舰载多功能一体化系统设计关键因素分析∗
2021-04-06王玉珏杨心武刘佳丽
王玉珏 杨心武 刘佳丽
(1.海军研究院系统工程所 北京 100036)(2.武汉船舶通信研究所 武汉 430205)
1 引言
随着海军装备不断发展,舰船平台对通信、雷达、电子战等电子功能的要求越来越高,为满足平台对多种电子功能的需求,将多种单一频段、单一功能、单一体制的电子系统进行简单堆积是较为普遍和原始的做法。这种做法在舰船平台上形成了一个个“烟囱”系统,并造成平台上结构复杂、电磁干扰、空间占用等系列问题。为避免这些问题,舰载多功能一体化系统应运而生,相比单功能系统,多功能一体化系统具有以下几方面的优势。
1)资源集约使用。多功能一体化系统通过将天线、射频设备、信号/信息处理设备等分别进行共用化、通用化和软件化设计,在减少装备种类的同时,满足多种应用的共享调用,相比烟囱式系统的专机专用方式,大大提高了资源利用率。
2)实现协同增强。多功能一体化系统可以通过能力互补、信息共享,实现单一功能系统所难以达到的能力。例如,通信功能可依托雷达的大型阵列天线提高发射增益和接收灵敏度;侦察测向可为定向窄波束通信提供方位引导,省去通信自身的对象捕获程序;电子干扰发射通道可作为强干扰下的备用通信,可突破干扰噪声本底,实现“扰中通”;低延时的通信链路可为多点协同侦察提供信息传输通道,增强侦察测向定位精度。
3)改善电磁兼容。多功能一体化系统通过统一的资源管理与调度控制,面向战略、战役、战术级作战场景设计自动化、智能化的多功能使用流程控制程序,代替目前被动、松散的电磁兼容管理过程,一方面可提高系统运作效率,另一方面可改善不同系统同时工作的电磁干扰状况,增强平台的整体作战效能。
4)提升隐身性能。多功能一体化系统采用集成有源相控阵天线设计,可与平台上层建筑平面共形,且使用定向波束承载不同的功能,能够提高装备的被动和主动隐身性能。
2 国外典型多功能一体化系统开发项目
多功能一体化系统的研制工作一直是美欧海军强国的关注重点。美国海军自20世纪90年代就在多功能一体化领域开展了多个项目。1990年至1994年期间开展的高级共用孔径项目(ASAP)研制了一种覆盖C~Ku频段的宽带孔径阵列,可同时支持雷达、电子对抗、电子支援和通信功能[1];1995年实施的先进封闭式桅杆/传感器系统(AEM/S)项目集成了通信天线、雷达和附带的传感器,封闭式桅杆一方面保护内部部件不受环境影响,另一方面可降低舰艇的雷达散射截面积。AEM/S试验样机于1997年在DD968驱逐舰上进行了测试[2];1997年开展的多功能电磁辐射系统(MERS)项目将作战测向、联合战术信息分发系统、特高频视距通信和敌我识别四种舰载功能天线综合成一副雷达散射截面低、重量轻的天线系统。MERS于2004年在美国海军LPD级两栖登陆舰上完成海试[3];1995年,美国海军启动先进多功能射频系统项目(AMRFS,后演变为先进多功能射频概念(AMRFC)),并于2004年完成了在6GHz~18GHz频段内同时支持通信、雷达和电子战功能的测试。AMRFC中的电子侦察、通用数据链等部分技术已经应用于美国海军新一代驱逐舰DDG-1000中[4];2004年至2008年间开展了多功能电子战(MFEW)项目,可执行多种电子支援功能,MFEW样机安装在美国海军康斯托克号(USS Comstock)船坞登陆舰上[5];2008年~2016年开展的集成上层建筑项目(InTop)旨在开发一种集电子战、信息作战、雷达和通信能力为一体的多功能系统,其核心是开发模块化的开放体系结构以适应技术和海军需求的变化,能够适用于多级海军战舰和潜艇[6]。
此外,欧洲国家也相继开展了类似的多功能一体化项目。英国于1992年开始研制的先进技术桅杆(ATM)系统允许本舰上的雷达和通信信号穿透,同时阻止来自舰外干扰、噪声或其他频率信号的进入,该系统已应用于英国皇家海军航母中[7];意大利和瑞典于2005年联合开发的M-AESA项目瞄准雷达、电子战以及通信功能的集成,目标是开发和验证一个通用射频硬件平台,可搭载于水面、空中和地面等各类型平台[8];荷兰于20世纪90年代开始研究的综合桅杆系统(I-MAST)可以集成舰船雷达、光电传感器、敌我识别、电子战、卫通等多种功能,2010年装备于其巡逻船[9],随后又开展了可缩放式多功能射频系统(SMRF)研究[10]。
3 通信、雷达和电子战功能要求
3.1 通信功能要求
通信是实现海战场空中、水面、水下不同节点之间互联互通的“纽带”,可满足视距、超视距以及全球范围的通信要求,具有“立体全方位”“全时不间断”“多频段工作”的特点。
1)工作频段。舰载通信功能覆盖从HF、VHF、UHF到L、C、Ku/Ka等多个通信频段。考虑到集成难度与效费比,并不是所有频段都适合集成于多功能一体化系统。例如,频率较低的语音和战术数据链(Link16、Link22)一般采用全向单极天线或偶极天线,造价便宜,而体积较大,无需在一体化系统中集成;UHF和L频段的卫星通信采用简单的低增益螺旋或锥形天线提供半球形波束方向图,天线简单紧凑,RCS值贡献率不高,集成到一体化系统的需求也不明显;Ku/Ka频段的卫通设备为满足高增益要求,采用直径在1m~2m左右的抛物面天线。该结构带来较大的RCS值,有必要集成到一体化系统中;美军舰载战术通用数据链(TCDL)天线直径达1m,高1.1m,重量为200kg,至少需要四路配置独立天线的TCDL链路满足多路使用要求,应考虑将TCDL功能迁移至一体化系统中。
2)动态范围。通信功能的动态范围要求主要是体现系统可同时处理最大和最小功率信号的能力,对应不同的高阶正交幅度调制方式,其处理的电平也会不同。
3)等效全向辐射功率(EIRP)。通信功能的EIRP要求反映了对应频率信号下补偿雨衰以及传播路径上单向几何传输损耗所需的功率值,以满足在接收端具有足够高的信噪比。TCDL的EIRP值要求明显低于卫通,主要是因为TCDL的工作距离仅为200km,而位于地球静止轨道的通信卫星与地面单向信号传播距离达36000km。
4)波束宽度。波束宽度与天线增益可相互换算,波束宽度可用于指示系统所需的天线增益,以确保满足接收机信噪比要求和期望的信道容量。
5)占空比。当通信功能在激活时,信号的占空比可达100%;在半双工通信模式或猝发通信下,信号的占空比则小于此值。
6)极化。卫通的极化特征是发射和接收相互正交,包括水平和垂直线极化,以及左旋圆极化和右旋圆极化两组正交。极化正交使得发射和接收通道在频分的基础上进一步增加隔离度,也可减小收发频率的间隔要求。对于舰载和机载TCDL,由于在通信期间难以保证双方天线时刻极化对齐,一般采用圆极化避免极化错位带来的信号衰落。
3.2 雷达功能要求
舰载雷达功能主要包括立体搜索(VS)、水平搜索(HS)和终端照射(TI)三种功能模式,VS模式覆盖舰船甲板以上的半球空间,提供远程探测和跟踪功能;HS模式侧重于对地平线附近低仰角目标的探测和跟踪,例如探测超音速掠海飞行的反舰导弹。相比VS,HS搜索范围较小,对处理小RCS目标、海杂波、多径干扰、大气波导等异常传播条件要求较高。TI模式是在导弹终端制导阶段提供目标照射,以便导弹导引头可追踪反射信号。
1)工作频段。舰载雷达大多工作在L~Ku频段,其中VS通常工作在L或S频段,该频段受大气衰减影响较小,从而支持远程探测;HS模式则常使用较高的S或X频段,这是因为高频率下,海洋表面的信号反射仰角较窄,形成的多径干扰相比低频率小。并且,HS模式为尽可能延伸探测地平线的距离,要求天线安装位置高、尺寸小、波束窄、增益高,高频率更符合这些条件。TI模式一般工作在X频段,以便与半主动导弹的导引头兼容。
2)波形带宽。雷达的距离分辨率与其采用的波形带宽成反比。HS要求更高的分辨率,其所需的波形带宽略大于VS。波形带宽的增加意味着较大的接收机带宽,会引入较多的噪声,为此,需要将波形带宽与接收机带宽相匹配以减少影响。TI模式则基本为单频工作。
3)动态范围。VS、HS模式的接收机动态范围要求由最高的预期杂波+目标反射功率与最弱预期目标反射功率的比例确定。TI模式无接收组件。
4)EIRP。舰载雷达通常要求具有较高的EIRP,VS模式侧重于探测距离,HS模式侧重于小RCS值的目标。由于较低频率具有更好的传播特性,工作在L频段的VS模式所需的EIRP略低于工作在S或X频段的HS模式。需要指出的是,接收阵列增益(Gr)也会影响系统对EIRP的要求,接收的雷达信号信噪比与EIRP×Gr成正比,因此,提高接收阵列的增益可以在不影响探测范围的情况下降低EIRP要求。TI模式的EIRP由导弹导引头对终端制导所需的反射目标信号强度决定。
5)波束宽度。天线阵列形成的最小波束宽度与阵列尺寸成反比。VS和HS模式所需的波束宽度主要来自跟踪精度和所需扫描重访时间要求。TI模式没有独立的波束宽度要求。
6)占空比。VS和HS模式信号占空比与不模糊距离、盲区范围和平均波形功率等多个因素有关。雷达信号的占空比远小于通信和电子战。TI模式下,照射波形基本上为连续输出,占空比高达100%,具体与半主动导弹导引头的能力相关,例如改进型“海麻雀”导引头支持中断连续波照射制导,此时TI模式能以小于100%的占空比进行传输。
7)极化。雷达功能通常使用线性垂直极化,主要是因为对HS模式有益,而对其他模式无影响。首先,在小于几度的雷达掠射角和更高的海况下,垂直极化的海杂波回波小于水平极化的海杂波回波。其次,根据布鲁斯特角效应,在低掠射角下,远离海面的正向镜面发射对垂直极化的影响小于对水平极化的影响。
3.3 电子战功能要求
3.3.1 电子支援(ES)模式要求
ES模式工作在接收模式下,可对雷达信号进行自动检测、分析、识别、分类和测向等。分析任务包括对到达时间、频率、脉冲重复间隔、脉冲宽度、波形调制等波形参数的测量。ES模式可针对敌方或未知的发射器提供早期威胁预警。电子攻击(EA)模式依赖ES提供的威胁方位等信息,以便及时在威胁方位上准确实施干扰。
1)工作频率。ES的工作频率通常覆盖5GHz以下的通信频段、1GHz~12GHz内的监视和火控雷达频段、以及高于8GHz的主动导弹引导头辐射频段。
2)带宽。ES所需的典型瞬时带宽远高于雷达,这是因为ES需要检测并正确表征来自发射器的高宽带波形。值得注意的是,由于缺乏雷达系统对接收波形先验匹配滤波过程,大的瞬时带宽会引入系统噪声,对信号检测和分析不利,一般在前端增加一组窄带滤波器。
3)动态范围。ES功能所需的接收机动态范围是接收机输入端预期最强威胁信号功率与接收机噪声基底功率之比。
4)波束宽度。对于ES,波束宽度反映了在接收波束内必须测量检测到的入射角到达角(AOA)精度,从而有效确定威胁方位。如果到达信号具有足够高的信噪比,则可通过不同阵元上接收到的相位对比结合干涉算法,确定AOA。对于强信号,该方法执行起来简单,并且基本上可以在阵列的整个波束宽度上进行瞬时检测。然而,对于弱信号,需要提高形成窄波束的天线的增益来改善信噪比。
5)极化。ES功能必须能够检测所有极化方向的射频信号。军事通信涵盖所有极化方式,例如,舰载雷达通常使用垂直极化,机载雷达通常使用水平极化,部分军事通信系统则采用圆极化。
3.3.2 电子攻击(EA)模式要求
EA发射射频信号以干扰威胁电子系统,通常采用的干扰技术包括噪声干扰、多虚假目标、距离门拖引(RGPO)和角度门拖引(AGPO),各干扰技术协作执行。干扰机可基于此前捕获存储的波形数字样本,发射出敌方威胁雷达波形的复制品。此时,干扰波形享有与威胁雷达信号相同的脉冲压缩增益,从而减少所需的有效干扰功率。干扰机还可以在发送前修改复制品,如增加一个时延以有效地将距离偏移至一个虚假目标上。在噪声干扰的情况下,可产生所谓的“点”噪声,其带宽与此前捕获到的波形带宽相匹配,从而保证干扰功率全部注入到威胁雷达的瞬时带宽中。
1)工作频率。EA功能需要干扰各种监视和火控雷达以及主动导弹引导头等威胁系统的频率。
2)瞬时带宽。EA功能的瞬时带宽是其需要复制和传输的威胁信号的最大带宽。
3)动态范围。在多功能一体化系统中,EA功能的接收部分可由ES功能提供,因为二者的工作频率、瞬时带宽和极化要求基本相同,因此,EA功能仅工作于发射模式,没有动态范围要求。
4)EIRP。EA功能采用相干干扰技术,可最大化有用干扰功率对威胁雷达的作用效果。相比雷达反射信号需经历双向几何传播损耗,EA功能只经历单向的几何传播损耗,因此,其EIRP值小于雷达,但其到达威胁雷达的干扰信号也需强于威胁雷达反射回来的信号。
5)波束宽度。EA功能没有独立的波束宽度要求。波束宽度仅由阵列天线大小决定,阵列天线的大小要能够提供满足EIRP要求所需的传输增益。
6)占空比。EA功能的传输占空比可能高达100%,例如,当威胁雷达在使用连续波形照射舰船以提供对半主动导弹的终端制导,而同时本船正在利用AGPO方式进行对抗时,不允许有任何中断。
7)极化。EA功能需要具备支持各个极化方向上干扰的能力。EA功能可以从ES功能检测的威胁信号属性列表中获取关于威胁系统的极化状态信息。或者,如果ES功能在正交极化上捕获并存储威胁信号的数字样本,则EA功能在传输该样本复制品时可确定正确的极化状态[13]。
4 多功能一体化系统设计考虑因素权衡
理想情况下,多功能一体化系统是一个超宽带的综合射频孔径系统,覆盖从低到高所有的通信、雷达、电子战的工作频段。如图1所示,理想多功能一体化系统由天线阵列、数字接收机、数字波形发生器、信号与数据处理以及资源分配管理器等部分组成,采用公共通用的硬件实体来实现雷达发射与接收、电子攻击/支援、通信发射与接收等功能,并通过统一的资源管理系统实现集中式的资源管理调度与控制。

图1 多功能一体化系统理想概念图
特别是,理想化多功能一体化系统采用收发阵列共用的方式构建天线阵列,同时实现雷达、电子战和通信功能,天线单元采取双极化工作方式,分别对应不同功能的极化需求。并且在资源分配管理器的统一管控下,实现各类功能的协同工作。
然而,受制于现有硬件技术,在成本与性能约束下,上述理想化的多功能一体化系统在实际设备研制中几乎不可能实现。现阶段,在多功能一体化系统的设计中,天线收发的共用或分置、信号的共用或复用、集成处理与安全隔离等考虑因素的权衡取舍是实际需要考虑的重要问题。
4.1 天线收发共用或分置的权衡
理想化多功能一体化系统天线为收发共用,天线收发共用能够最大限度地共享硬件资源,减少天线数量与体积,有利于舰面天线布置与隐身设计。收发共用天线每个T/R组件中的Tx通道和Rx通道共用一个辐射单元,完成射频收发功能,如图2所示。其中,环形器是实现该模式的关键,环形器是一个不可逆的三端口器件,理想情况下可实现射频信号在一个方向上通过端口,避免反向的泄露,从而隔离高功率放大器(HPA)与低噪声放大器(LNA)之间的信号影响[13]。
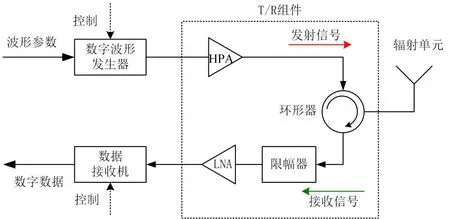
图2 理想化多功能一体化系统中天线收发共用示意图
然而,在实际实现中,T/R组件的环形器无法完全抑制反向的射频信号。现有技术水平下,端口间的隔离度一般为30dB,能够隔离高功率放大器与阵元之间的反向功率,但不满足与低噪声放大器之间的隔离要求。当Tx通道中高功率放大器功率过高时,Rx通道的低噪声放大器会进入饱和。而舰用雷达一般功率较高,为满足雷达的等效全向辐射功率(EIRP)要求,需要增加更多的T/R组件模块与辐射单元,造成天线尺寸重量以及成本的增加。
实际实施中,天线进行收发分置设计,Tx通道与Rx通道之间断开,不存在信号相互馈送问题。发射天线与接收天线之间主要是自由空间上的电磁耦合,通过物理上距离的拉远即可提升Tx通道与Rx通道之间的隔离度,达到满足使用要求的目的。收发分置模式下,Tx通道可以采用大功率的高功率放大器,不存在功率限制。同时,天线设计更加灵活,收发天线可根据自身的波束、增益等要求,采用不同大小、材质的辐射阵列。然而,收发分置最主要的问题在于天线阵列的数量翻倍,给舰面天线布置与集成带来一定困难。
4.2 资源共用型或复用型的权衡
理想化多功能一体化系统将通信、雷达、电子战的波形一体化设计,支持信号和信道资源的共用,实现多功能的共时间、共空间、共频谱,以及共能量。如图3所示的是一种基于线性调频(LFM)信号的通信和雷达一体化波形设计案例。在发射端,通过在发射机构造出一段叠加通信基带信号、雷达探测信号的正交信号并发送至无线空间,经加性高斯白噪声(AWGN)信道,在接收端,接收机则通过构造匹配滤波机制,从一体化信号中提取通信基带信号,回归到普通的信号处理过程。而对于经目标反射回的一体化信号回波,同样通过匹配滤波并在已知发射信号的辅助下,回归到普通的雷达信号处理过程[14]。

图3 资源共用的多功能一体化系统
上述信号和信道资源共用的多功能一体化系统具有较高的资源利用率,能够节省时域、频域、空域、能域资源,但是也存在两点问题:一是各功能波束指向具有差异性,雷达、电子战波束指向敌方目标,通信波束指向己方目标,若采用同一波束承载三种功能,通信波束将指向敌方,这会增加通信信号被敌方截获的概率。二是各功能工作的射频模式不同,雷达一般工作于饱和区,通信工作于线性区。若要保障雷达与通信的同时使用,则雷达也需工作于线性区,这会制约雷达的发射功率。
为此,可采用资源复用的方式,从时、空、频、能多维度进行资源复用设计,如图4所示。从时域方面,通过采用脉冲或猝发、可变时隙长度、携带转发等方式减小信息传输时延,降低时域资源占用;在频域方面,采用多频段或正交频分复用(OFDM)调制方式实现多载波并行收发,提高频谱资源利用率;在空域方面,通过多波束分集、多输入多输出(MIMO)等技术实现多径分集收发;在能量角度,设计功率随距离自适应调整的通信方式,减少通信对系统能量的占用和消耗;在综合运用方面,基于空分、时分、频分相结合的组网协议,进一步提高资源利用率。

图4 多功能一体化系统信道资源复用方式
资源复用型的多功能一体化系统在时、频、空、能资源利用率方面不如资源共用型,但是系统使用更加灵活,更适合于实际作战使用。
4.3 安全防护与集成性能间的权衡
理想化的多功能一体化系统采用同一架构、通用的信号和信息处理设备满足通信、雷达、电子战多种功能的后端处理。然而,共用架构和处理设备后,原本无红黑分区的雷达、电子战功能也需要在信号流程上和通信功能一样进行红黑隔离设计,以避免无线入侵,但这会增加对雷达和电子战信号处理的复杂度,一定程度上制约系统的性能。
在实际应用中,通信系统往往进行红黑分区和多层加密的安全防护设计,如图5所示,物理层与链路层红黑分区以信号处理中的信道加密为分界,利用信道加密技术和电源/接地独立设计实现红黑隔离;网络层红黑分区以网络层加密为分界,通过网络层加解密技术实现网络层红黑隔离。针对多功能一体化系统非通信功能面临的红黑隔离问题,可在信号处理中对雷达与电子战进行旁路设计,减少系统工作在时分模式下雷达和电子战功能处理性能制约;在信息处理中对各功能进行边界防护设计,减少雷达和电子战功能在信息侧的处理性能制约,同时降低侦察、探测引入的无线入侵风险。

图5 多功能一体化系统安全防护结构
5 结语
通信、雷达和电子战功能一体化是舰载电子装备发展的主要方向,具备资源集约、协同增强、改善电磁兼容、提升隐身性能等诸多优点。国外海军相继开展了大量的相关项目研究。本文对通信、雷达和电子战功能要求分别进行了分析,指出三者在进行一体化设计时存在的权衡因素,并提出了相应的设计思路。由于通信、雷达、电子战系统在信号特性、信道特性和处理方式上的不同,在现阶段,理想化的一体化系统较难实现,实际中采取折中思路,在此基础上谋求系统的最优化综合性能。
