基于LQR控制的现代客车自适应空气悬架
2021-04-07王旭
王旭
基于LQR控制的现代客车自适应空气悬架
王旭
(扬州亚星客车股份有限公司,江苏 扬州 225116)
长期在不良工况的道路上驾驶会降低驾驶员的乘坐舒适性。随着人们对乘坐舒适性需求不断提升,空气弹簧的优势尤为明显。文章提出了一种基于LQR控制策略的自适应空气悬架系统的创新设计方案,提出的LQR控制器采用粒子群算法进行优化。以客车空气悬架为研究对象,采用MATLAB软件对空气悬架系统的被动和自适应动力学模型进行了设计和仿真。仿真结果表明,自适应空气悬架系统在保证车辆稳定性的同时,降低了车辆在随机道路上的最大位移幅值,从而提高了车辆的平顺性。
空气悬架;PID;PSO;自适应悬架;乘坐舒适性
1 引言
对驾驶舒适性需求的增加要求在汽车上使用主动悬架系统。一个好的悬架系统应该提供较低的悬架挠度传递率来处理和较低的振动传递率来获得更好的乘坐舒适性。
悬架行程是指簧载与非簧载质量之间的相对位移[1]。悬架系统基本上是一个非线性系统。为了便于分析,应考虑使用等效线性系统[2]。考虑到对性能的评估,可以用乘坐舒适度、舒适度等作为衡量指标,对于处理、悬架挠度、控制器约束信息应被考虑[3]。
为了减少长时间的低频振动,作者提出一种自适应悬架系统使用一种有效的控制策略来提供动态刚度。在考虑设计约束条件的基础上,提出了一种以永磁体和霍尔效应传感器为关键特征的自适应悬架系统的创新设计方案。
钢板弹簧或盘簧可以提供必要的悬架,并保证道路与车辆的接触,这是主要的功能。但是,当行驶在一条不规则的道路上时,它们无法调整自身的刚度来为乘客提供必要的乘坐舒适性。本文推导了考虑这些关键参数的空气弹簧刚度方程,从而保证了测量的准确性。为了得到准确的结果,将其作为Matlab仿真的输入。
LQR控制器以有效的权函数满足黎卡蒂方程。本文将粒子群优化和人工优化相结合,对LQR控制器进行优化,以获得有效的权重函数。在接下来的章节中,我们将评估一个四分之一的汽车模型的空气悬架系统在控制器的影响下的各种干扰的性能。

cs=悬架阻尼系数 cus=轮胎阻尼系数 ks=悬架刚度 kus=轮胎刚度 ms=簧载质量mus=簧载质量 xd=路面扰动 xus=簧载质量位移 xs=簧载质量位移
2 数学建模
考虑到汽车的总重量均匀分布在四个轮子上,本研究四分之一的汽车模型。在具有预览控制的二维模型中应用LQ调节器,可以提高平顺性和操控性[4]。如图1(a)所示,一个2自由度四分之一的汽车被建模为安装在弹簧和阻尼器(悬架系统)上的簧载质量,由安装在轮胎上的非簧载质量承载,以确保道路与车辆的接触。在图1(b)中,显示了一个自适应悬架系统,其中引入了一个控制器来控制空气弹簧的刚度和阻尼特性。
在评估之前,需要做一些必要的假设。忽略空气弹簧中的压力梯度和空气弹簧孔内的空气流动阻力。为便于分析,可以忽略俯仰和角色角度经验的系统。输入可以从两个来源体验到;道路起伏,乘客质量和车辆质量。假设系统只经历一个完全的纵向加速度。
2.1 系统描述
四分之一车型的簧载质量为221kg。空气弹簧的刚度与风箱内的气压成正比。因此,在静载和动载条件下,系统的压力是根据因载的位移来调整的。最初,系统的压力应该保持在工作压力。
系统可以表示为:


自适应空气弹簧由橡胶波纹管、开/关(电磁)阀、辅助储气罐和压缩机四部分组成。空气弹簧通过控制器控制的电磁阀连接到压缩机上。
2.2 非线性系统
填充可压缩流体(如空气)的纤维增强橡胶波纹管构成了系统的非线性。系统的性能可以由其体积、有效面积、波纹管内的压力、波纹管的高度和作用在波纹管上的质量来定义。温度和环境条件是其他影响因素。下面的温度假定是恒定的。
在开阀状态下,由压缩机进入空气弹簧的空气质量流量为:

忽略其他的摩擦特性。空气弹簧被认为是一个中空的圆柱形结构。
由状态方程和输出方程给出了观察输出的广义状态空间表示。状态空间方法的优点是,它可以分析不同的初始条件。状态和输出方程为:

式中:
x为状态向量(方程n×1的阶)
a是状态矩阵(n × n)
B是输入矩阵(n × p)
u是输入向量(q × 1)
C是输出矩阵(1 × n)
因此,为了有效地控制空气弹簧的刚度,需要有效和可靠的控制策略。
3 控制器的影响
一个有效的控制系统可以用来提高任何系统的性能。提出了一种模糊控制器来控制阻尼器的输出值[5]。一个非线性系统被近似为一组线性子系统和相关的成员函数的总和。
本研究选择了一种适合车辆悬架实际应用的控制方法。为了处理系统的非线性和不均匀性,作者提出了一个等效线性系统,它是由非线性系统简化而来的,假设波纹管内的空气为理想气体。在MATLAB中对系统进行了仿真。为了进行比较研究,考虑了两种广泛使用的控制方法——PID和LQR。
3.1 PID控制器
比例积分微分控制器根据控制回路反馈原理工作。如图2所示,它有三个部分;比例部分通过减少当前误差来确保更好的性能,积分部分根据过去的误差来获得必要的性能,导数部分根据误差变化率来预测未来的输出。对于给定的输入,对象给出一个输出。对于动态系统,比例部分会产生稳态误差,因为增益是与误差成比例计算的。一旦误差变为零,控制器活动停止,这可能会由于缺乏控制而再次产生误差,称为稳态误差。
具有有效调节的PID参数的PID控制器被证明能显著降低车身加速度。另一方面,粒子群优化PID控制器是有效的,同时它为用户提供了简单性[6]。

图2 PID控制系统原理
在电子控制空气悬架系统的情况下,整个设置被视为弹簧和减震器的组合。研究表明,线性PID控制器在提供更好的平顺性和降低垂直加速度方面是有效的。
PID控制器的原理图如下图2所示。控制参数如下,其中u(t)是控制变量,K、K、K是比例、积分和微分增益,e(t)是获得的误差。通过改变比例增益、积分增益和微分增益,可以手动调节PID控制器的灵敏度。

3.2 LQR控制器
LQR控制器是一种全状态反馈控制器。LQR控制器通过用成本函数和适当的增益估计解决方案的有效性来消除或最小化误差,从而确保更好的系统性能。为了稳定系统,最好选择两个加权函数。一个加权函数通过状态向量改变状态来稳定系统,另一个加权函数通过控制向量惩罚控制信号。这两个加权函数都是标量正对称矩阵。
为了获得更好的控制,控制器的调整是不可避免的。在动态条件下,几乎不可能在每种情况下手动调节控制器。因此,需要一种方法来为每个实例调整系统。通过选择适当的加权函数来调节LQR控制器,该加权函数将提供最佳结果。

图3 代表各种局部最优解和全局最优解的粒子群算法图
粒子群优化是一种基于生物启发的种群优化技术。它致力于定义群中的维度搜索空间、步数和粒子(鸟)数。鸟的数量表示群体的大小。所有的鸟最终都朝着一个全局最优解的方向前进,为最优解作出贡献。
粒子群算法用于生成主动悬架系统的最优参数的帕累托解集。每个鸟的当前速度v和位置可以使用(6)来更新或测量,其中w是惯性因子,1和2分别是局部和全局最优的加权因子,pbest和gbest分别是当前粒子的局部最佳位置和当前粒子的全局最佳位置。

该过程一直持续到获得满意的结果。适应度函数由(7)给出。适应值和迭代次数决定了停止条件。评估每只鸟的局部最佳位置和全局最佳位置,另外,在考虑鸟的速度之后,获得新的最佳位置。
其中J是预测误差的均方根。
由于空气弹簧保持在关闭阀的状态,气室中的空气压力与空气弹簧悬挂系统的刚度成正比。与传统的悬挂系统相比,气动系统的可控性更简单,因为可变刚度可以通过改变容器内的气压来实现,因此,空气弹簧的选择将为我们提供有利的结果。
4 实验布置
为了检验上述提出和设计的控制器的性能,需要在类似条件下测试实际悬挂系统的实验。本次评估采用双盘旋空气悬架,因为系统的弹簧刚度主要由系统中的空气量控制。提高系统性能所需的控制器力是通过增加波纹管内的空气体积来实现的,以获得必要的刚度来避免不必要的振动。
在图4中可以看到实验设置的图示大多数传统使用的传感器无法在各种环境条件下工作。因此,为了检测波纹管高度的变化率,选择钕(钕铁硼)永磁体和霍尔效应传感器为控制器提供输入。

图4 实验装置的电路图
为了避免任何环境条件的影响,永磁体和霍尔效应传感器都计划安装在波纹管内。永久磁铁向内放置在波纹管和传感器的顶板上,放置在波纹管内的保险杠上。底板上的缓冲器用于风箱,以避免在最坏的情况下顶板和底板碰撞,这最终会破坏悬挂系统。
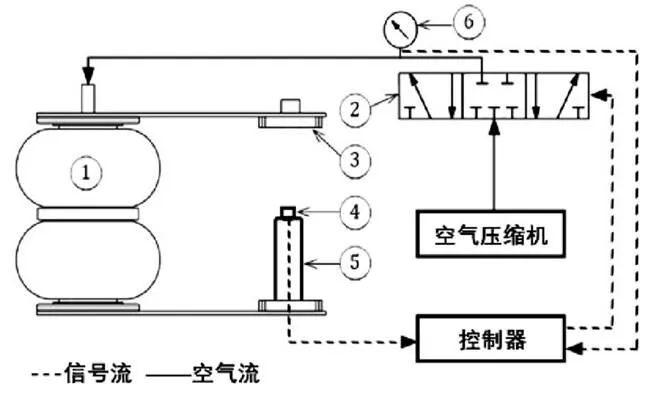
(1)风箱(2)气动电磁阀(3)永磁体(4)霍尔效应传感器(5)缓冲器(6)压力传感器
如图5所示,构建并测试了系统的原型。加速度计安装在振动台和簧上质量上,以测量在选定频率范围内获得的加速度。霍尔效应传感器放置在保险杠上,在感应永磁体的磁场方面非常有效。
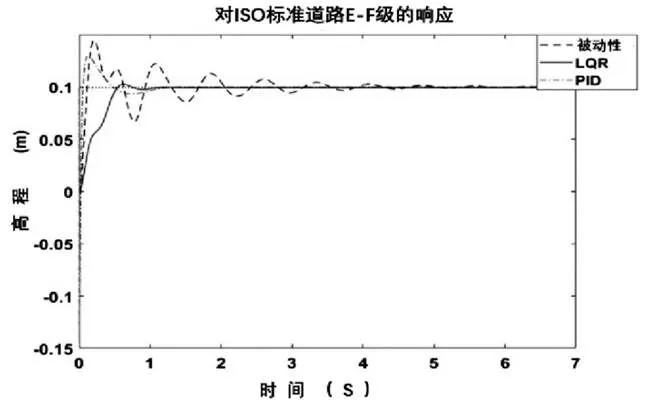
图6 系统的阶跃响应
这些结果表明,对于任何负载和道路条件,系统都可以自我调整,为乘客和驾驶员提供相同水平的舒适性。因此,从这些结果可以推断,即使在极端条件下,使用LQ控制策略,自适应系统也能有效地运行,并提供更好的乘坐舒适性和可靠的操纵性。

图7 系统在崎岖路面上的响应
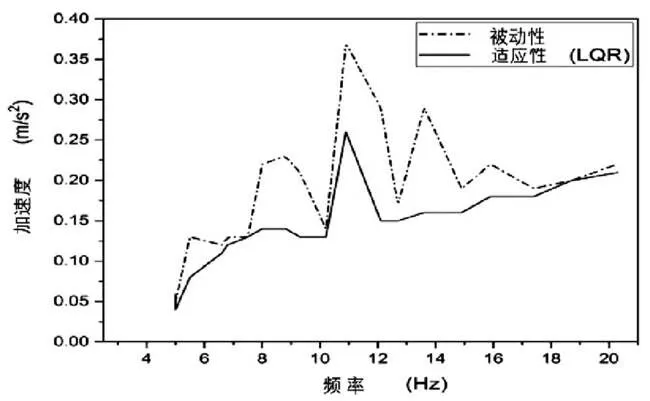
图8 无源和自适应系统在随机振动下的响应
控制器对系统的影响被证明是显著的,因为在无源系统中观察到的大多数尖峰在其应用中被大大减少。从实验中观察到的结果绘制在图7中。相比之下,自适应系统在相同条件下表现出良好的性能,降低了系统的加速度,帮助系统更早地稳定下来(见图8)。
从结果可以明显看出,控制器对有害振动是有效的,并且足以有效地衰减被动系统经历的大部分振动。总结了通过使用控制器观察到的性能和改进。
5 结论
四分之一汽车模型被用来分析悬架系统在用户定义的颠簸、坑洞和随机路面条件下的性能,包括和不包括控制策略。推导了空气悬架系统的静刚度方程,该方程是压力、相对高度和体积的函数。这些考虑提高了结果的准确性。仿真结果表明,由于不能自适应道路,系统会出现不期望的超调和瞬态振动。当引入必要的控制策略时,系统会自动适应路况并高效运行,从而提供更好的乘坐舒适性和操纵特性。
[1] Li S,Yang S,Guo W.Investigation on chaotic motion in hysteretic nonlinear suspension system with multi-frequency excitations. Me -ch Res Commun 2004;31(2):229-36.
[2] Xia Y, Fu M, Li C,Pu F,Xu Y. Active disturbance rejection control for active suspension system of tracked vehicles with gun. IEEE Trans Ind Electron 2018;65(5):4051-60.
[3] Li M,Li Z,Shen X,Guo J.Study on PID control for semi-active air suspension for riding comfort. In: Intelligent Systems (GCIS), 2010 Second WRI Global Congress on, Vol.2. IEEE; 2010, p.47-50.
[4] Li Z,Zheng L, Ren Y, Li Y,Xiong Z.Multi-objective optimization of active suspension system in electric vehicle with in-wheel-motor against the negative electromechanical coupling effects. Mech Syst Signal Process 2019;116:545-65.
[5] Huang Y, Na J,Wu X, Gao G. Approximation-free control for vehicle active suspensions with hydraulic actuator. IEEE Trans Ind Electron 2018;65(9):7258-67.
[6] Xia Y, Fu M, Li C, Pu F, Xu Y. Active disturbance rejection control for active suspension system of tracked vehicles with gun.IEEE Trans Ind Electron 2018;65(5):4051-60.
Modern passenger car adaptive air suspension based on LQR control
Wang Xu
( Yangzhou Yaxing Bus Co., Ltd., Jiangsu Yangzhou 225116 )
Driving on the road under bad working conditions for a long time will reduce the driver's riding comfort. With the increasing demand for ride comfort, the advantage of air spring is especially obvious. This paper presents an innovative design scheme of adaptive air suspension system based on LQR control strategy. The proposed LQR controller is optimized by particle swarm optimization. The passive and adaptive dynamic models of the air suspension system of passenger cars were designed and simulated by MATLAB software. The simulation results show that the adaptive air suspension system can not only ensure the stability of the vehicle, but also reduce the maximum displacement amplitude of the vehicle on the random road, thus improving the ride comfort of the vehicle.
Air suspension; PID; PSO; Adaptive suspension; Ride comfort
10.16638/j.cnki.1671-7988.2021.06.031
U461.4
A
1671-7988(2021)06-101-04
U461.4
A
1671-7988(2021)06-101-04
王旭,就职于扬州亚星客车股份有限公司。
