基于自适应模糊推理的VAV系统变静压控制方法研究*
2021-04-08西安建筑科技大学余紫瑞于军琪赵安军叶子雁李若琳
西安建筑科技大学 余紫瑞 于军琪 赵安军 叶子雁 李若琳
0 引言
VAV系统因其能够随着负荷的变化而改变送风量的特点,在降低风机能耗方面具有很大的优势。VAV系统定静压控制法在实际应用中送风静压通常保持在较高水平,导致风机能耗增大,而变静压控制法能够依据负荷的变化对送风量进行调节,进而减少风机能耗。Shim等人通过模拟实验对不同的送风机控制方法进行了对比,结果表明,变静压控制法可以节能50%[1]。虽然变静压控制法有巨大的节能潜力,但其控制算法也更加复杂。对于变静压控制的研究,很多学者都集中在优化静压控制上[2-3]。Liu等人提出了一种基于送风量测量值与送风量额定值之比的静压控制方法[4];陈友明等人根据总风量与总需求风量的偏差及末端风阀全开的数量以固定步长优化静压设定值,提出了VAV空调系统自适应静压变频控制方法[5]。这些方法都需要通过测量装置进行精确的测量,会增加系统调试的复杂性和实际工程的运营成本。
VAV系统因系统的复杂性很难获得精确的数学模型来达到理想的控制效果,而模糊控制不需要对控制对象建立精确的数学模型,近年来在VAV控制领域得到了广泛应用。对于VAV系统变静压模糊控制,已有学者进行了研究。Zhang等人通过建立静压设定值调整量与变风量末端风阀开度之间的关系实现变静压模糊控制,试验分析表明,该方法有较大的节能潜力[6]。Li等人提出了一种新的静压模糊控制方法,该方法基于最大阀位位置反馈Mamdani模型模糊控制规则和功能模糊子集推理来实现静压控制,试验结果表明该方法具有较好的节能和控制性能[7]。范朋丹等人通过分析基于末端阀位的VAV空调系统变静压调控规则,提出了基于末端阀位反馈的变静压模糊控制方法,通过对比试验验证了该方法的有效性[8]。
上述方法中的变静压模糊控制均以阀位为参考对象,都是通过模糊推理实现变静压控制,其中的模糊控制规则均依赖人为经验。模糊推理是模糊控制过程中最重要的部分,规则的好坏会直接反映到控制效果中,然而根据人为经验总结的模糊规则覆盖率不够全面,不能完全体现控制对象的性质。针对这一问题,本文提出了一种基于减聚类-自适应神经模糊推理(SC-ANFIS)的变静压模糊控制法,通过对大量已知数据进行学习得到模糊规则,而不是基于经验给定,这对于变风量空调这种非线性、大滞后、强耦合的系统是尤为重要的。
1 变静压控制法原理
典型的多区域VAV系统控制原理如图1所示。该系统主要由空气处理机组、送风机、静压传感器、VAV末端、风管等组成[8]。变静压控制是根据各末端风阀阀位判断系统风量的盈亏,以此为主风管静压的确定依据,使系统中至少有一个VAV末端风阀尽可能保持全开,从而实现最小阻力控制。变静压控制与定静压控制的主要区别为系统送风静压值在运行过程中是否会发生变化。
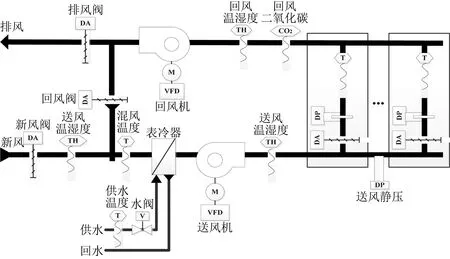
注:T为温度传感器;DP为静压传感器;TH为温湿度传感器;V为水阀执行器;DA为风阀执行器;M为电动机;VFD为风机变频器;CO2为二氧化碳传感器。图1 典型的多区域VAV系统控制原理图
传统的变静压控制在调整静压设定值的过程中步长为定值,但很难确定合适的步长:步长过小,调整次数会增加;步长过大,可能会出现超调和振荡。因此,若能根据末端的阀位信息确定适合的设定静压调整值,变静压法运行会更加节能。根据ASHRAE应用手册2011[9],送风静压传感器位于主管道上第一末端到最远末端距离的75%处。送风机转速可以根据实际静压测量值与送风静压设定值之间的偏差进行调节,以保持送风静压在其设定值。
为了避免送风静压值过高,风机压头过多地消耗在阀门开度较小的末端,导致送风机需较大的动力,进而产生较大能耗,静压设定值的确定需要符合以下两点要求:
1) 静压设定值能够满足系统中所有末端的风量需求。
2) 在满足各个末端风量需求的前提下静压设定值越小越好。尽可能使各个末端阀门保持在较大开度,这样既能减小风机的动力,同时又可以降低末端阀门的噪声。
在研究变风量空调系统变静压控制中,文献[7]提出的静压模糊控制法的控制对象为末端风阀,与本文相同。因此,结合变静压控制的基本原理及静压设定值的设定要求,本文将最佳阀位域[0.75,0.95]作为静压调整的参考域,最佳阀位值取参考阀位域的中心值0.85[7]。
2 模型建立
2.1 数据的来源和采集
采用的数据均来自于西安建筑科技大学某办公区域的变风量空调系统实验平台,该系统的结构如图2所示[10]。

注:S为水流开关;W为风速传感器;F为水流量传感器;AF为压差传感器;E为智能电量变送器;P为静压传感器。图2 变风量空调系统结构
本文以A1~A3 3个相邻房间为对象研究变风量空调变静压控制方法。该研究区域内的主要设备包括送风管网A、空气处理机组AHU A、VAV末端、温湿度传感器及静压传感器。VAV末端采用压力无关型单风道末端;送风机为变频送风机。表1给出了变风量空调风系统主要设备参数。

表1 变风量空调风系统主要设备参数
变静压模糊控制法主要利用末端阀位与静压设定值之间的关系实现风机控制。因此本文采用的数据包括A1~A3 3个房间的末端阀位值及送风管道A的静压值。在夏季工况中,以30 min的采样时间间隔采集6—8月工作时间08:00—18:00的数据,共1 840组。为了建立准确的模型,需要对这1 840组数据进行选择和处理。首先,筛选出稳定工况下满足当前负荷条件的数据,并尽可能选择连续分布在整个运行区间的数据,经筛选后得到1 000组数据;其次,以静压设定值的设定要求为选择条件,直接获取输入的阀位值,从输出静压增量数据中直接获取至少一个满足最佳阀位[0.75,0.95]的数据,将不在目标阀位的输出静压增量值设定为静压最大增量值;最终,经过选择,整理得到共1 000组数据用来进行模型的训练和验证,其中,600组作为训练数据用来建模,400组作为验证数据用来检验模型。
2.2 基于SC-ANFIS模型的变静压模糊控制
对筛选后的输入、输出数据进行训练,生成能够模拟数据行为的Takigi-Sugeno型模糊推理系统,该系统能够使用最少的模糊规则来最好地模拟这些数据。根据VAV系统变静压控制原理设计ANFIS系统,其典型结构如图3所示[11-12]。

注:TT为隶属度值乘以触发强度值;N为归一化处理;f1、f2为归一化处理后的输出;y为去模糊化后得到的系统输出。图3 ANFIS系统典型结构
第1层:用于模糊化输入变量,计算各输入分量属于各语言变量值模糊集和的隶属度函数值。
Oi1=μAi(x1) (i=1,2)
(1)
Oj1=μBj(x2) (j=1,2)
(2)
式(1)、(2)中Oi1和Oj1为节点输出;μ为模糊变量Ai和Bj的隶属度函数值;x1和x2为ANFIS系统的节点输入,分别为阀位最大值和阀位最小值。
模糊化函数选择高斯函数:

式(3)、(4)中ci、cj和σi、σj分别为ANFIS的前件参数。
第2层:用来匹配模糊规则的前件,计算各条规则的适应度ωi。
Oi2=ωi=μAi(x1)μBi(x2) (i=1,2)
(5)
式中Oi2为每条模糊规则的适应度值。
第3层:进行各条规则适用度的归一化计算。
(6)
式中Oi3为每条模糊规则适应度值归一化后的值。
第4层:用于计算各条规则的输出。
(7)
式中Oi4为每条模糊规则计算得到的节点输出;pi、qi和ri为ANFIS的后件参数;fi为Takigi-Sugeno型模糊系统的后项输出函数。
第5层:去模糊化,得到系统的总输出。
(8)
式中Oi5为每条模糊规则计算得到的输出去模糊化后得到的系统输出。
文中的输入x的具体取值可以用减聚类确定,减聚类是一种用来估计一组数据中的聚类个数及聚类中心位置的快速单次算法[13-14]。每个数据点xi的密度指标Di可以表示为
(9)
其密度修正公式为

(10)
式(8)、(9)中D′i为修正后的密度指标;xc1为选中的点;Dc1为选中点的密度指标;ra为数据点的区域半径,定义了其密度范围。
本文采用最小二乘法和BP反向传播算法的混合学习算法调整后件参数,迭代计算输出层的误差信号,根据误差反向传播算法计算前件参数,调整可修改的参数,使得系统能够很好地模拟给定的样本数据。
为了实现基于SC-ANFIS的变静压模糊控制,根据以上算法设计ANFIS系统:输入层变量为2个,分别为阀位最大值和阀位最小值;语言值个数为7,即{NB,NM,NS,ZO,PS,PM,PB};隶属度函数选择高斯函数;输出层输出变量个数为1,即静压增量。仿真试验具体设计步骤如下。
步骤1:载入筛选得到的用于训练的600组末端阀位值及静压设定值。
步骤2:采用减聚类进行样本数据模糊聚类分析,从而确定模糊量化参数,构造初始模糊推理系统结构。本文减聚类算法设置数据影响区域半径为0.15 Pa。通过聚类分析得到的聚类中心有107处,将其作为ANFIS系统的初始输入数据。图4a、b分别为最大阀位的初始化输入隶属度函数图及经减聚类算法训练后的输入隶属度函数图,由其可知,通过数据训练之后,隶属函数的形状发生了变化,说明初始选取的隶属函数参数可通过数据的自学习来改变,达到修正的目的。

步骤3:确定训练选项值。采用BP算法和最小二乘法混合学习算法优化训练ANFIS的参数,设定训练迭代次数(100次)和误差限(1%)。
步骤4:开始训练,直至满足误差要求或者达到最大迭代次数。
步骤5:将优化训练好的ANFIS模型应用于实验平台变静压模糊控制系统,观察分析结果。
3 实验分析
3.1 相关参数
整个系统建筑平面面积为1 200 m2,窗墙面积比为0.7;围护结构传热系数3 W/(m2·℃);照明设备负荷、人员密度及设备负荷均依据GB 50189—2019《公共建筑节能设计标准》确定。空调区域的设定参数如表2所示。

表2 空调区域设定参数
对定静压控制、人为经验变静压模糊控制[15]、SC-ANFIS变静压模糊控制3种方法进行对比,表3列出了3种方法的相关参数。文献[15]中变静压模糊控制法根据经验用少数的规则来包含多种组合方式,以3个房间为研究对象,根据变风量空调系统“当至少有一个末端阀门全开时,需要增大系统静压值”“当全部末端开度都较小时,需要减小系统静压值”等实际运行经验,得到一个三区域VAV系统的变静压模糊控制规则。

表3 实验相关参数
表3中,根据系统实验调试定静压控制法的静压设定值为350 Pa。静压变换系数与静压增量模糊论域[-1,1]相乘代表静压模糊增量实际变化阀位,即本文静压增量实际变化范围为[-5,5]。文中实验只考虑夏季工况,且考虑该系统为低温送风系统,本文设定送风温度为16 ℃。
3.2 结果分析
3.2.1房间温度变化
选取平均偏差和均方差作为室温整体控制效果的指标。平均偏差是用来测定数列中各数据对其平均数离势程度的一种尺度,如式(11)所示;均方差是用来定义一组数据内个体间的离散程度,如式(12)所示。
(11)
(12)
图5显示了3种方法对应的各房间温度变化。表4列出了温度的平均偏差均值及均方差均值,其大小反映了不同方法对房间温度的整体控制效果。


表4 不同方法下房间温度平均偏差及均方差均值 ℃
由图5和表4可知:当房间温度设定值均为26 ℃时,这3种方法均能够实现室温的稳定控制。从平均偏差均值来看,定静压控制法较其他2种方法略小,2种变静压模糊控制法误差相当。说明2种变静压模糊控制法效果基本相同,而定静压较这2种方法的效果略好一些。由图5也可看出,定静压室温控制达到稳定的时间更短一些,这是因为定静压设定值一直处于较大值,虽然房间内的降温速度能够得到保证,但由于送风温度固定不变,室温控制达到稳态时,风量需求减小,而静压不变,只能调节末端阀位,从而导致更多的能量消耗在风阀节流部分。而从统计方差均值来看,SC-ANFIS变静压模糊控制法的平均值更小一些,说明其控制室温时误差的波动较小,避免了风量大范围调整,较为稳定。整体来说,SC-ANFIS变静压模糊控制法能够在达到室温控制效果的同时保证整体的舒适度。
3.2.2末端阀门开度变化
图6显示了3种方法对应的各个末端阀门的开度变化。由图6可知,风阀开度影响送风系统风机能耗。本文以最佳阀位域[0.75,0.95]为参考对象,尽可能使风阀处于最佳阀位域,从而达到节能效果。

由图6还可知,除初始阶段外,2种变静压模糊控制法的各个末端阀门的开度较定静压控制法大,但随着系统静压调整变化,阀门也会随之调节。在稳定阶段,定静压控制法最大阀位为0.32,3个末端阀位均处于偏小状态,导致静压损失大,风机能耗偏高,相应地还带来了噪声问题。对于2种变静压模糊控制法,经验变静压模糊控制法最大阀位为0.97,SC-ANFIS变静压模糊控制法最大阀位为0.87,SC-ANFIS变静压模糊控制法最大阀位处于本文参考的最佳阀位域中,并且更加接近最佳阀位值0.85。因经验变静压模糊控制法中模糊规则的覆盖性不够全,导致阀位调节时间过长,SC-ANFIS变静压模糊控制较经验变静压模糊控制的调节时间缩短35%。并且,由图6也可以看出,SC-ANFIS变静压模糊控制法调节过程更加稳定,不会导致阀位在调节过程大幅度变化,损耗末端阀门使用寿命。整体来说,SC-ANFIS变静压模糊控制法不仅能够使得阀位达到最佳值,而且能使阀位的调节频率降低,延长了阀门的使用寿命。
3.2.3系统静压设定值
图7显示了3种方法的静压设定值变化。系统静压值为风机转速的控制参数,影响着系统运行能耗。定静压控制中静压设定值为定值,因此,根据式(11)、(12),表5给出了2种不同变静压模糊控制法静压设定值的平均偏差,反映了静压控制的效果。

图7 3种方法的静压设定值变化

表5 不同变静压模糊控制法的静压设定值平均偏差 Pa
由图7可知:定静压控制法始终维持350 Pa的设定值;对于2种变静压模糊控制法,在初始阶段,各个末端对风量需求较大,因此末端阀位值较大,同时静压设定值也逐步增大,使温度能够快速降到设定值。由表5可以看出,SC-ANFIS变静压模糊控制法静压设定值的平均值及平均偏差均比经验变静压模糊控制法略小一些,2种模糊控制法的控制效果基本相同,且在稳定阶段,2种变静压模糊控制法风机静压值降低并稳定在85 Pa左右,在满足当前负荷条件下,能够使静压设定值较小,从而达到节能的目的。而定静压控制法,在稳定阶段依靠减小末端风阀开度降低风量,风阀会产生较大的风压损失,从而产生较大能耗。虽然2种模糊控制法稳定阶段静压设定值基本相等,但是经验模糊控制法在静压设定值调整过程中出现了间断点,而SC-ANFIS变静压模糊控制法调整过程更加平稳一些。经验变静压模糊控制法的模糊规则都是根据人为经验得到,而人为经验总结通常只对主要的特征工况进行总结,在多维输入情况下,人为经验规则很难覆盖所有输入组合情况,从而导致模糊输出在2个规则的结合部位出现间断点。通过SC-ANFIS优化训练出的模糊规则及隶属度函数的设置可以包含整个输入情况,能够稳定调整静压设定值,从而增加了系统控制的稳定性。
3.2.4送风机能耗
根据风机静压及风机送风量计算风机功率,并对比3种控制方法的能耗。图8显示了3种控制方法的风机功率变化。表6给出了3种控制方法的送风机平均功率及总电耗。

图8 不同控制方法风机功率变化

表6 3种控制方法送风机总电耗
由图8和表6可知:在初始阶段,因末端风量需求较大,3种方法的功率均偏高;在稳定阶段,定静压控制法的功率为2.473 kW,经验变静压模糊控制法的功率为0.863 kW,SC-ANFIS变静压模糊控制法的功率为0.802 kW。定静压控制法因其静压值偏高且末端阀位均处于较小值,能量都消耗在风阀节流上,导致整体能耗偏大。虽然2种变静压模糊控制法的功率基本相同,但是SC-ANFIS变静压模糊控制法的平均功率较经验模糊控制法低,原因是经验变静压模糊控制调节时间较长且调节幅度偏大,导致能耗过多。SC-ANFIS变静压模糊控制风机总电耗较经验变静压模糊控制低7%,较定静压控制低67%。整体来说,SC-ANFIS变静压模糊控制法对于风机控制具有一定的节能效果。
3.2.5抗干扰性分析
图9和图10显示了房间负荷增大时室温和风阀阀位的变化。

由图9可知,当负荷增大时,经验变静压模糊控制的温度变化幅度较大,房间A2的最高温度为28.3 ℃,比设定温度高2.3 ℃,而SC-ANFIS变静压模糊控制的温度变化较为稳定,响应时间较快,房间A2的最高温度为27.3 ℃,比设定温度高1.3 ℃。

由图10可知,经验变静压模糊控制在负荷变化时,阀位调节幅度较大,房间1调节过程中最大阀位为0.65,较稳定时的阀位0.48高0.17,而SC-ANFIS变静压模糊控制在负荷变化时能够快速稳定地调节阀位,房间A1调节过程中最大阀位为0.50,较稳定时的阀位0.48高0.02。通过以上分析可知,当室内负荷发生变化时,SC-ANFIS变静压模糊控制末端阀位调节幅度很小,能够快速稳定地进行调节,室温变化较为稳定。因此,对比经验变静压模糊控制,其抗干扰性更强。
4 结语
本文将SC-ANFIS用于变风量空调系统中,提出了基于SC-ANFIS的变静压模糊控制法。对比经验变静压模糊控制,该方法能够快速稳定地达到室温控制效果,并且整个系统的调节时间更短,控制过程更加稳定;当存在一定干扰时,能够更加稳定地完成控制过程,具有一定的抗干扰性。在风机能耗方面,SC-ANFIS变静压模糊控制法对比经验变静压模糊控制法和定静压控制法分别减小了7%和67%,具有一定的节能效果。同时,在一定程度上解决了人为调试获取规则困难的问题。对于VAV系统变静压控制节能研究,也可以采用智能算法进行优化控制,这也是未来可以继续进行探索的方面。
