矿井提升机电气控制系统行程控制的研究
2021-04-08王鹏
王 鹏
(晋能控股煤业集团晋圣公司, 山西 晋城 048000)
引言
在一些矿山生产过程中矿井提升机是主要的生产设备。煤炭行业使用矿井提升机占有数额为4 000多套,其余生产行业矿井提升机使用也较为频繁。尽管各类矿产过程对矿井提升机的需求比较大,但由于一些经济和历史的原因,其电控系统存在技术落后等各类问题,直接导致了提升机生产效率以及安全性低,也使得提升机自动化发展相对滞后[1-2]。为满足矿井现代机械化的发展需求,需要改造提升机控制系统。
1 行程控制的基本原理
矿井提升机控制的目的主要是针对其位置的控制,给定地点可保证其停车位置相对更为精准,因此,对整个系统的准确性要求极高。在提升机运行的整个过程中,采集传感的信号主要是依据微机实现的,例如通过井筒位置等信号判断出将要停止的具体位置,对其达到控制和保护的目的要求。
行程控制的本质为位置控制,在给定的行程中,速度给定的信号强弱主要是基于提升机的行程。提升机存在不同的运行速度,当提升机进行减速时,需给定的S 形速度可根据运行速度的不同,在不同的时间段下输入开始运行速度即将要减弱的信号。若整个运行过程中的控制因素为时间,当给出一个速度时,建立一个有关减速点的开关;当速度改变时,仍需再设置另一个减速开关,这就造成不同的速度需对应不同的减速开关,形成了复杂化的控制系统;若控制方式为手动时,尽管可以控制给定信号的强弱,但难以控制减速的速度以及时刻,并不能使系统得到最佳的时间和速度以到达停车点位,这直接导致提升周期以及停车位置的不准确。
给定行程、给定速度的信号强弱主要基于两者之间的距离△S 的大小确定的,这两者指的是所提升的容器与停车点之间的距离。当△S 的值较大时,给定速度的信号较强;当△S 的值较小时,速度给定的信号弱。通过给定速度信号,即可判断出提升机的位置,与其运行时间以及运行速度均无关。
在图1 中,Vmax设定为最大的提升速度,a1和a2分别代表加速度和减速度,减速区间为t2—t3。根据一系列的公式推导得出据该公式得出,当恒减速时,提升机运行速度V 与停车位之间呈现二次函数的关系,如图2 所示。当确定减速度a2并得出停车位与减速位之间的行程距离ΔS 时,便可得出相应大小的速度信号。基于速度信号,给定信号可通过在给定的电路中转化为相应的电位信号。
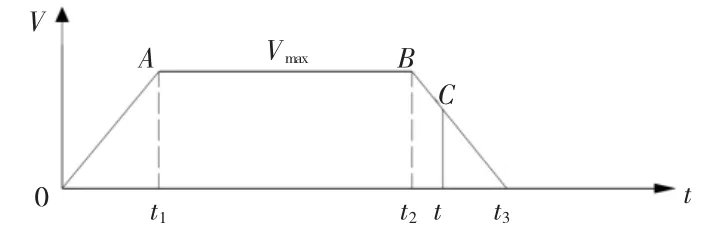
图1 三段速度图
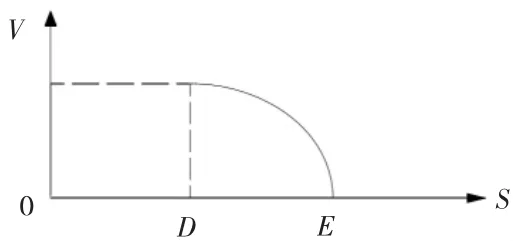
图2 速度与行程的二次函数图
2 行程控制的数学模型
通过计算机软件S 化提升机的平滑变化折线形运行速度曲线,得出S 形给定速度曲线。同时,在加速以及减速运动阶段,根据修改调整相关提升机的控制参数,可得出相应的要求给定速度曲线。通过分析行程控制的数学模型,可得出在实际应用过程中的控制策略[3]。
在提升机的运行中,不仅对安全、高效、平稳提出高要求,而且工作人员的舒适度也应为重要的考虑因素。如图3 所示为折线形梯形速度图,该运行速度模式较为常用。此图虽能够达到控制的基本要求,但也存在一些弊端:它会冲击提升系统的机械部分,打破提升机中钢丝绳的稳定状态,这也直接影响了提升机运行的稳定性。产生这些不足的原因在于如图3 所示的结果,转折处的速度转变较为直接、不平缓,转换速度也较快,如此加大了加速度的变化率。因此,根据以上不足之处,通过计算机软件使给定曲线S 化,得出S 形速度给定曲线。
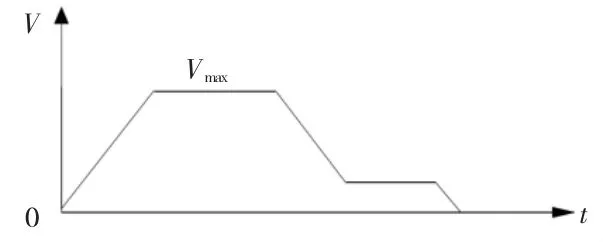
图3 梯形速度曲线图
理想的S 形给定出的曲线以及加减速度的变化率和形状如图4 所示,提升机以恒定最大的运行速度 Vmax常运行,该图中 Vmax、Vp和 rm分别为最大提升速度、爬行速度以及加速度变化率,且整个提升周期中包括的部分列于表1。该速度的计算依据是rm对时间的积分。
3 行程的控制策略
调速系统主要采用转速电流双闭环直流控制,在行程给定的条件下,通过一定的关系得出给定速度。速度调节器使用的是有关比例积分的PI 调节器,当采用抛物线函数给定速度时存在一些偏差;若采用斜坡函数给定速度时,稳态的误差基本为0。因此,系统可采用复合的控制方式处理误差,此种控制方式可使在相对恒定稳定状态的条件下,能够较大程度地减小速度的一些误差。针对复合的控制方式,可在反馈系统中加上类似前馈的校正环节,这种模式主要是基于在速度给定的条件下,对相关的动力矩输入信号进行求导得出导数前馈方面的控制,即控制形式为结合前馈控制和反馈控制[4]。
这种复合控制形式优势众多:首先,整体提高了系统的抗扰性和跟随性;其次,优化了拖动系统速度误差和跟随误差,跟随误差主要是由于静阻转矩所引起的。此外,可以避免提升容器的下沉。
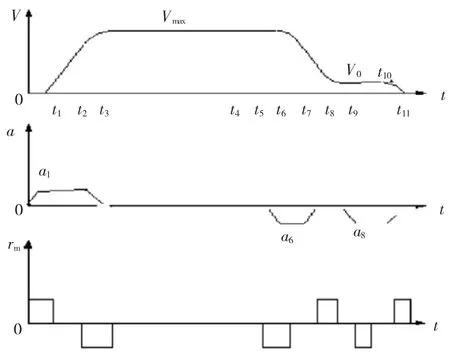
图4 理想的S 形给定曲线图
4 结论
行程控制的本质为位置控制,即在给定的行程中,以提升机的行程为根据确定给定速度的信号大小。基于速度信号,将给定信号转化为相应的电位信号;建立了S 形曲线数学模型,取代了常用的梯形速度图,可对折线处速度进行平滑过渡;最终采用复合形式的行程控制策略,不仅可消除误差,还可提升提升机整体的安全性。
