基于双十字形测量结构的磁信标定位方法*
2021-04-08震杨宾峰王润管
赵 震杨宾峰王 润管 桦
(空军工程大学信息与导航学院,陕西 西安710000)
磁是自然界最普遍的现象之一,早在战国时期,人们就开始使用司南确定方位,随着人类对磁场的深入探索,磁技术被广泛应用到医疗、探矿、船舶和飞行器定位等领域[1-6]。 与无线电定位技术相比较,磁定位技术抗干扰性更好,对于遮挡物的穿透力更强。
在磁定位技术中,基于磁梯度张量(Magnetic Gradient Tensor,MGT)的定位技术,算法简单,精度高,成为磁定位技术研究的热点。 张朝阳等[7]利用磁偶极子模型推导出了MGT 定位算法公式,并进行了仿真分析。 李青竹等[8-9]对多种MGT 测量结构进行了比较,证明十字形结构具有最小的定位误差。王润等[10-11]提出了旋转磁信标MGT 的计算方法,可有效分离噪声信号。
在磁信标定位过程中,地磁场对信标磁场影响较大,随着运动载体与磁信标距离增大,定位误差随之变大。 在降低地磁场影响方面,于振涛等[12]对单点MGT 定位算法进行偏微分求导,提出了一种改进算法,该算法计算过程较为复杂,对磁传感器精度要求较高。 邓国庆等[13]通过预先测量地磁场强度,利用差分的方法消除地磁场,带来人为因素影响。 针对这些问题,基于双十字形测量结构的磁信标定位方法从单点MGT 算法出发,设计了一套有效降低地磁场干扰的定位系统。
1 磁梯度张量定位原理
1.1 磁梯度张量
在空间直角坐标系中,磁感应强度用三维列向量B(Bx,By,Bz)表示,Bx,By,Bz为磁感应强度在x轴、y轴和z轴上的分量。MGT为磁感应强度三个分量分别在x轴、y轴和z轴上的变化率,共有9 个元素,用三阶矩阵G表示:
在磁信标定位系统中,一般使用永磁体作为磁信标,也可使用直流通电螺线管,此时磁信标空间磁场为静态磁场,由麦克斯韦方程组可知,磁感应强度的散度和旋度均为0,可求得G关于主对角线对称,且主对角线元素和为0,于是我们只需5 个独立的元素,便可确定任意空间点上的MGT。
1.2 磁梯度张量定位算法
磁信标尺寸远小于定位目标与磁信标之间的距离时,可将磁信标作为磁偶极子看待,并通过式(1)计算出空间任意点的MGT。 根据毕奥萨伐尔定理,与磁偶极子相对位置为r处点的磁感应强度为:

式中:μ0为真空磁导率,m为信标磁矩,nr为位置矢量r的单位矢量,r为矢量r的模。
假设r+dr处的磁感应强度为B′,则两点间的磁感应强度差为:

又因为
可得:

两点间MGT 还可表示为:
联立式(3)、式(4),得出MGT 定位方程:

1.3 两点磁梯度张量定位算法
针对MGT 定位算法很难直接降低地磁场影响这一问题,提出了一种改进算法,通过测量相邻两点MGT,并利用磁矩与磁感应强度相关公式,推导出不依赖目标点磁感应强度的定位算法。 磁感应强度与信标磁矩的转化公式为:

m为信标磁矩,A是一个与目标位置相关的矩阵,其表达式为:
式中:(x,y,z)是目标位置坐标,r为目标到磁信标的距离。 设空间上两点坐标为:

对应的磁梯度张量为G1、G2,依据式(5)、式(6)可得:
设两点间的距离矢量c=r1-r2。 联立式(8)、式(9),消去磁矩m,可得:

I是单位阵,G1、G2可通过磁测量结构计算得出,两点间的位置矢量c是预先设置的已知量,A1、A2只与r1有关,因此式(10)、式(11)是关于r1的非线性方程,通过设置目标函数,利用优化算法,能够求解出空间点的位置。
2 求解算法
较为常见的优化算法有最小二乘法、粒子群算法、萤火虫算法、免疫算法、差分优化算法等等。其中粒子群算法(Particle Swarm Optimization,PSO)是一种生物模拟优化算法[14-16],算法中的每一个解都是一个“粒子”,这些“粒子”对于被优化的函数都有一个适应值,通过不断迭代,完成设定的迭代次数或者达到要求的适应值,从而搜索出最优“粒子”。 相较于其他优化算法,PSO 算法收敛速度快、容易实现、全局搜索性能好,本文使用粒子群算法求解。
根据式(10),可设δ:

δ表示r1通过粒子群算法得到的解与其真实值的偏差,δ的模越小解越接近r1的真实值,因此可以用δT·δ衡量解的准确性。
设定目标函数f:

经过100 次迭代后,目标函数误差达到10-11数量级,能够保证系统具有较小的误差。
3 双十字形测量结构设计
MGT 定位系统的测量结构主要有三角形、十字形和正方形,对于测量误差而言,十字形优于正方形和三角形[17]。 考虑到需要计算两点的MGT,同时在系统定位过程中能够得出较准确的定位数据,较少出现定位误差突变,保持系统稳定性,在十字形测量结构的基础上构造出双十字形测量结构。 测量结构由水平、垂直两个平面十字形测量结构组合而成,如图1,共包含8 个三轴磁传感器,相邻两个传感器距离d均相等,传感器坐标轴对应平行。
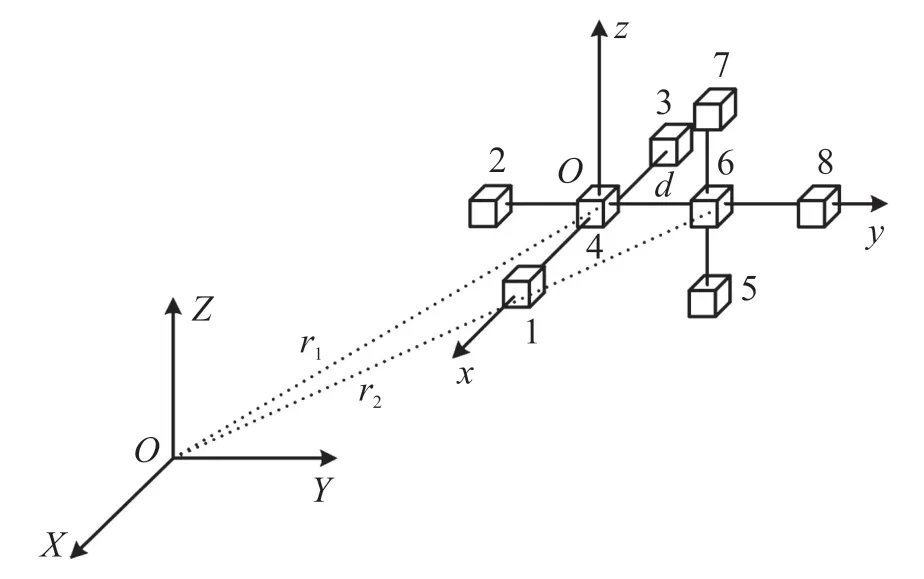
图1 双十字形测量结构示意图
以磁信标为原点构建空间直角坐标系,图1 展示了测量结构的内部关系,以及磁信标与测量结构的空间关系,测量结构被封装在一个长方体空间中,作为定位装置的一部分被安装在运动载体上。
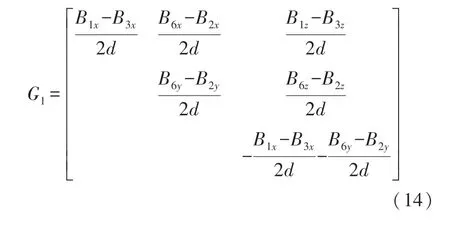
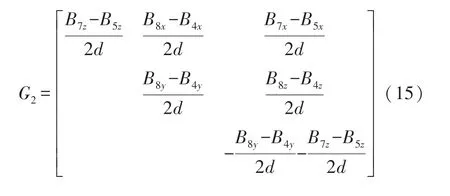
用Bij(i=1,2,…,8,j=x,y,z)表示传感器i在j方向上的磁感应强度分量,其中矩阵Gi(i=1,2)为对称阵,分别表示传感器4 和传感器6 所在点上的MGT 值,表达式为:
4 仿真实验
磁定位技术可应用于钻井、小型无人机起降、潜艇下潜和上浮等场景,在这些领域内,更关心竖直方向上的定位精度,因此设定运动载体沿竖直方向运动。 同时,两点MGT 定位方法是通过空间点的磁场信息与其位置信息建立对应关系,从而确定空间点的位置坐标,误差不随时间积累,在优化算法计算速度较快的情况下,不需引入位置与速度的约束关系就可实现实时定位。
仿真实验条件:建立以磁信标为原点的空间直角坐标系,信标磁矩m=(5×107A·m2,0,0),传感器间距设置为0.1 m、精度0.01 nT,粒子群算法最大迭代次数为100 次。 运动载体由点(20 m,20 m,2 m)沿直线运动至点(20 m,20 m,50 m)。 分别验证磁矩、传感器精度、传感器间距,以及引入随机噪声和恒定磁场后,基于双十字形测量结构的磁信标定位方法误差变化。
4.1 传感器精度对定位误差影响
随着传感器技术的发展,体积更小、精度更高的磁传感器逐渐出现,磁传感器应用领域更加广泛。为了达到实验目的,分析传感器精度对定位影响,设置传感器精度分别为1 nT、0.1 nT 和0.01 nT,信标磁矩为(5×107A·m2,0,0),传感器间距0.05 m,进行仿真实验,误差变化如图2 所示。
从图2 可以看出,传感器精度为1 nT 的定位误差最大,z 轴50 m 内最大定位误差为67 m,传感器精度提升后,定位误差显著降低,精度为0.01 nT 的最大误差仅为1.56 m,且96%的定位误差在1 m 以内,可以看出传感器精度对定位误差影响很大。 对传感器而言,精度越高、体积越小,价格就越高,制造工艺也会更加复杂,在选取传感器时,必须综合考量精度、稳定性、价格等要素。
4.2 传感器间距对定位误差的影响
考虑到计算MGT 时,必须用到传感器间距d,同时对于运动载体而言,测量结构不能过大,设置传感器间距分别为0.05 m、0.1 m 和0.2 m,传感器精度为0.01 nT,信标磁矩为(5×107A·m2,0,0),计算不同传感器间距的定位误差,结果如图3 所示。
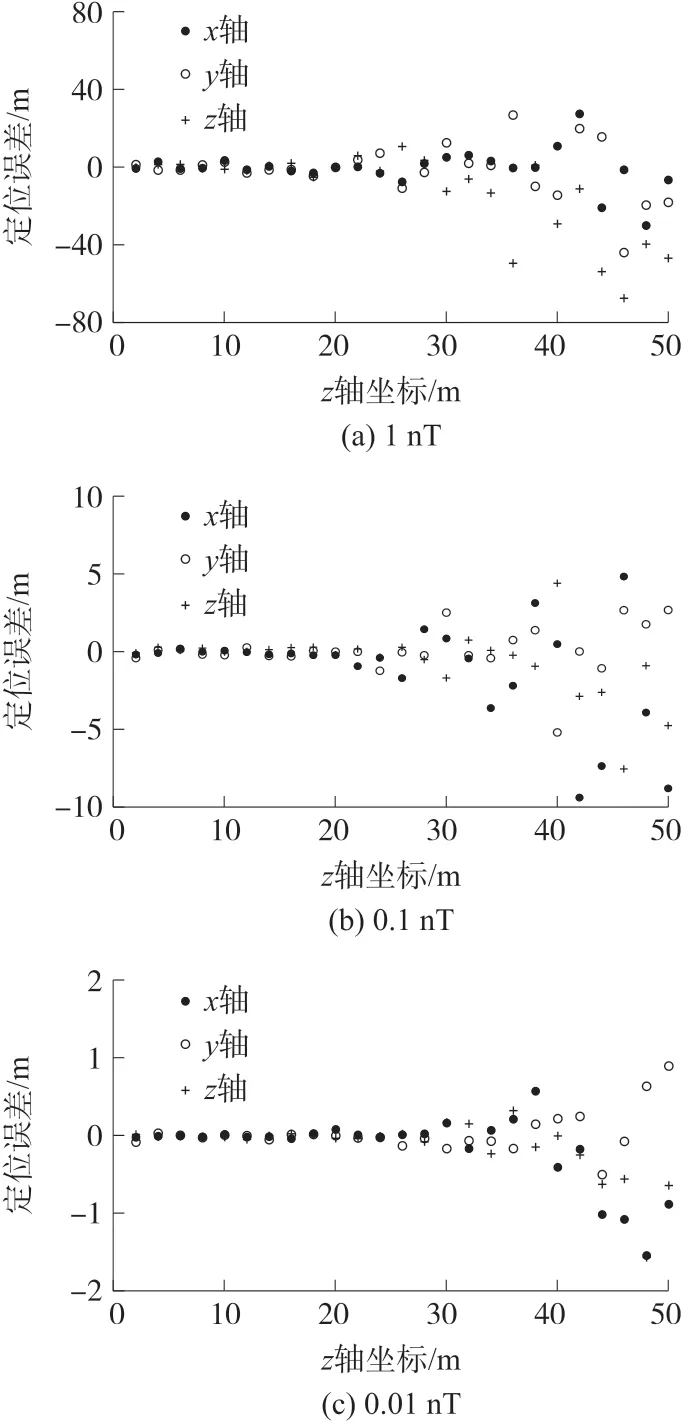
图2 传感器精度对定位误差影响
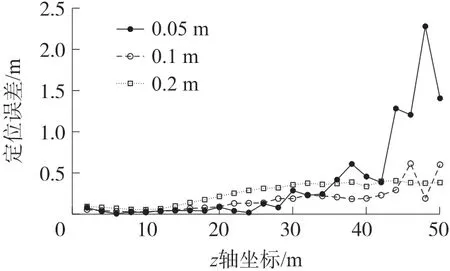
图3 传感器间距对定位误差影响
图3 中三条误差变化曲线相差不大,仅在z轴35 m 以后传感器间距为0.05 m 的误差变化较为明显,同时传感器间距与定位误差不存在比例关系,但是可以选择合适的传感器间距,确保定位误差符合要求,同时具有较好的平稳性。
4.3 磁矩大小对定位误差的影响
对于磁信标而言,磁矩会影响磁感应强度,磁矩越大,空间点上的磁感应强度也越大,同时磁信标的体积和成本也会增加,这里设置磁矩分别为(0.5×107A·m2,0,0)、(1.5×107A·m2,0,0)、(5×107A·m2,0,0),传感器间距为0.1 m,精度为0.01 nT,进行仿真实验,图4 表示不同磁矩的定位误差变化。
对比图4 中的三条误差曲线,磁矩为(0.5×107A·m2,0,0)时,误差变化范围从0.06 m 到3.62 m,相较于其他磁矩,误差较大。 整体上看,信标磁矩越大,误差越小、变化越平稳。z轴25 m 内,三条误差曲线最大相差0.2 m,25 m 至50 m 时,误差最大相差3 m,提高磁矩具有降低定位误差的作用,但提升信标磁矩的同时也会增加成本,在定位距离较近的情况下(25 m 以内),可以选取磁矩较小的磁信标,不仅能够确保较小的定位误差,还能降低系统成本。
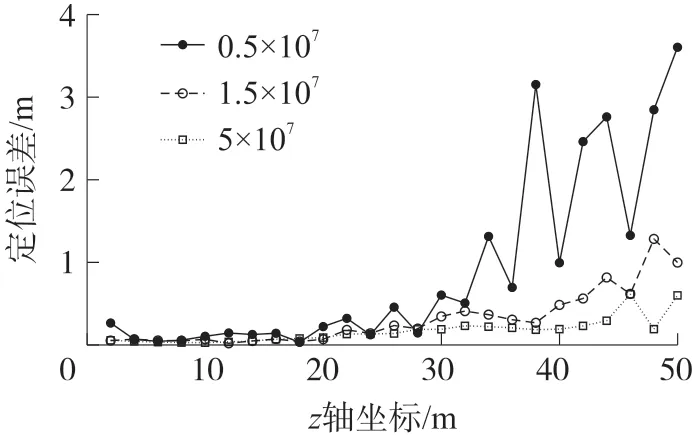
图4 磁矩对定位误差影响
4.4 随机噪声对定位误差的影响
在空间环境中存在着自然和人为的随机磁噪声信号,噪声会影响传感器对磁感应强度的测量,产生定位误差。 设置信噪比分别为70 dB、80 dB、90 dB的磁信号,进行定位误差对比,结果如图5 所示。
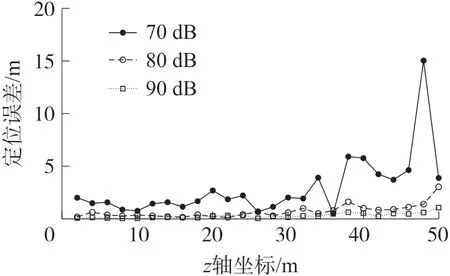
图5 信噪比对定位误差影响
从图5 可以看出,信噪比为80 dB 和90 dB 时,定位误差较小,环境中的随机噪声对定位影响不大,z轴50 m 内最大误差分别为3 m 和1 m。 70 dB 信噪比时,噪声持续对定位系统产生较大影响,相对定位误差达到100%以上,绝对误差最大达到15 m,严重影响定位可靠性。 从整体上看,信噪比越大,定位误差越小,在较强随机噪声(信噪比小于70 dB)影响下,系统定位可靠性变差。
4.5 恒定噪声条件下两种定位方法误差比较
地球表面附近存在着地磁场和各种异常磁场,这些磁场影响范围大,变化连续、平稳,在较小范围内,可认为地磁场恒定不变。 对于磁矩较小的磁信标,不能忽视恒定磁场引起的定位误差,于是在信标磁场中引入强度为(0,0,1 000 nT)的恒定磁场,计算十字形测量结构MGT 定位方法和双十字形测量结构两点MGT 定位方法的误差,结果如图6 所示。
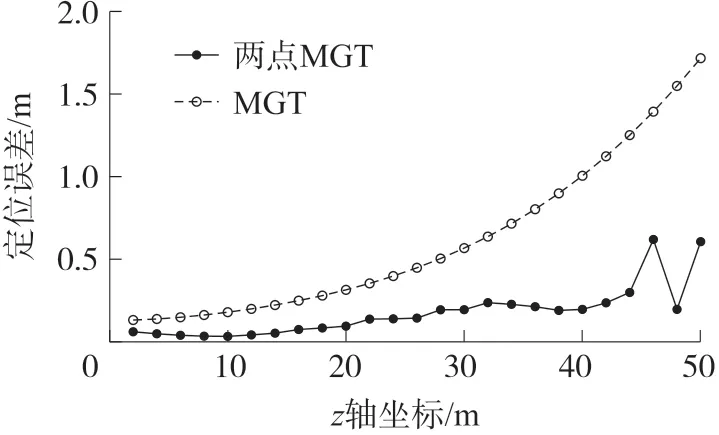
图6 MGT 和两点MGT 定位误差对比
图6 表明,在z轴方向加入1 000 nT 的恒定磁场后,MGT 定位误差随定位距离增大而缓慢增长,最大误差为1.72 m,大于两点MGT 的0.62 m。 可以看出,在地磁场和其他恒定磁场的影响下,基于双十字形测量结构的定位方法可有效减小定位误差,其结果优于十字形测量结构MGT 定位方法。
5 总结
本文提出了一种利用两点MGT 进行定位的方法,设计出了计算两点MGT 的双十字形测量结构,并通过粒子群优化算法求解出了目标位置。 仿真结果表明,z 轴25 m 外,磁传感器精度和信标磁矩是影响定位误差的主要内部因素,整体上看,传感器精度越高、信标磁矩越大,定位误差越小;不能忽略随机噪声对定位误差的影响,信噪比低于80 dB 时,定位误差显著增大,系统可靠性降低;地磁场和其他恒定噪声会对信标磁场产生影响,此时,基于双十字形测量结构的两点MGT 定位方法显现出其优越性,其结果优于十字形测量结构MGT 定位方法,同时相较于其他消除地磁场影响的方法,本文方法实现简单,定位精度高,不存在人为因素影响。
