天波雷达对空探测任务下积累时间自适应优化设置研究
2021-04-07王国师张朝伟花良发
王国师, 韩 伟, 张朝伟, 花良发
(空军预警学院雷达士官学校, 湖北 武汉 430345)
0 引 言
天波超视距雷达(以下简称天波雷达)工作波长长,采用占空比约为100%的连续波,比脉冲波更能经济有效地产生雷达所需要的高平均功率[1]。天波雷达通过电离层折射来探测目标,与常规雷达相比,具有探测距离远、覆盖区域广、能够同时探测空中目标和海面目标等优势[2-3]。天波雷达的工作方式为:探测波束在不同波位进行分时扫描,雷达在每个波位上进行一定时间驻留,以完成目标的频域检测[3]。这种工作方式决定了天波雷达的资源是有限的,必须科学合理地分配资源,才能充分发挥天波雷达的探测性能。天波雷达资源调度涉及探测子区划分、参数优化设置、波位选择、波位扫描方式等方面的内容。目前,针对天波雷达资源调度的研究较少,文献[4-5]分别从装备资源调度和探测子区划分的角度研究天波雷达的资源调度问题,未考虑参数优化设置、波位选择等问题。而参数优化设置是天波雷达资源调度的一个重要方面,本文主要对该问题进行研究。
根据工作方式可知,天波雷达参数优化设置的主要对象是相干积累时间。为提高雷达目标信噪比和多普勒分辨率,通常采用长相干积累技术,但长相干积累技术是以降低雷达数据率为代价[3]。可见,积累时间对天波雷达探测性能的影响是双重的[6]。因此,选择合适的相干积累时间是充分发挥天波雷达探测性能的重要保证。传统方法主要是操作人员根据经验来调整积累时间,这种人工操作具有一定的盲目性,无法充分发挥装备探测性能。因此,需要研究积累时间的自适应优化设置方法。一些学者对常规相控阵雷达的参数设置问题开展了深入研究[7-15],但天波雷达的探测任务和工作方式有其特殊性,无法直接应用天波雷达参数优化方法,需要改进或重新设计。
基于此,本文以空中目标为研究对象。首先,分析积累时间对目标信噪比和航迹关联的影响;其次,从距离覆盖、速度模糊、航迹关联等方面综合考虑,计算影响相干积累时间的信号时宽和积累点数的最优值;然后,结合天波雷达工作实际现状,提出了积累时间设置优化方法;最后,通过实验数据分析,证明了本文所提方法比传统的人工方法能够提高目标的检测性能。
1 积累时间对雷达探测性能的影响
1.1 对检测目标信噪比的影响
天波雷达在外噪声背景下检测空中目标的信噪比[16]公式为
(1)
式中,S/N为信号噪声功率比;Pav为发射平均功率;Gt为发射天线增益;Gr为接收天线增益;σt为目标的雷达散射截面积;λ为工作波长;Tc为相干积累时间;Ls为雷达系统损耗;Lp(t)为电离层损耗,其值随时间t变化;Rp为射线距离;Pn(t)为每赫兹带宽中的外部噪声功率,其值随时间t变化,表达式为Pn=kT0fa(t),k=1.38×10-23J/K,T0=288 K,fa(t)为外部噪声功率谱密度。
由式(1)可知,积累时间与目标信噪比成正比,即积累时间越长,目标信噪比越大,越容易被检测到。
1.2 对航迹关联的影响
天波雷达的探测区域被划分为若干个探测子区[3](见图1)。雷达工作时,根据作战任务要求选择部分子区进行探测,这些选定的子区称为探测波位。天波雷达通常是按照选定探测波位的时间先后顺序进行波位扫描。当雷达波束扫描到某个探测波位时,通过对回波脉冲串进行相干积累来完成目标检测。

图1 探测子区和探测波位示意图
定义 1波位重访时间T是指雷达连续两次扫描到同一波位的时间间隔。
对信号处理送来的点迹,必须进行航迹相关后才能形成航迹。天波雷达的航迹相关算法如图2所示,距离和方位以单元为单位,如果上一帧的点迹位于阴影空间单元内,则当前帧的点迹只要出现在虚线框的9个空间单元内,则认为该点与上一点相关,做航迹相关处理。即:目标连续两点之间的距离不超过距离检测门限和方位检测门限时,航迹才能相关;否则,航迹断续。距离检测门限ΔRL=c/(2B),其中,c为光速,B为雷达工作带宽;方位检测门限为ΔRA=ΔθRt,其中,Δθ为波束宽度,Rt为目标与雷达的距离[6]。从航迹关联的角度看,积累时间越长,波位重访时间T就越大。当波位重访时间T太大时,目标在重访时间T内的移动距离就有可能超过距离检测门限或方位检测门限,则无法与已有航迹关联,从而导致航迹断续。综上所述,从航迹关联看所得出的结论与从信噪比角度看所得出的结论相矛盾。因此,天波雷达相干积累时间设置既不能过大也不能过小,需要折中考虑。
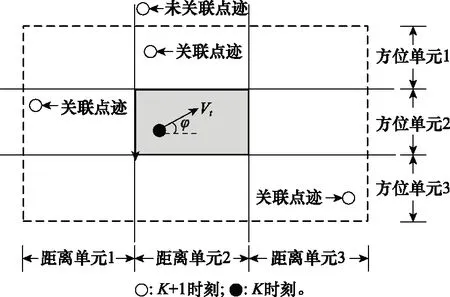
图2 航迹相关条件示意图
2 相干积累时间最优值计算
相干积累时间可表示为
Tc=N×Tp
(2)
式中,N为积累点数;Tp为发射信号时宽。
由式(2)可知,相干积累时间设置优化可以通过设置优化信号时宽或积累点数来实现。
2.1 信号时宽最优值
2.1.1 探测距离对信号时宽的限制
当电磁波速度为c,信号时宽为Tp时,根据雷达测距原理[3],则天波雷达最大不模糊探测距离Romax为
(3)
由式(3)可知,为了不发生距离模糊,Romax不能小于目标的最大探测距离Rtmax,则信号时宽必须满足如下条件:
(4)
由式(3)和式(4)可知,信号时宽越大,雷达的不模糊距离也越大,具备探测更远目标的能力。但是过大的信号时宽会产生速度模糊(或多普勒模糊)现象[3]。
2.1.2 目标速度对信号时宽的限制
由于天波雷达采用的是占空比约为100%的连续波,发射信号时宽即为发射信号重复周期。因此,发射重复频率fr为发射信号时宽的倒数:
(5)
目标信号的多普勒频移[17]可表示为
(6)
式中,Vr为目标相对雷达的径向速度,Vr=Vtcosφ。
径向速度不模糊的条件为
(7)
由式(6)和式(7)可以得出
(8)
由式(4)和式(8)可知
(9)
由上述分析可知:如果选择的时宽过小,会造成雷达探测的距离模糊,造成远距离无法覆盖,达不到探测目的。相反,如果选择的时宽过大,则会造成雷达探测的速度模糊。因此,时宽选择需要满足式(9)。
2.2 积累点数最优值
为了便于讨论,作如下假设:雷达探测波位个数为NR;第i个波位对应的信号时宽为Tpi;第i个波位对应的积累点数表示为Ni;第i个波位的相干积累时间表示为Tci;目标做匀速运动,速度为Vt,速度与距离维度的方向(雷达视线)的夹角为φ(范围为0~π/2),如图2所示。
积累点数受雷达工作方式(搜索、驻留、边跟踪边搜索)的影响。下面分别讨论不同工作方式下的积累点数设置优化问题。
2.2.1 搜索时的积累点数最优值计算
搜索工作方式下设置多个探测波位,主要用于探测非重点区域或非重要威胁目标的区域。波位扫描所采用的调度策略是:按照先近后远、先北后南逐个顺序扫描[18]。
根据定义1,搜索工作方式下各波位重访时间相等(用T表示),为所有探测波位的相干积累时间之和:
(10)
积累点数的设置必须满足航迹关联条件,即波位重访时间内目标在距离维度上的移动距离应小于1个距离单元且在方位维度上的移动距离应小于1个方位单元,可用下列式子表示:
(11)
搜索工作方式下,由于任务重要性都相同,各波位可设置相同的积累点数(用N表示),则式(11)可变换为
(12)
则
(13)
因此,积累点数设置的最优值应该为
(14)
特别地,当各波位都设置相同的信号时宽(用Tp表示)时,则式(11)可变换为
(15)
此时,积累点数设置的最优值应该为
(16)
式中,方括号表示取其整数部分。
2.2.2 驻留时的积累点数最优值计算
驻留监视工作方式只设一个工作波位,驻留监视工作方式以最小的覆盖范围为代价,换取了最短的波位重访时间,从而获得最佳的探测性能,主要用于明确任务背景和具有先验信息场景下,对重点区域或重要威胁目标进行连续不间断地监视和跟踪。
驻留时只有一个波位,即NR=1。为了能够使航迹关联,则积累点数选择应满足:
(17)
则
(18)
因此,积累点数设置的最优值应该为
(19)
式中,方括号表示取其整数部分。
2.2.3 边跟踪边搜索时的积累点数设置优化
边跟踪边搜索工作方式设置多个探测波位,是在对部分区域正常搜索的同时,对其中一个或多个指定的重点关注波位进行跟踪探测,主要用于具有一定监视范围的场景下对重点目标的跟踪。
边跟踪边搜索工作方式的波位扫描调度策略是[18]:搜索波位按先近后远,先北后南的准则进行,但是每扫描一个搜索波位之后,都要进行一次所有跟踪波位的扫描。例如:假设共有5个探测波位,其中,搜索波位按扫描顺序为1,2,3,跟踪波位按扫描顺序为4,5,则所有波位扫描顺序为:1,4,5,2,4,5,3,4,5,…。
一般情况下,各跟踪波位的积累点数相同,各搜索波位积累点数相同,但跟踪波位积累点数与搜索波位积累点数不同。假设:雷达探测波位个数为NR;搜索波位个数为M;第i个搜索波位对应的信号时宽为TpSi;各搜索波位对应的积累点数表示为NS;第i个搜索波位对应的积累时间表示为TcSi;第i个跟踪位对应的信号时宽为TpTi;各跟踪波位的积累点数表示为NT;第i个跟踪波位对应的积累时间表示为TcTi;其他参数与前文表示相同。
根据定义1,边跟踪边搜索工作方式下第i个跟踪波位的重访时间(用TGi表示)为所有跟踪波位积累时间之和再加上1个搜索波位积累时间(用TcS表示)。
(20)
为了能够使航迹关联,则积累点数选择应满足:
(21)
根据定义1,边跟踪边搜索工作方式下各搜索波位的重访时间(用T表示)可表示为
(22)
为了能够使航迹关联,则积累点数选择应满足:
(23)
从上述分析可知,边跟踪边搜索工作方式下使得航迹关联,波位重访时间受到限制,从而使得搜索波位积累点数与跟踪波位积累点数相互制约,当一个取值较大时,另一个必须取值较小。边跟踪边搜索工作方式下积累点数的设置必须满足两个原则:一是必须同时满足式(21)和式(23);二是在搜索波位的积累点数能够满足式(1)能量要求的条件下,尽量增大跟踪波位的积累点数,以确保跟踪波位的航迹质量。
2.3 积累时间最优值
假设天波雷达最小可检测信噪比表示为SNmin,由式(1)可知
(24)
由式(2)、式(24)可得出
Tc=NTp≥Ω0Lp(t)Pn(t)
(25)

由式(25)可以看出,电离层损耗Lp(t)和外部噪声功率Pn(t)的变化,迫使积累时间变化。因此,第2.1节讨论的信号时宽与第2.2节讨论的积累点数乘积也要满足式(25)。
3 积累时间自适应设置方法
由上述分析可知,相干积累时间设置是通过改变信号时宽或积累点数来实现的。具体方法是:先设置各波位的信号时宽,再设置各波位的积累点数。
3.1 信号时宽自适应设置
信号时宽的大小应满足式(9)。式(9)中,Rtmax、c、λ都是已知量,Vr随时间变化,雷达通过测量多普勒频移也可以测出Vr,并在数据库中记录了各波位所探测历史目标的最大Vt。信号时宽自适应设置方法如下:
(1)根据雷达工作方式,从数据库中读取各波位历史目标的最大Vt(或通过其他方式获知目标的最大Vt)作为Vr;
(2)根据当前波位的Rtmax、c、λ值,利用式(9)计算信号时宽的范围;
(3)取上述计算范围内的最小值作为信号时宽的设置值,目的是在满足距离覆盖要求的前提下应尽量小,以获得更大的不模糊多普勒容限。
3.2 积累点数自适应设置
3.2.1 搜索时的积累点数最优值计算
搜索工作方式下积累点数应满足式(14)。式(14)中,ΔRL、ΔRA、NR、Tpi都是已知量,Vt随时间变化,雷达通过测量多普勒频移也可以测出Vr,φ值通过目标历史移动的轨迹进行推算。根据Vr和φ可以计算出Vt,并在数据库中记录了各波位所探测历史目标的最大Vt。搜索工作方式下积累点数自适应设置方法如下:
(1)设置初始值。根据各波位历史积累点数设置经验,选择典型值作为各波位的初始积累点数。
(2)选择Vt。从数据库中读取各波位历史目标的最大Vt(或通过其他方式获知目标的最大Vt)。
(3)确定积累点数。因为目标有可能相对雷达径向运动,也有可能相对雷达切向运动。因此,分别令φ=0和φ=π/2,利用式(14)计算积累点数,并取两者的最小值作为搜索波位的积累点数。
(4)用式(25)计算检验信号时宽与积累点数的乘积是否满足信噪比要求。若满足,则参数设置正确;若不满足,删减工作波位后重新计算信号时宽与积累点数,直至满足式(25)的要求。
3.2.2 驻留时的积累点数最优值计算
驻留工作方式下积累点数应满足式(19)。跟踪时积累点数自适应设置方法是搜索时的特例,设置方法描述如下:
(1)设置初始值。根据该波位历史积累点数设置经验,选择典型值作为该波位的初始积累点数。
(2)当采用驻留时,一般是天波雷达已经探测到目标,并且认定该目标非常重要,应集中资源保障这个目标。根据波位的ΔRL、ΔRA、NR、Tpi值,以及波位探测目标的Vt、φ值(如果探测区域中设置了重点目标,则选重点目标的Vt、φ值),利用式(19)计算波位积累点数的范围。
(3)取上述计算的积累点数的范围内的最大值作为积累点数的设置值。
(4)用式(25)计算检验信号时宽与积累点数的乘积是否满足信噪比要求。若满足,则参数设置正确;若不满足,删减工作波位后重新计算信号时宽与积累点数,直至满足式(25)的要求。
3.2.3 边跟踪边搜索时的积累点数设置优化
边跟踪边搜索时工作方式下积累点数应同时满足式(21)和式(23)。边跟踪边搜索时积累点数自适应设置方法如下:
(1)设置初始值。根据各波位历史积累点数设置经验,选择典型值作为各波位的初始积累点数。
(2)搜索波位积累点数的限制。从数据库中读取各波位历史目标的最大Vt(或通过其他方式获知目标的最大Vt)。因为目标有可能相对雷达径向运动,也有可能相对雷达切向运动。因此,分别令φ=0和φ=π/2,利用式(21)和式(23)计算搜索波位和跟踪积累点数的约束关系式。
(3)跟踪波位积累点数的限制。根据波位的ΔRL、ΔRA、NR、Tpi值,以及波位探测目标的Vt、φ值(如果探测区域中设置了重点目标,则选重点目标的Vt、φ值),利用式(21)和式(23)计算搜索波位和跟踪积累点数的约束关系式。
(4)确定积累点数。搜索波位的积累点数选择能够满足式(25)的最小值;跟踪波位的积累点数选择满足上述计算结果的最大值,并用式(25)计算检验信号时宽与积累点数的乘积是否满足信噪比要求。若满足,则参数设置正确;若不满足,删减搜索工作波位后重新计算信号时宽与积累点数,直至满足式(25)的要求。
4 实验分析
在电离层、噪声等其他外部条件以及波位数、各波位探测距离分别相同的情况下,分别采用本文提出的自适应积累时间设置优化方法和采用经验丰富的操作员人工设置积累时间的方法,对制作好的50批想定目标(共2 500个点迹)进行探测,并对探测结果进行了对比分析,探测结果如表1所示,表中漏点率是漏点数/总点迹数。

表1 探测结果对比
从表1可以看出:采用本文方法设置积累时间与采用人工方法设置积累时间相比,在搜索工作方式下,漏点率降低了0.7%,信噪比均值提高了0.56 dB;在跟踪工作方式下,漏点率降低了1.76%,信噪比均值提高了1.86 dB,效果显著;在边跟踪边搜索工作方式下,搜索波位漏点率降低了0.68%,信噪比均值提高了0.51 dB,跟踪波位漏点率降低了1.48%,信噪比均值提高了1.16 dB。
从上述实验分析看,无论天波雷达工作在何种方式(搜索、驻留、边跟踪边搜索)下,使用本文设置积累时间的方法都能够降低漏点率、提高信噪比,特别是对跟踪波位效果的提升更加明显。
5 结 论
本文在分析相干积累时间对天波雷达探测性能影响的基础上,计算了影响相干积累时间的信号时宽和积累点数的最优值,设计了自适应设置积累点数的方法。通过实验证明:本文方法与人工方法相比,能够减少检测目标的漏点数,提高检测目标的信噪比,特别是对跟踪波位效果的提升更加明显,更能充分发挥天波超视距雷达的探测性能。