具有温度补偿的高精度同步数据采集
2021-04-09李盘文彭瑞元
王 宽,李盘文,彭瑞元
(中国飞行试验研究院, 西安 710089)
数据采集系统作为测试系统的核心的部分,已被广泛用于航空、航天等工业生产及科研领域[1]。随着飞机航电系统的发展,机载测试设备的使用环境越来越恶劣:电磁干扰越来越多、温度变化越来越大,这些因素直接影响数据采集系统的测试精度;同时为了满足不同系统之间数据融合分析的需求,必须实现同步采集。因而,设计一个具备温度补偿、抗干扰能力强的同步数据采集系统是有必要的。
采集系统中数据的精度主要与高频干扰[2]、量化误差[3]、噪声误差[4]、温度[5-6]等因素有关。通常为了减少高频信号的干扰,需设计相应的抗混叠电路[7],但这种方法只能滤除高频信号,无法减少信号采集过程中的量化误差;文献[8]提出了一种过采样的滑动平均滤波算法,该方法有效降低了系统噪声的功率谱密度,但滑动平均滤波增加了系统的计算量;文献[9]对AD转换后的采样值进行增益校准,有效提高了系统的采集精度,但其只在常温下进行校准,当环境温度变化较大时,采集精度较差。
针对上述方法中采集精度差的问题,设计了一种带温度补偿的高精度同步数据采集系统。该系统首先结合六阶巴特沃斯(Butterworth)抗混叠滤波器设计了过采样抽取滤波算法,避免了系统中的电磁干扰等因素对信号采集的影响,然后在不同温度下,对系统的满量程误差进行测量,建立了满量程误差与温度变化的模型,并结合系统的起始误差和增益误差,建立了带温度补偿的增益误差校准模型,有效减少了系统温漂及量化误差对采集精度的影响;接着提出了基于时钟分相法的时间同步算法,实现了本地秒脉冲(1 pps)与外部秒脉冲的时钟同步,满足了不同测试系统之间数据融合分析的需求。最后利用直方图分析法对采集数据进行分析,结果表明该方法能够有效减小系统的测量误差;同时通过同步性试验表明该系统的同步精度优于150 ns,满足了不同系统之间数据融合分析的要求。
1 系统总体方案设计
本系统的总体结构如图1所示,系统主要由抗混叠滤波器,模数转换模块,FPGA模块组成。系统的工作原理:首先设计了六阶巴特沃兹抗混叠滤波器,滤除信号中的高频分量;然后采用过采样抽取滤波,降低系统中噪声的功率谱密度;之后结合温度补偿校线,对采集数据进行温度修正得到最终采样数据,最后采用时钟分相法与PID算法,实现本地 1 pps 与外部1 pps的时钟同步。

图1 系统总体结构框图
2 过采样抽取滤波
过采样抽取滤波是一种数字滤波技术,能够有效减少信号的噪声,提高系统信噪比[10]。其关键技术包括两方面:提高信号采样率,以数十倍的奈奎斯特频率进行采集,实现过采样;以奈奎斯特频率对采样数据进行抽取,降低采样率,实现数字滤波。
过采样抽取滤波的原理为:由于信号中的噪声功率谱一定,提高信号采样率可减小噪声的功率谱密度[11],之后再通过抽取滤波降低采样率,则抽取信号中所包含的噪声将减小,从而提高系统的信噪比及信号的采样精度[12]。过采样抽取滤波过程如图2所示。
如图2所示,本系统使用6倍过采样进行9采集,即将系统原始采样频率fs倍频后形成6倍过采样频率fos,在一个原始采样时钟内采集并缓存6个采样值,然后去除最大最小值,最后将剩余的4个采样值求平均后得到最终码值yfilter,完成过采样抽取滤波过程。
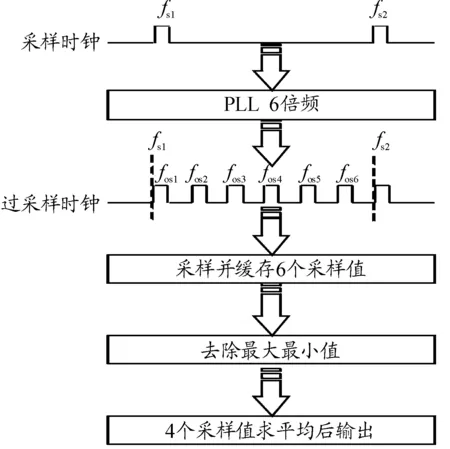
图2 过采样抽取滤波过程框图
3 温度—增益补偿校准模型
3.1 增益误差校准模型
增益误差校准模型如式(1)所示:
(1)
式(1)中:ycal为校准后的实际输出值;yo为起始误差;ys为满量程误差;yl为满量程理论值;yfilter为抽取滤波器的输出码值。
式(1)中的yo、ys、yl均通过校准获得,其获取方法:将系统输入引脚对地短接,测量AD转换的输出,经16次测量取平均值后,可得到系统的起始误差yo;将高精度稳压电源接入系统输入端,并经16次测量取平均值后,可得满量程误差ys;该高精度稳压电源经AD转换后的理论值为yl。
3.2 温度补偿模型
由于电路中存在模拟器件,其易受温度影响,在不同的温度范围下测量系统的满量程偏差,并绘制成曲线如图3所示,可见在30 ℃时,AD转换输出满量程偏差为0;当温度增加时,满量程偏差值在减小;当温度降低时,满量程偏差值在增加。

图3 满量程偏差随温度变化曲线
由于系统工作的环境温度范围为[-40 ℃,70 ℃],所以采样分段线性量化的方法在这个温度区间内建立满量程偏差随温度变化的模型如式(2)所示:

(2)
由式(1)和式(2)可得,将增益误差校准后的值减去随温度变化的满量程偏差可实现温度补偿,得到系统的最终输出yfinal,如式(3)所示:
(3)
4 时钟同步
将一个周期时钟信号做不同延时可得到不同相位的时钟信号,时钟分相法就是使用原时钟信号和延时后的时钟信号对时间差进行测量。如图4所示,将CLK1信号分别延时90°、180°、270°,可得到CLK2、CLK3、CLK4时钟信号。通过统计一段时间内4个时钟信号的上升沿数量可实现对该时间差的测量,其时间差ΔT的计算如式(4)所示:

图4 时钟分相原理示意图
(4)
式(4)中:fclk为时钟信号的频率;Nmax为时间差内4个时钟的上升沿总数。
时钟同步的具体步骤:分别获取本地和外部1 pps时间值;按照式(4)计算本地与外部1 pps之间的时间差;对式(4)的计算结果采用差分PID控制算法,计算出本地1 pps的修正量;修正本地1 pps的时钟计数值,实现时钟信号的同步。
5 试验结果分析
5.1 采集精度试验
为了验证本系统数据采集的优越性,将文献[8-9]和本文方法进行对比试验。具体过程为:在-40 ℃、常温、70 ℃等不同环境下,分别使用以上3种方法的采集系统对同一个稳定的直流信号源进行采集,然后绘制对应的直方图和高斯PDF曲线。为了节约篇幅只列出了常温下的直方图,如图5、图6、图7所示。同时对不同温度下样本的最大值、最小值、均值和标准差进行计算,结果如表1所示。

表1 数据统计
由图5、图6、图7可看出:常温下图7数据分布的宽度变窄,更满足高斯分布,说明本文方法能够有效滤除噪声干扰,即采样数据稳定性好,精度高。

图5 文献[8]采样样本直方图
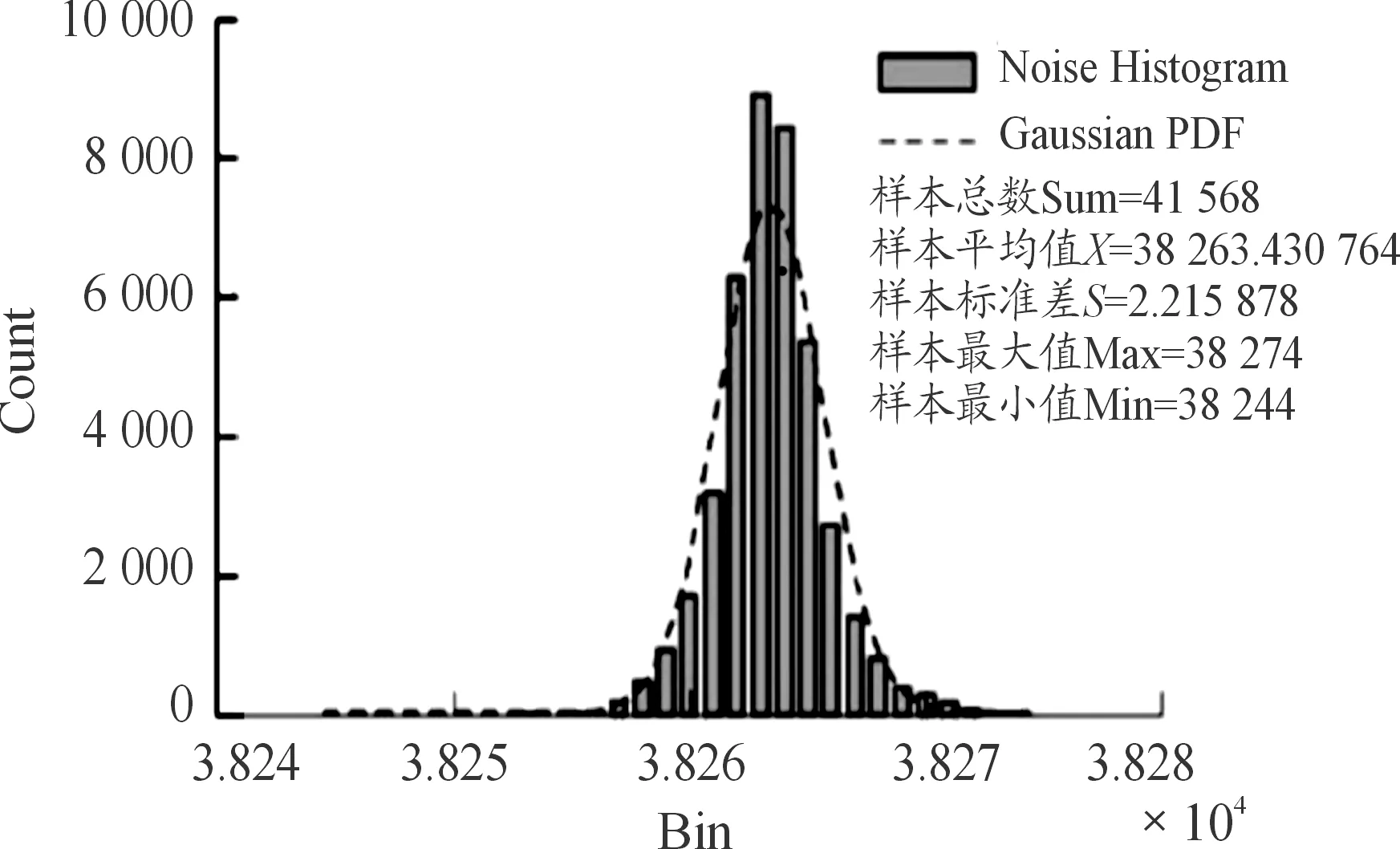
图6 文献[9]采样样本直方图
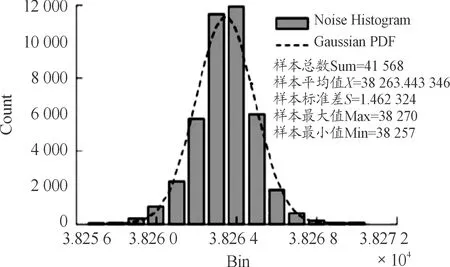
图7 本文采样样本直方图
由表1可看出:常温下3种方法的标准差都较小,即数据采集精度都较高,但随着温度变化文献[8-9]的最大、最小值、标准差变化非常大,而本文的数据变化相对较小,说明本文的方法能够补偿温度对采集数据的影响,提高数据的采集精度。。
5.2 同步采样试验
为了验证本系统的同步特性,对板卡施加外部1 pps信号,并用示波器观察外部1 pps信号与本地1 pps信号,看本地1 pps信号能否跟随外部1 pps信号。通过观察,在1 h内,本地1 pps始终能够跟随外部1 pps信号,其跟随波形如图8所示。

图8 1 pps同步跟随波形
由图8可见:在1 h内本地1 pps能够很好的同步跟随外部1 pps信号,其同步精度优于150 ns,而实际试飞测试中要求不同系统之间的时间同步精度不大于1 ms,可见本系统满足试飞测试的同步采集需求。
6 结论
1) 充分考虑数据采集过程中高频干扰、量化误差、噪声误差、温度等因素对采集精度的影响,建立了带温度补偿的增益误差校准模型,设计了采样抽取滤波算法;2) 提出了基于时钟分相的时间同步算法,实现了本地与外部秒脉冲的同步,实现了信号的同步采集;3) 该数据采集系统能够有效滤除系统噪声,提高系统测试精度;4) 该系统能够补偿温度对数据采集系统的影响,提高数据采集精度;5) 系统的同步精度优于150 ns,满足了不同系统之间数据融合分析的要求。
