汽车列车的转弯半径计算
2021-04-07石永金王常清
石永金,王常清
汽车列车的转弯半径计算
石永金,王常清
(上海汽车集团股份有限公司商用车技术中心,上海 200000)
由于运输效率提升的需要,一辆汽车会拖挂多台挂车,为了满足后期运营场景,在设计之初就应对这种汽车列车的最小转弯半径进行计算,评估运营场地或道路情况。文章主要通过汽车列车转动时没有相对转动角速度这一前提条件,对拖拽多台挂车的汽车列车的最小转弯半径进行分析计算,从而得出拖拽3台挂车的最小转弯半径公式,并由此推导出拖拽n台挂车的转弯半径的计算公式。运用该公式对某一机场牵引列车进行计算,该公式的计算结果与实际运营场景相符,证实该公式可用于工程开发和实车应用评估。
汽车列车;最小转弯半径
引言
为了提高运输效率,现在有一辆主车,后面拖拽多辆挂车的情形,如图1所示。这种汽车列车需要更大的使用场地,因此在设计开发阶段就需要详细计算该汽车列车的最小转弯半径,为后期运营提供技术支撑。目前还没有对拖拽多辆挂车的列车转弯半径进行计算的相关技术文献。李相彬[1]对拖拽1辆挂车的转弯过程和最小转弯半径进行分析,吉树祥[2]采用几何法对拖拽1辆挂车的转弯半径公式进行了推导。
本文主要是用两车之间无相对转动的前提,来分析拖拽多辆挂车的最小转弯半径公式,并在此基础上推导出拖挂n辆挂车的最小转弯半径公式。
1 拖拽多辆挂车的汽车列车模型
一辆牵引车拖拽三辆牵引杆挂车的模型如图2所示。牵引车1后部拖拽挂车2,挂车2后部拖拽挂车3,挂车3后部拖拽挂车4。根据刘惟信[3],汽车转向时,车轮应绕着同一瞬时转动中心无滑转的滚动,因此牵引车1前轮两轮胎与后轴延长线交于转动中心O1,牵引车1的后拖拽球铰点C的速度的垂线也通过O1点,并于挂车2的后轴线交于转动中心O2,同理,挂车2的后拖拽球铰点E的速度的垂线也通过O2点,并于挂车3的后轴线交于转动中心O3,挂车3的后拖拽球铰点G的速度的垂线也通过O3点,并于挂车4的后轴线交于转动中心O4。

图1 汽车列车应用场景
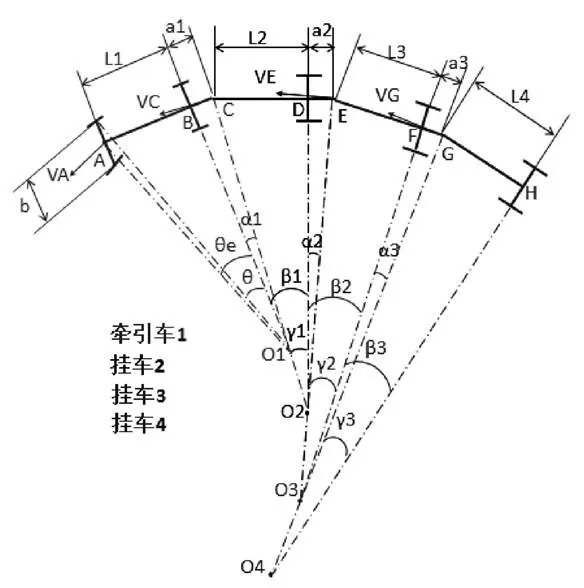
图2 汽车列车(全挂牵引车)模型
牵引车1的前后轴中心点分别为A、B,挂车2的后轴中心点为D,挂车3的后轴中心点为F,挂车4的后轴中心点为H。图中其余参数为:
L1---牵引车1的轴距
a1---牵引车1后拖拽球铰点距后轴距离
b ---牵引车1的前轮轮距
L2---挂车2的轴距
a2---挂车2后拖拽球铰点距后轴距离
L3---挂车3的轴距
a3---挂车3后拖拽球铰点距后轴距离
L4---挂车4的轴距
a4---挂车4后拖拽球铰点距后轴距离
VA---点A的瞬时速度
VB---点B的瞬时速度
VC---点C的瞬时速度
VE---点E的瞬时速度
VG---点G的瞬时速度
θ---VA与牵引车1的中心线夹角
θe---牵引车1前外轮的转角
α1---VC与牵引车1的中心线夹角
β1---牵引车1与挂车2的中心线夹角
γ1---VC与挂车2的中心线夹角
α2---VE与挂车2的中心线夹角
β2---挂车2与挂车3的中心线夹角
γ2---VE与挂车3的中心线夹角
α3---VG与挂车3的中心线夹角
β3---挂车3与挂车4的中心线夹角
γ3---VG与挂车4的中心线夹角
2 转弯半径公式的推导
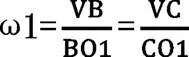
根据运动学知识,可以求出在汽车列车转弯过程中各车辆的角速度及相对角速度。
牵引车1的角速度为:
挂车2的角速度为:

挂车3的角速度为:

挂车4的角速度为:

牵引车1与挂车2的相对角速度为:

挂车2与挂车3的相对角速度为:

挂车3与挂车4的相对角速度为:

汽车列车的转弯半径是由牵引车1前轮转角大小来决定的,后面的挂车是跟随牵引车来转弯的,只要牵引车的前轮的转角大小能确保相邻两车不发生碰撞,然后就可以此转角进行转弯,该转角所确定的转弯半径就是该汽车列车的最小转弯半径。
由文献[3]可以知,牵引车1的最小转弯半径为:
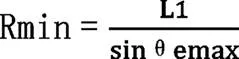
Rmin---牵引车1的最小转弯半径
θemax---汽车列车不发生相邻碰撞的前外轮最大转角
相邻两车如果不发生碰撞,也就是相邻两车的相对角速度等于零,如果两车相对角速度不为零,那么这两车就会有相对运动,最终导致两车碰撞[1]。
下面就逐一分析相邻两车不发生碰撞时的牵引车前外轮能允许的最大转角。
2.1 牵引车1的转弯参数分析
由图2可知:



2.2 牵引车1与挂车2所允许的最大转角
把(10)代入(1)得牵引车1的角速度为:
把(11)、(13)、(14)代入(7)得牵引车1与挂车2的相对角速度为:

由ωr12=0,得:

可得:


其中:
当牵引车1与挂车2的相对夹角满足(19)时,且牵引车1的前外轮转角e满足(16)时,两车不发生碰撞。
2.3 挂车2与挂车3所允许的最大转角
由图2可知:


把(12)、(22)代入(21)中,得:

根据三角函数关系,把(18)代入(23)式,有:



把(24)、(26)代入(6)式得挂车2与挂车3之间的相对角速度为:

同2.2分析,只有当:

且

挂车2与挂车3才不会碰撞。
由(28),有:

由(29),得:


其中:
2.4 挂车3与挂车4所允许的最大转角
由图2可知:


把(25)、(35)代入(34)中,得:

根据三角函数关系,把(31)代入(36)式,有:



把(36)、(39)代入(7)式得挂车3与挂车4之间的相对角速度为:

同2.2分析,只有当:

且

挂车3与挂车4才不会碰撞。
由(41),有:

由(42),得:


其中:
2.5 组成n辆的汽车列车所允许的最大转角
由上面推导过程可以看出,如果相邻两车不发生碰撞的前提是两车的相对角速度为零,可以从公式(16)、(30)、(43)可以推导出,组成n辆的汽车列车所允许的牵引车前外轮最大转角为:

式中:
n---组成汽车列车的数量
i---汽车列车的序号,i=1,2,…,n
Li---轴距或挂车铰接点至后轴的距离
ai---牵引车后轴至铰接点的距离
用公式(47)求得的一系列牵引车前外轮最大转角θei,取θemax=min{θei},然后代入到公式(8)中,取得的转弯半径就是该汽车列车的最小转弯半径Rmin。
可以从公式(19)、(32)、(45)可以推导出,组成n辆的汽车列车所不发生碰撞时的两车中心线夹角为:

式中
3 应用范围分析
上面的分析的例子的牵引车1是用全挂牵引车进行分析,如果牵引车1是半挂牵引车的话,汽车列车所允许的牵引车前外轮最大转角e的公式(47)不变。而所求两车不发生碰撞时的中心线夹角i的公式(48)改为“-”i即可。半挂牵引车的情况见图3所示。
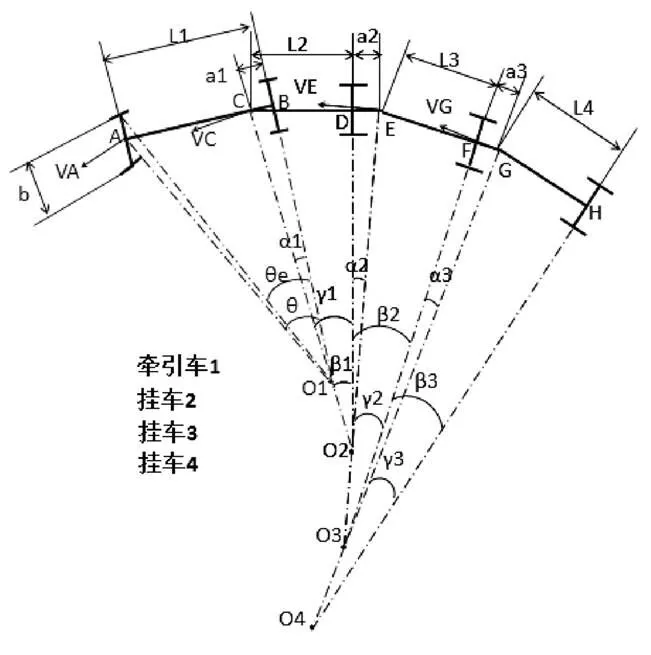
图3 汽车列车(半挂牵引车)模型
挂车分为半挂车(中置轴挂车和牵引杆挂车)和全挂车,见图4所示。由于全挂车的前轴为转向轴,一般全挂车的转向轴的转角都比较大,不是限制转弯半径的关键因素,所以在分析最大转角时,不考虑全挂车转向轴的转角限制。因此在分析最大转角的公式(47)中,所用到的Li,应为挂车前铰接点到后轴的距离。
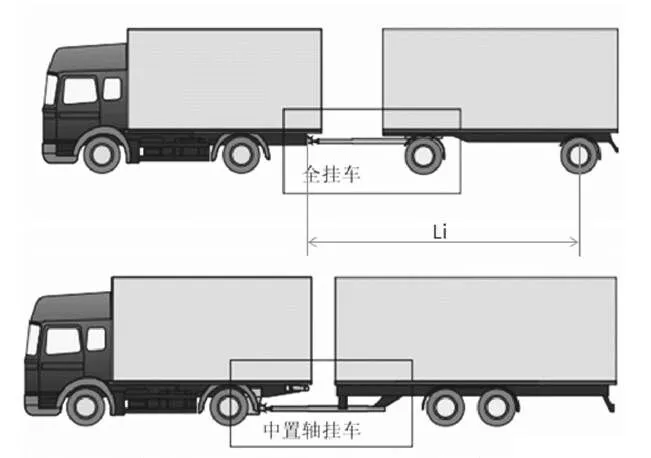
图4 半挂车与全挂车的区别
公式(48)所求得的两车中心线的夹角i,工程开发时必须保证,在这个角度范围内,不允许有物理干涉情况出现。
4 应用实例
以某机场牵引列车为例,来求该列车的最小转弯半径。该车见图5。

图5 某机场牵引列车
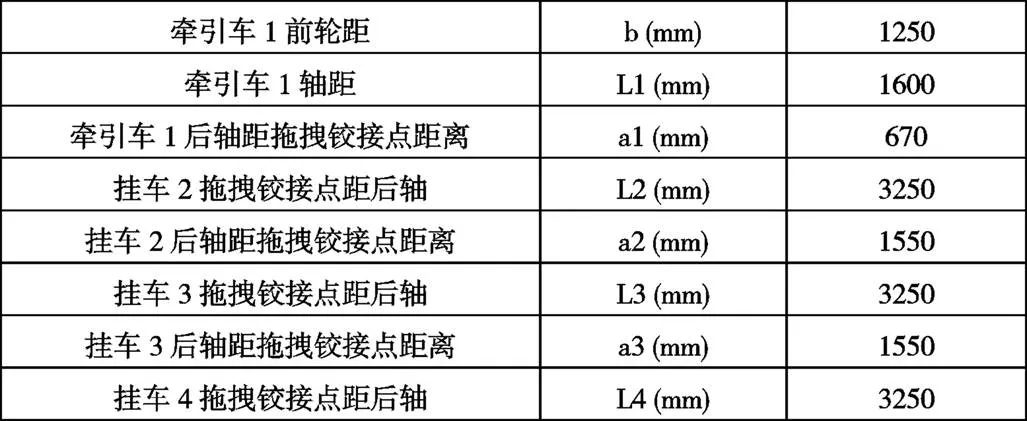
该机场牵引列车的相关参数见表1所示。
表1 某机场牵引列车参数
计算结果见表2。
表2 某机场牵引列车最小转弯半径计算结果
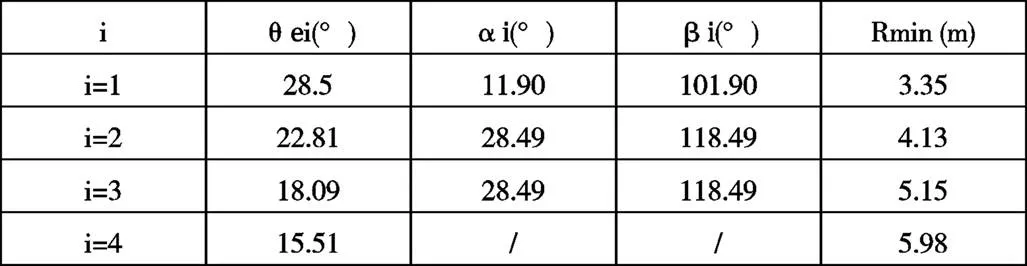
由表2的计算结果可以看出,虽然牵引车1的最大前轮外转角可以达到28.5°,但由于拖挂上3列挂车后,这个最大转角减小到15.51°,因此该汽车列车的最小转弯半径从3.35m增大到5.98m。
5 结论
本文通过一个全挂牵引车拖拽3辆挂车的分析,得到汽车列车的最小转弯半径计算公式,并在此基础上,推导出组成n辆的汽车列车的最小转弯半径公式(47),可以用于工程开发和实车应用评估。
从公式(48)中所求得的两车中心线的夹角i,对工程开发可以提供指导意义,在这个角度范围内,设计时不允许有物理干涉情况出现。
[1] 李相彬.汽车列车转弯过程的分析及其最小转弯半径的确定[J].汽车技术,1981(11):18-21.
[2] 吉树祥.半挂汽车列车最小转弯直径的计算与分析[J].江苏交通科技,1997(4):39-41.
[3] 刘惟信.汽车设计[M].北京:清华大学出版社,2001:609-610.
Calculation the Turning Radius of Combination Vehicles
Shi Yongjin, Wang Changqing
(SAIC Commercial Vehicle Technical Center, Shanghai 200000)
Hoping to improve transport efficiency, a vehicle can tow several trailers. The minimum turning radius of the combination vehicles should be calculated at the design stage. It can be used to evaluate the running scenarios and road conditions. The paper mainly talked about calculation the turning radius of combination vehicles of towing several trailers based on no relative angular velocity between tractor and trailers, and deduced the formula of combination vehicles with 3 trailers, and deduced for n trailers. This formula is applied in an airport tractor combination vehicles and the result is compliance with reality. So it can be applied for engineering development and realistic application assessment.
Combination vehicles; Minimum turning radius
10.16638/j.cnki.1671-7988.2021.06.030
U467
A
1671-7988(2021)06-96-05
U467
A
1671-7988(2021)06-96-05
石永金,就职于上海汽车集团股份有限公司商用车技术中心。