基于最大电流的双无刷直流舵机错峰起动控制
2021-04-06李晨阳
李晨阳
(西北工业大学 自动化学院,西安 710129)
0 引 言
舵机作为操纵飞行器或船舶舵面(操纵面)转动的一种执行部件,是系统中不可或缺的组成部分。舵机一般可分为两种,即由电动机和传动部件组成的电动舵机以及由液压作动器与旁通活门组成的液压舵机[1]。
电动舵机相较液压舵机,具有同等体积下输出扭矩更大、加工装配简单、维护改装方便等优点,在航空航天等领域应用越发广泛。随着各类新型永磁体的出现以及电力电子器件的发展,航空电动舵机领域也逐渐开始使用无刷直流电动机作为其执行机构,无刷直流电动机由于其结构简单、没有换向火花、控制简单、调速性能好、可靠性高,具有较大的应用前景[2]。
电动舵机系统是由无刷直流电动机直接驱动的,在运行过程中需要频繁作动,因此会出现两台电机工作在不同工作状态的情况。而无刷直流电动机起动电流较大,若两台电机同时起动,峰值电流将更大,在一些容量较小的飞行器中过大的瞬时电流会拉低母线电压,影响其他用电设备,威胁系统整体的稳定性。
文献[3]提出一种基于数字信号处理(DSP)和复杂可编程逻辑(CPLD)的双无刷直流电动机控制系统,利用DSP的两路PWM接口与CPLD的12路PWM信号控制两个三相全桥逆变器,实现对两台无刷直流电动机的转速、电流双闭环控制。文献[4]针对现有无刷直流电动机软起动电路存在的问题,优化电机软起动电路控制拓扑,排除软起动失效故障,实现了通过逐渐增加电机绕组电压来减小电机起动电流的功能。文献[5]提出一种基于CPLD的无刷直流电动机软起动控制方法,分析了采用PWM波来减小电机起动电流的方案,通过实验证明其能够较好适应负载起动的工况。
本文针对共直流母线的双无刷直流舵机起动过程中会出现电流需求过大的问题,在提出单台电机软起动策略的基础上,设计了一种双电机降低电流起动方案,能够在降低起动电流需求的同时,实现两台电机平稳快速起动。
1 无刷直流电动机软起动策略分析
理想的无刷直流电动机数学模型所研究的两相导通三相六状态无刷直流电动机(星形连接)感应电势方程与电压平衡方程:
EΦ=CeΦn
(1)
E=2EΦ=US-2ira-2ΔU
(2)
式中:EΦ为每相感应电势;Φ为气隙磁通;n为电机转速,;E为线电动势;US为电源电压;ΔU为开关管管压降;i为相绕组电流;ra为相绕组电阻。
由式(2)可以得到相电流表达式:
(3)
可以看出,导通相绕组中的电流大小与电源电压、每相感应电动势有关。而感应电动势与转速成正比,无刷直流电动机起动时转速较低,起动电流将会非常大,产生的冲击会对电机产生瞬时热冲击,会导致电路中功率管的损坏。
电磁转矩由定转子磁场相互作用产生,可以推得转矩方程:
(4)
式中:Te为电磁转矩;kT为转矩系数。
根据式(4),电流的波动直接造成转矩波动,甚至会对传动设备造成机械损伤。为此,需对电机设定一个最大起动电流Ismax,能够在确保电机迅速起动的同时,不会对系统中其他设备造成损伤。
本文以传统无刷直流电动机控制策略为基础,针对电压源型逆变器拓扑结构,根据平均值等效原理提出了占空比逐渐增大的控制策略,以减小起动时绕组端施加的平均电压,从而弱化起动电流峰值,满足无刷直流电动机调速需求。无刷直流电动机驱动电压Us、调制占空比D与驱动电源电压Ud的关系:
Ud=DUS
(5)
设稳态时,开关管频率为f,电机极对数为p,绕组线电感为La,线反电动势系数为ke,一个控制器周期为T1,一个控制周期内电机平均转速为nn,则电压动态方程:
(6)
电机刚起动时,反电动势keωe较小,在第一个控制器周期内可以忽略不计。可计算得:
(7)
电机开始旋转后,反电势keωe不可忽略,若不考虑换相过程影响,求解式(6)得最大定子电流与占空比之间的解析关系:
(8)
根据最大起动电流Ismax,计算得第1个周期占空比:
(9)
第n个周期占空比:
(10)
分析上述电流推导过程可知,若确定一个起动总时间ts,可以根据Ismax的值选择合适的占空比初始值,逐周期对占空比调整,从而降低起动电流,实现无刷直流电动机的软起动。
2 仿真分析
分析无刷直流电动机基本控制原理,在MATLAB/Simulink平台建立仿真模型,如图1所示。

图1 无刷直流电动机软起动仿真模型
根据无刷直流电动机软起动原理,在起动初期设定一个特定占空比,在转速逐渐增加的同时增大占空比,直至转速增大到nc时切换控制状态至转速闭环。软起动期间无刷直流电动机转速与电流波形如图2所示。

(a) 电流波形
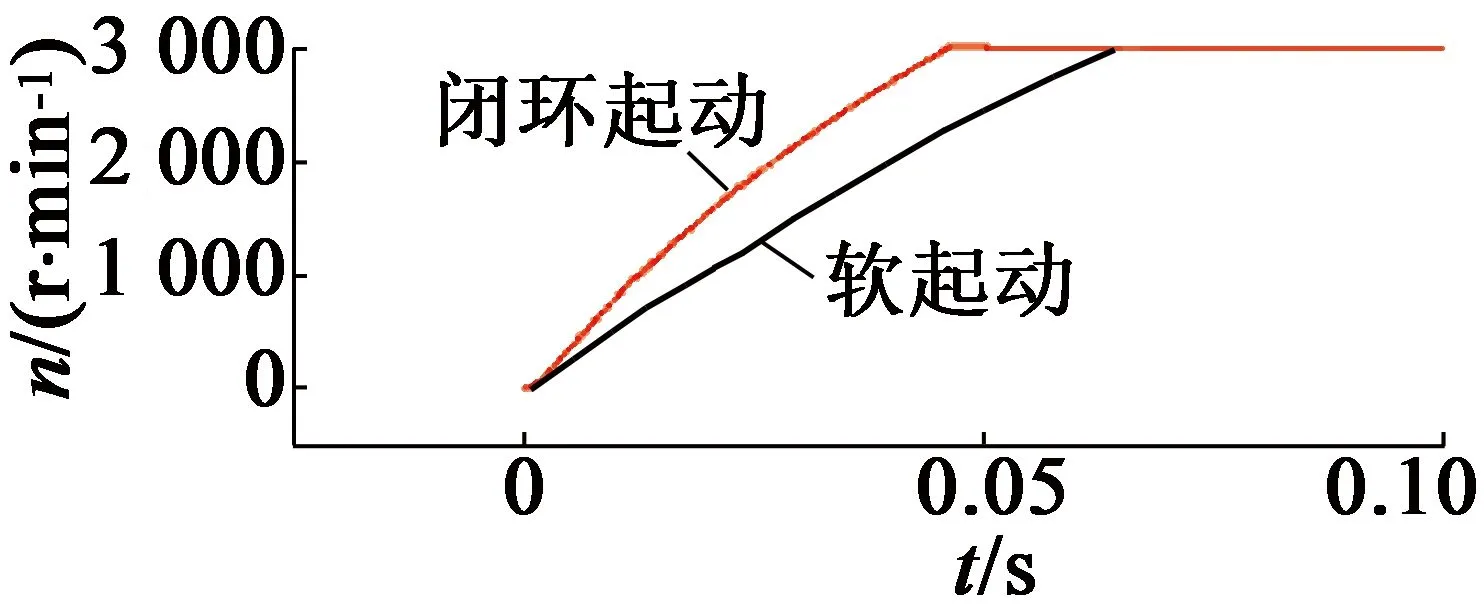
(b) 转速波形
与转速闭环起动时相比,本文的软起动策略可以大幅减小起动电流,在100 ms内完成起动并实现转速稳定,仍能保持响应的快速性。当一台电机平稳运行而另一台电机开始起动时,系统对电流的需求低于直流电源的输出能力,对系统影响较小。
3 双电机起动电流分配策略
本文所研究的共直流母线双无刷直流舵机系统,是指一个直流电源为两台无刷直流电动机供电,其电路拓扑如图3所示,这样的多电机系统在实际工程应用中非常常见。

图3 共直流母线双无刷直流舵机系统
本系统直流母线电源最大输出电流为30 A,在此前提下,以最大母线电流为原则,实时整定占空比,对双无刷直流电动机进行错峰起动控制。
在共直流母线双舵机系统中,若两台电机同时起动或同时加速,两者叠加将使母线电流急剧增大甚至超出电源电流输出能力,同样会对系统带来较大的不利影响。本文提出一种共直流母线无刷直流电动机错峰起动的方法,旨在解决两台电机同时起动的电流分配问题,错峰起动策略如图4所示。在起动时间的最初几个控制器周期内,仅对电机1进行软起动,在其电流下降到Ismax1时,电机1保持相应转速,电机2开始软起动,直至电机2的起动电流下降到Ismax2,电机2保持相应转速,电机1加速。此后的起动过程中,每一段施加特定占空比的时间内,均由电机1先进行加速,而后电机2加速。即通过实时切换控制策略,使两台电机起动过程中电流波动的峰值出现在不同的时间。待加速完成,使得两台电机电流之和小于直流电源的电流输出能力,实现对母线输出电流的合理分配、管理。

图4 共直流母线无刷直流电动机错峰起动策略
图5为共直流母线无刷直流电动机错峰起动的电流波形、转速波形和总电流波形。初始起动阶段(小于2 500 r/min),单台电机抽取母线电流幅值较大(均在15 A以上),若两台电机同时起动,则直流母线电流将超过30 A,不满足直流电源应用要求。根据前述理论分析和公式推导,当电机转速小于2 500 r/min时采用错峰起动控制策略,满足母线电流峰值不超过30A的限幅要求;转速达到2500 r/min后,母线电流峰值下降到15 A以下,综合考虑电源利用率和缩短起动时间的角度,之后两台无刷直流电动机可切入到转速闭环。

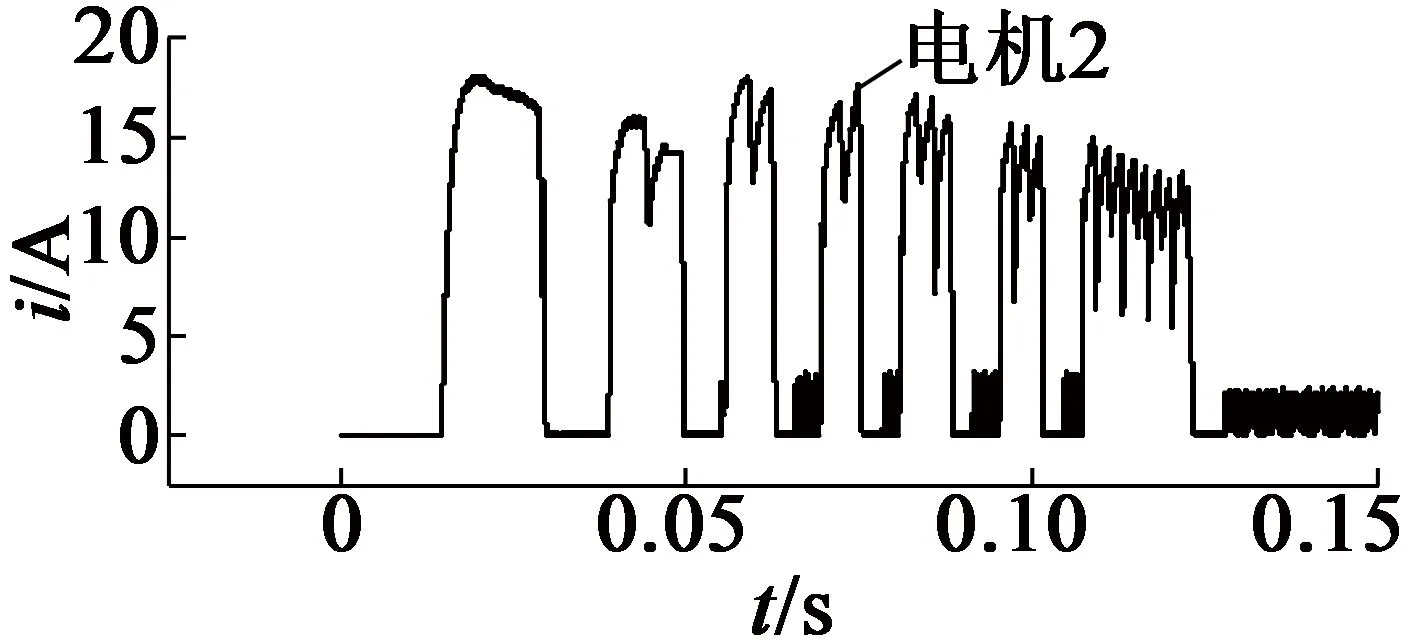
(a) 电流波形

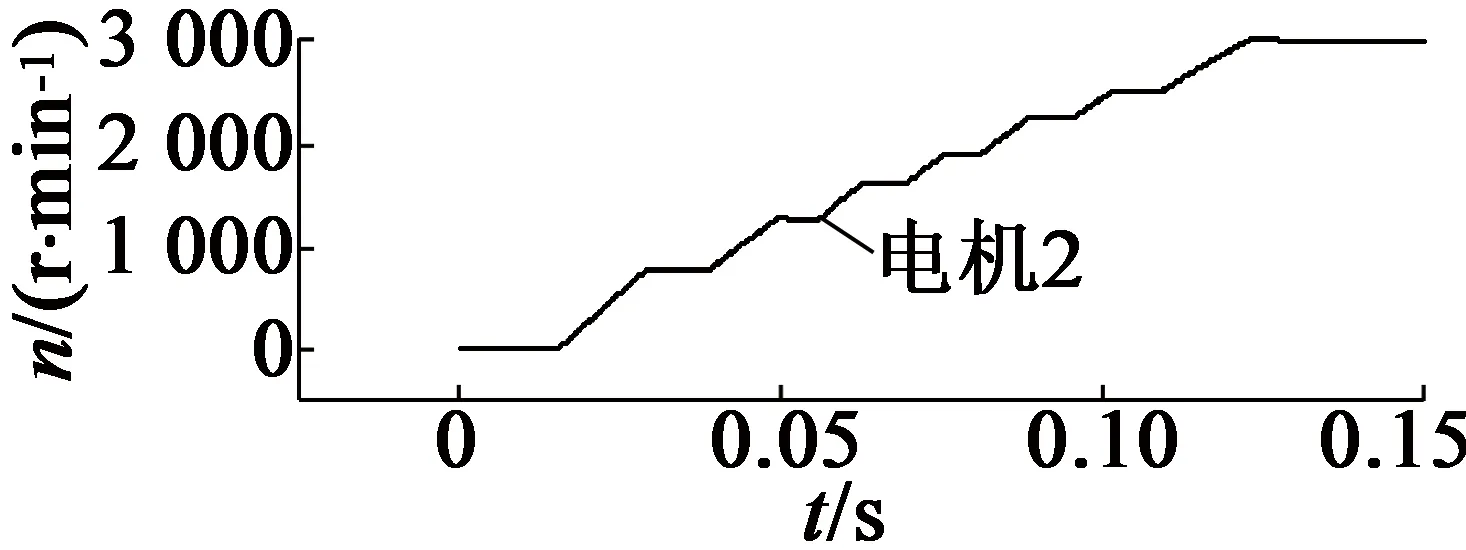
(b) 转速波形

(c) 总输出电流波形
采用错峰起动控制策略,有助于降低IGBT通态损耗,提高了效率。IGBT的通态损耗是指其导通过程中存在的导通压降产生的损耗,导通特性可由线性公式近似描述:
(11)
式中:vCE为 IGBT的实际导通压降;vF为快恢二极管的实际导通压降;Tj_T为 IGBT的实际结温;Tj_D为快恢二极管的实际结温;rce为 IGBT的实际通态电阻;rF为快恢二极管的实际通态电阻;Vce_25℃为 IGBT在25 ℃时的导通压降;VF_25℃为快恢二极管在25 ℃时的导通压降;Kv_T为IGBT 导通压降的温度系数;Kv_D为快恢二极管导通压降的温度系数。
根据上述公式结合前述分析可知,采用错峰起动控制策略可以有效降低绕组间导通电流,有效降低IGBT和快恢二极管的实际导通压降vCE和vF。再由功率计算公式,可推知IGBT和快恢二极管对应的通态损耗pcond_T和pcond_D分别如下:
(12)
式中:φ为电流、电压相角关系;Iout为电流有效值。
如式(12)分析可知,绕组间导通电流的减小,同时有助于通态功率损耗和内阻损耗,提高控制器的工作效率。
4 结 语
针对共直流母线双无刷直流舵机频繁起停的工作特点,本文提出了一套完整的直流无刷舵机起动方案。在仅单台电机起动时,采用限制PWM占空比的策略,避免了无刷直流电动机起动时过大的起动电流对系统的冲击,从而保证另一台电机的平稳运行。在两台电机同时起动时,以最大电流原则,灵活调整占空比,错开两台无刷直流电动机起动时电流的峰值,降低对母线电流的总需求。仿真结果与理论分析相吻合,证明了错峰起动控制策略的有效性,该策略在多电机控制系统和作动较多的工作环境具有普遍适用性。
