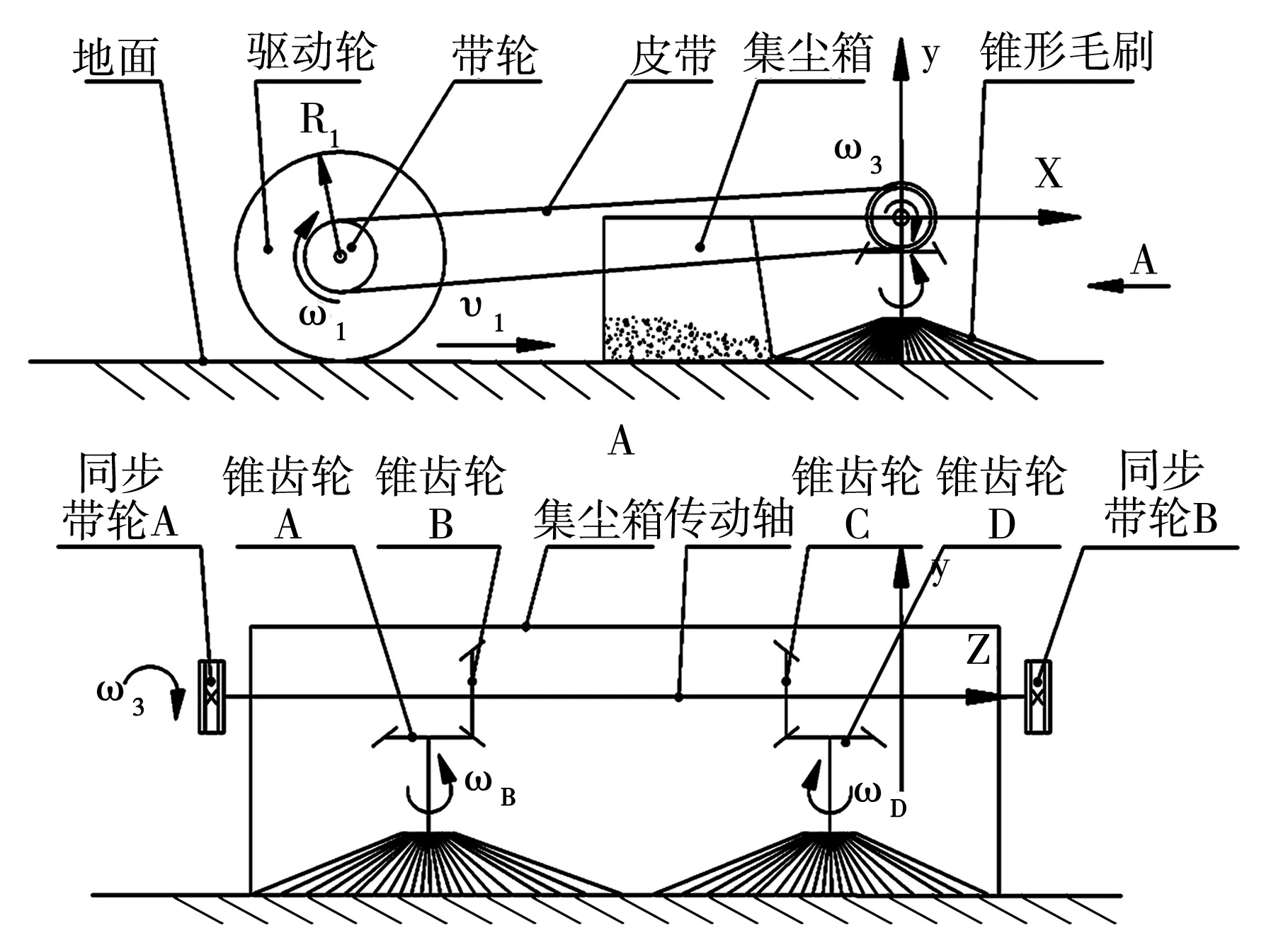
图2 清扫机构原理示意图
清扫机构动力由清洁车驱动轮提供,驱动轮通过皮带把动力传递给立式锥形刷,毛刷旋转把尘土、大粒度杂物扫进集尘箱中收集起来.清扫机构锥形刷作业转速过高造成尘土飞散,污染环境;速度过低,不能达到清扫目的,需要限制锥形刷转速在一定范围内工作.
2.2 逆向清洗机构
逆向清洗机构在清扫机构后,由整周式拖布带传动机构组成.清洁车行走时带动驱动轮运动,驱动轮通过齿轮传动机构带动滚筒转动,在拖布带与滚筒静摩擦力作用下,实现连续逆向回转运动,对地面进行循环清洗作业[5].为了达到高效清洁目的,清洗机构采用齿轮增速传动机构,从而使拖布带获得较高的逆向回转运动.
逆向运动是:假设清洁车驱动轮以某固定方向作回转运动,以驱动轮运动为参考系,与其定义相反为逆向运动.整周式拖布带清洗方式,应用逆向运动能有效提高工作效率和质量.
逆向清洗机构原理示意图如图3所示,清洁车驱动轮通过齿轮机构,把动力传递给滚筒,拖布带在滚筒静摩擦力的作用下,实现连续逆向运动.
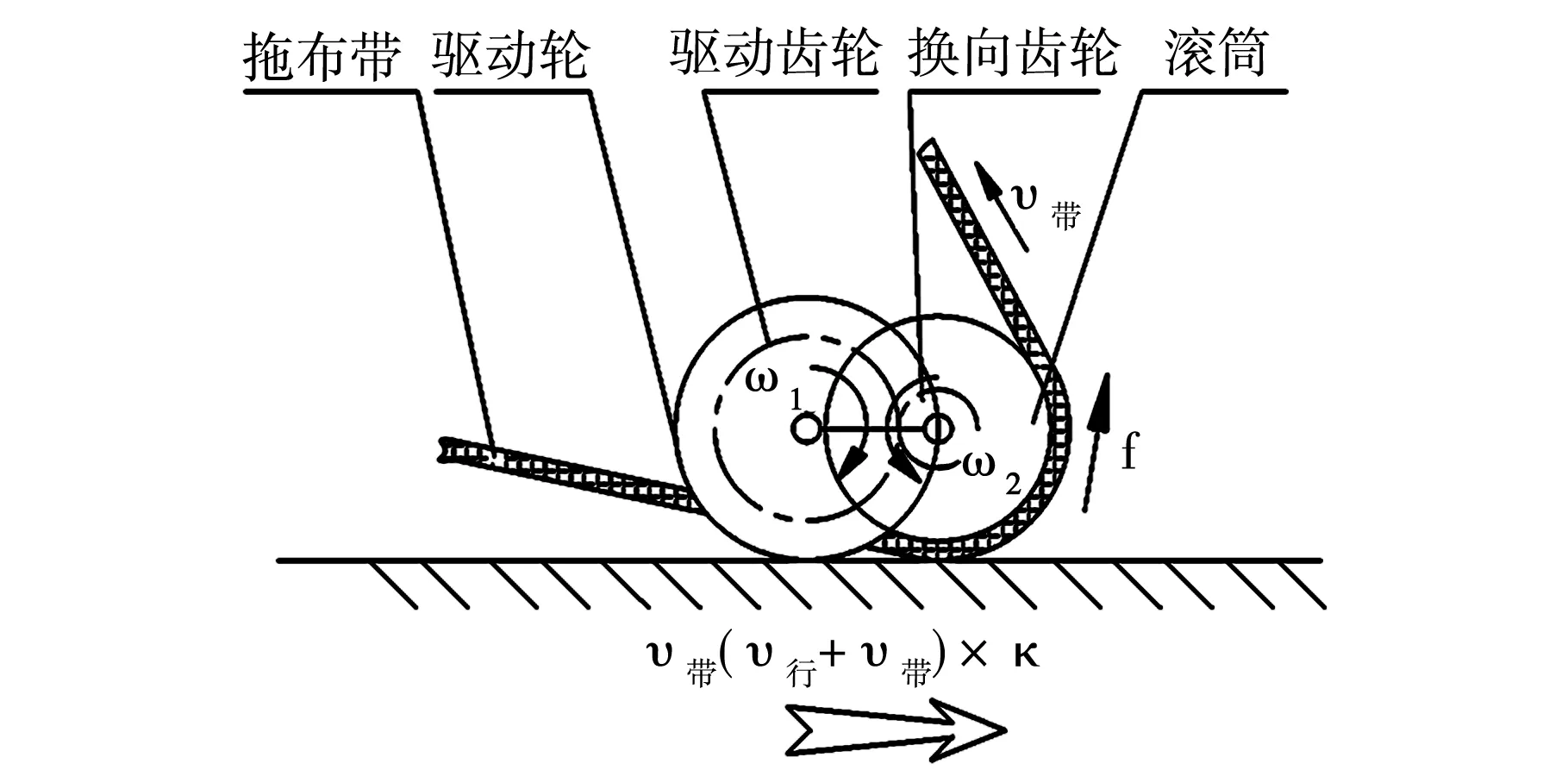
图3 拖布带逆向清洗机构原理示意图
2.3 喷淋自洁装置
拖布带循环清洗作业,带清洁度逐渐下降,影响清洗质量的一致性,最终导致清洗效率和清洗质量的降低.
喷淋自洁装置作用是拖布带循环作业过程中,同时进行自洁,保证清洗质量和效率.喷淋自洁装置如图4所示.
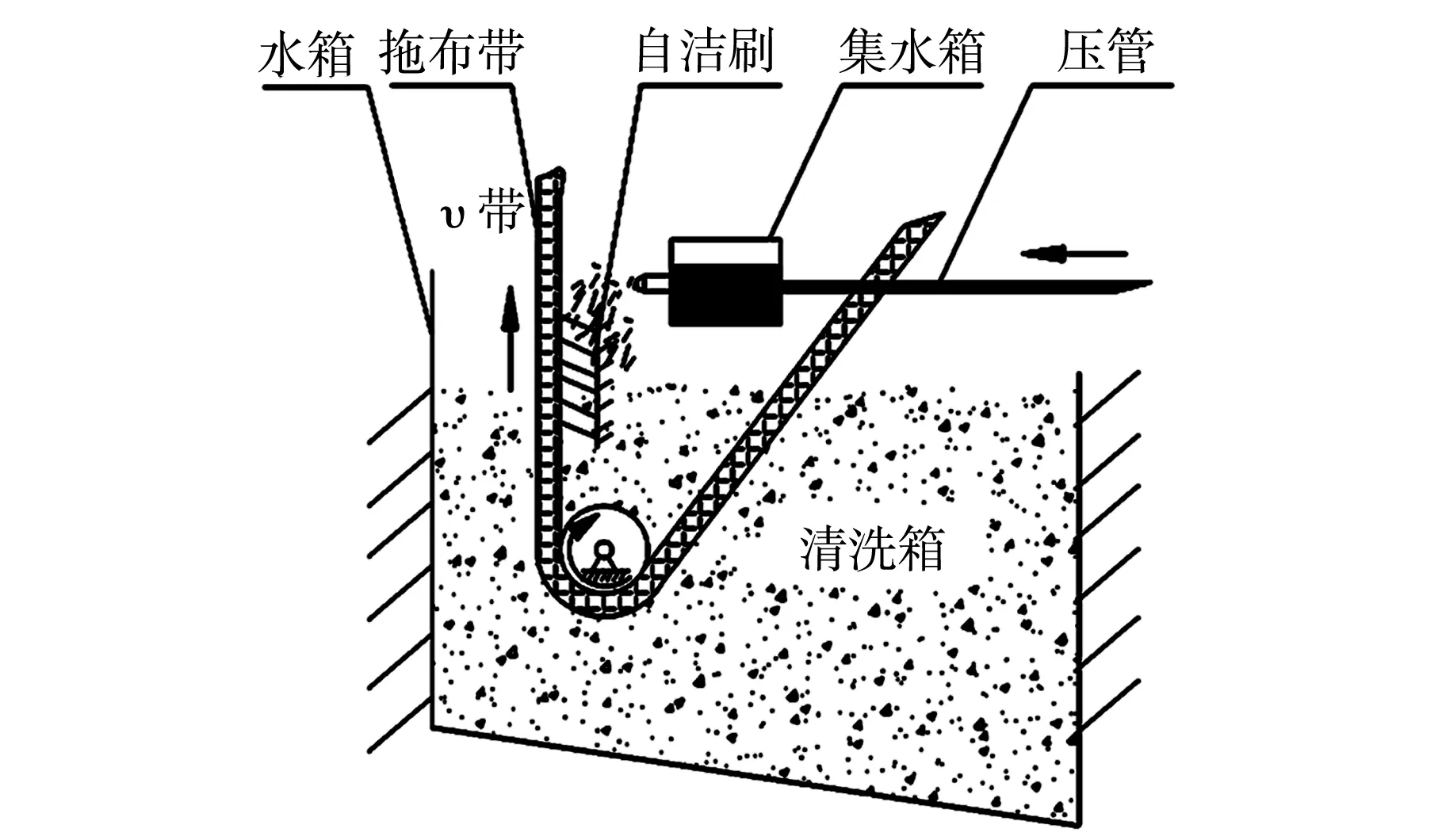
图4 拖布带喷淋自洁装置
在拖布带垂直运动方向上安装自洁刷,带向上运动过程中,始终和毛刷接触,在毛刷和喷淋水清洗作用下除去污泥.
2.4 抬升机构
清洁车作业实际是拖布带和地面线接触运动,在无作业情况下希望清洗机构和清扫机构脱离地面,这样可以提高整车运转的灵活性,有利于清洁车拐弯、越障和远距离换水等运动.
抬升机构使用平面四杆机构,如图5所示.摇杆1在右限位销作用下限制摇杆2脱离地面,辅助清扫和清洗机构作业.摇杆1顺时针转过一定角度,通过左限位销限位,实现无作业负载运动[6].
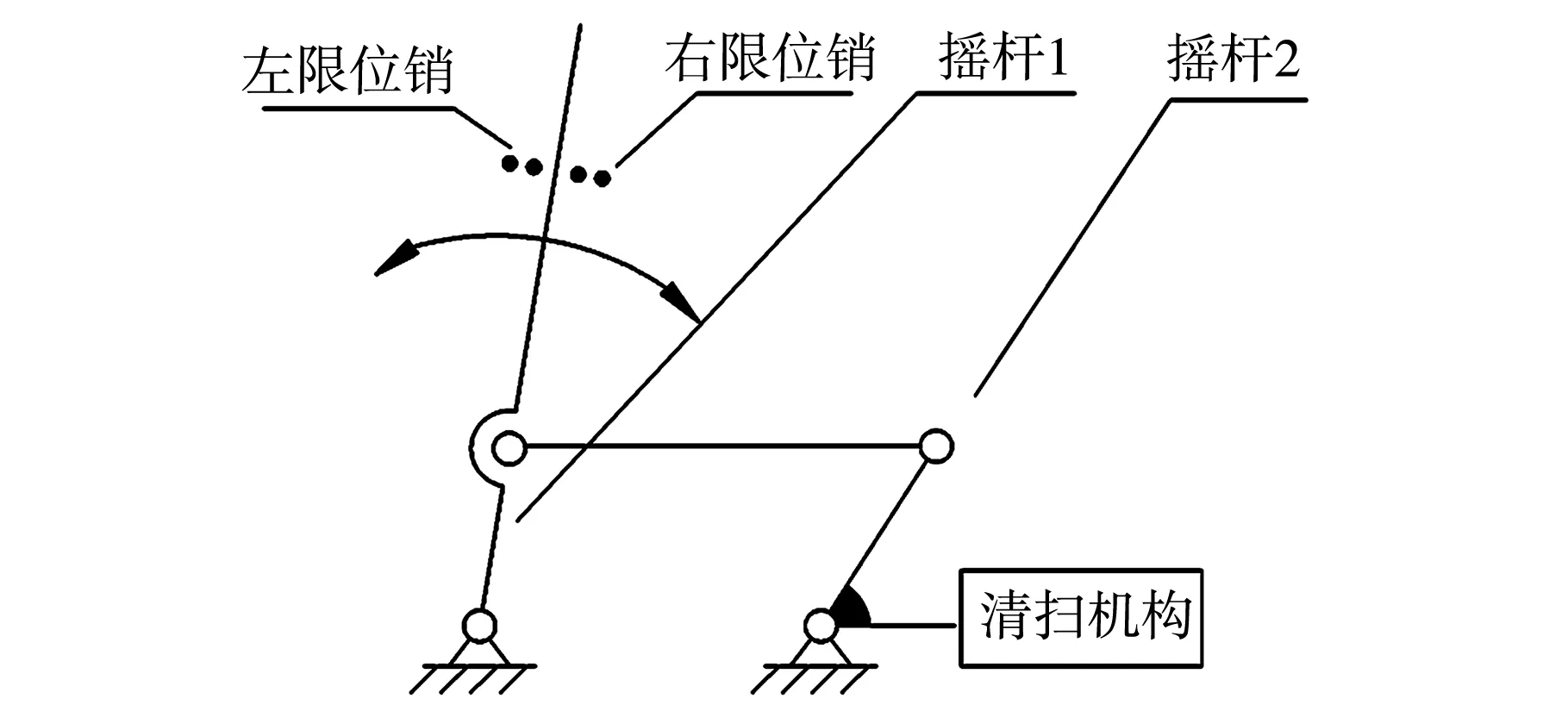
图5 平面四杆抬升机构原理图
2.5 辅助机构
2.5.1 挤压机构
清洁车上设计了拖布带挤压机构,拖布带在循环作业和自洁过程中,能有效地挤压掉拖布带内多余的水分,适宜地面作业湿度,提高清洗效果.拖布带挤压机构如图6所示.
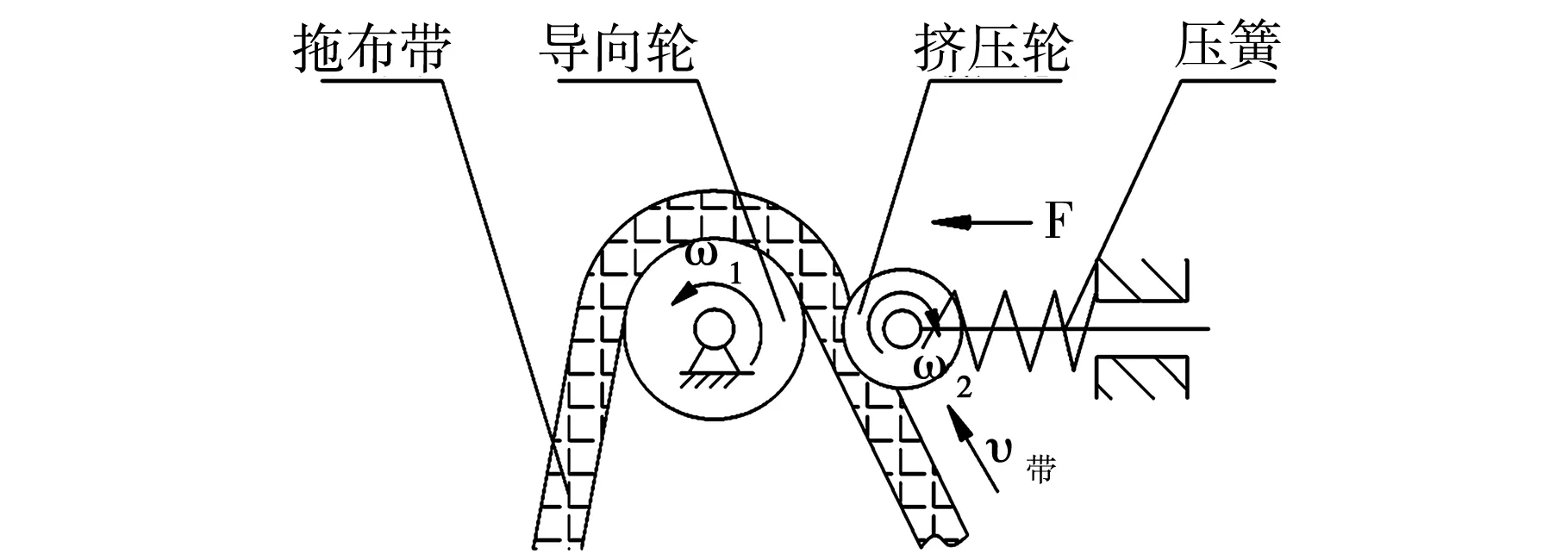
图6 拖布带挤压机构原理示意图
挤压机构采用弹簧可调压缩机构.弹簧和挤压轮对拖布带进行初步预紧,适合拖布带循环运动作业,通过弹簧可调压缩机构可以进行适当微调预紧.
2.5.2 张紧机构
拖布带是柔性体,具有柔性变化,作业过程中发生一定量伸缩变形.滚筒和拖布带静摩擦力是拖布带清洗作业的动力,在摩擦系数一定条件下,张紧力是影响拖布带与滚筒静摩擦力主要因素,张紧力过小带出现松弛打滑,过大增大导向轮摩擦负载,影响拖布带正常作业[7-8].清洗机构无作业抬升后,在张紧机构作用下,自适应拖布带空间变化预紧,所以张紧机构的设计很有必要.张紧机构如图7所示.
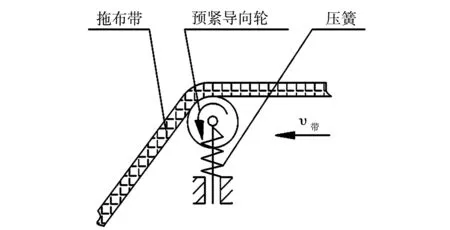
图7 拖布带张紧机构原理图
在拖布带作业过程中,整个张紧机构处于受压状态.张紧机构在一定范围内,自适应拖布带作业张紧[9-11].
3 结 论
本文提出了集清扫、逆向清洗、自洁等多功能为一身的设计方案,对清洁车的车体、驱动及传动系统、清扫装置、逆向清洗装置、自洁装置、拖布带提升装置进行了合理的设计,具有如下特点:
(1) 采用了拖布带逆向清洗机构,提高了清洁效率.
以人工推力为动力,通过简单的传动机构,使拖布带相对于地面作逆向相对运动,增加了单位时间内拖布带相对地面的清洗距离,提高了清洁效率.
(2) 采用了拖布带喷淋自洁机构,保证了清洁质量的一致性.
使用水浴、喷淋、脱水等综合措施,能够始终保持拖布带清洁度,使清洁车的清洁一致性得到充分保证.
(3) 实现了清扫、逆向清洗、自洁多种功能,实用性强.
清洁车集清扫、逆向清洗、自洁等多项功能于一体,具有很强的实用性,易于产品化推广.
