多旋翼无人机的基本组成和布局
2021-04-05
多旋翼无人机出现在21世纪初,它依靠若干旋翼为无人机的飞行提供升力和推力。多旋翼无人机的旋翼大小相同,分布位置对称,通过调节旋翼转速来调整实现无人机的悬停、前进等飞行动作。由于多旋翼无人机需要对旋翼的旋转速度进行精准的同步控制,因此往往选用电动机作为旋翼驱动装置。多旋翼无人机飞行稳定,操纵灵活,结构简单,体积小,重量轻,成本低,可以在人不易进入的各种恶劣环境工作,常被用于执行航拍取景、实时监控、地形勘探等任务。目前,无人机在快递等新兴领域也得到应用。鉴于以上因素,多旋翼无人机也最容易进入大众消费的领域,在消费领域得到广泛应用。
多旋翼无人机平台由机身、动力系统和控制系统等组成。其中,机架、支臂、起落架、任务载荷设备构成了机身主体,电机、螺旋桨、电调、电池构成了动力系统。飞控导航设备、机上数据链路构成了控制系统。
多旋翼无人机的旋翼个数大多数为偶数(少数无人机采用三旋翼),并对称分布在机体的前后、左右四个方向,多个旋翼处于同一高度平面或上下两个高度平面,且各旋翼的结构和半径都相同,相邻的旋翼安装正反螺旋桨,用以抵消陀螺效应和旋转扭矩。另外,还会根据实际任务需求搭载相关的设备,例如航拍时会用到图传发射器和接收器(也被称作FPV设备),能够实时地查看无人机拍到的画面。
动力系统
动力系统包含动力源、电机、电调、螺旋桨。
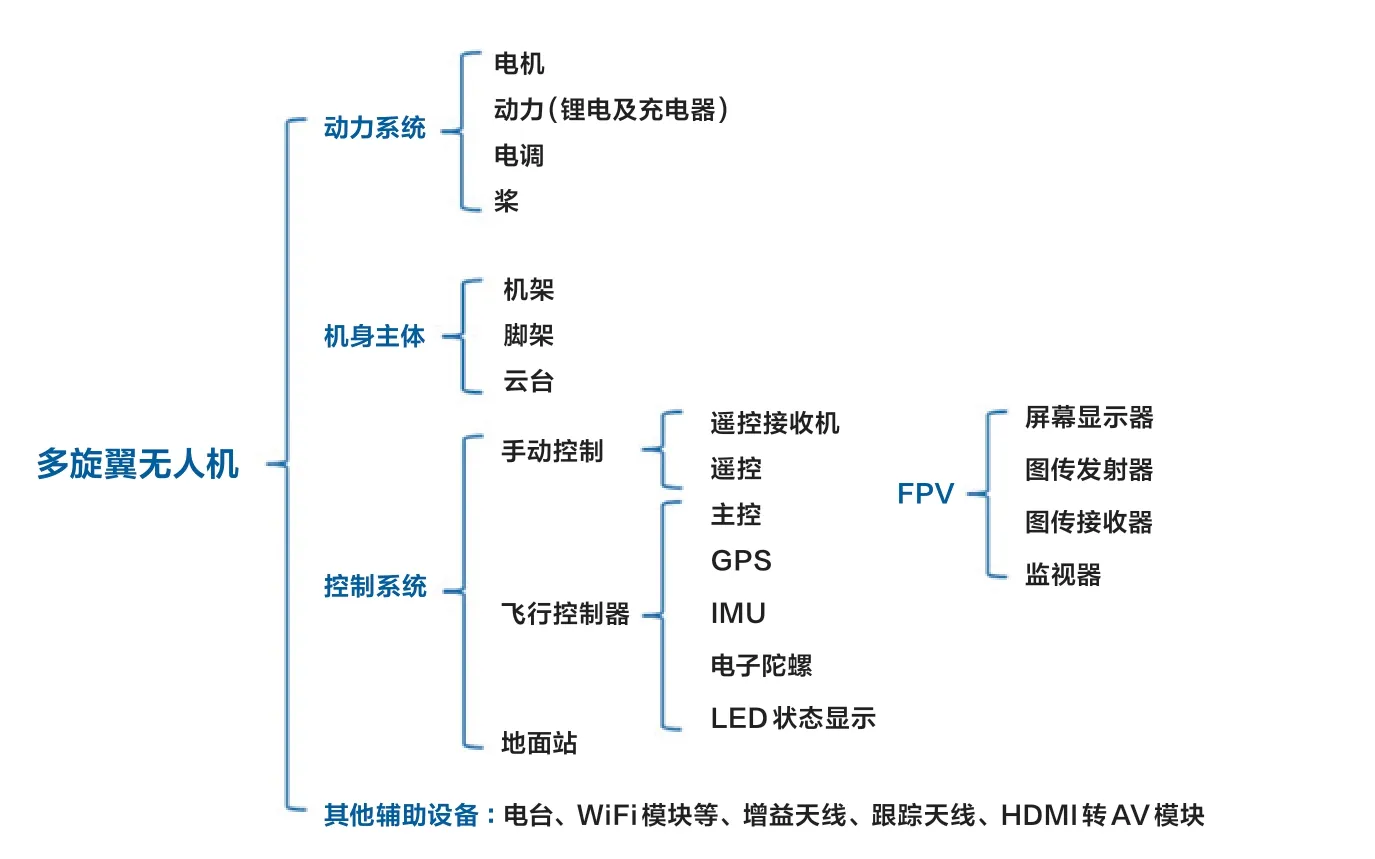
图1 多旋翼无人机组成
动力源
动力源是为无人机提供飞行动力的部件,一般分为油动和电动两种。近年来出现了氢燃料动力源。电动多旋翼无人机是最主流的机型,动力系统由电机、电调、电池三部分组成。无人机使用的电池一般都是高能量密度的锂聚合物电池,由于一些客观原因,理论上每300g锂电池可以为重量500g的无人机提供17min飞行时间。受制于现有的技术水平和成本,氢燃料电池、太阳能电池等暂时还无法普及。无人机主要在露天作业,对电机、电调系统的稳定性要求较高,需要定期进行检查、保养、防水、防潮。
电机
电机也称为“马达”,类似于人体中的四肢。电机一端固定在机臂的电机座上,另一端用来固定螺旋桨。电机将电能转化为机械能,带动螺旋桨旋转,为无人机产生推力。

图2 锂电池

图3 无刷电机
电机大致分为无刷电机和有刷电机。通常来讲,有刷电机是内部含有换相电刷的电动机。四旋翼无人机大多数采用无刷电机。无刷电机具有低干扰、低噪声、长寿命、低能耗、高效率的优点。微小型四旋翼无人机一般使用空心杯电机,空心杯电机在结构上突破了传统电机的转子结构形式,采用的是无铁芯转子,空心杯电机具有重量轻、体积小、能耗低、启动制动响应时间快的优点。值得注意的是,空心杯电机也分为无刷和有刷,一般选用无刷空心杯电机。
电调
电子调速器英文缩写ESC(中文简称电调),可以分为无刷电子调速器与有刷电子调速器。电子调速器是一个控制电机转速的控制装置。它根据接收的信号,通过控制器和执行器来改变电能供电的大小,作用就是将飞控板的控制信号,转变为电流的大小,以控制电机的转速。因为是给电机调节速度的,所以电调也分为有刷电调和无刷电调,电调上的几根线连接电机、电池、飞控,输入端2根线,接到电源正负极,输出端是3根线,接到电机上,信号线接到飞控上,给飞控供电和接收命令。电调里常说的A数,就是电流安培数。例如30A的电调,就是适用于电流30A的无刷电机。

图4 电调
螺旋桨
螺旋桨安装在电机上面,通过旋转将机械能转换为动能,提供升力让四旋翼无人机起飞。四旋翼无人机为了抵消螺旋桨产生的反扭力,相隔的螺旋桨旋转方向不一样,所以分为正反桨,正桨和反桨风都是向下吹。俯视时,顺时针旋转的是反桨,逆时针旋转的为正桨。
机身主体
机架
无人机的机架或机身指无人机的承载平台,一般选择高强度轻质材料制造,例如:玻纤、玻纤维、丙烯腈-丁二烯-苯乙烯塑料(ABS)、聚丙烯(PP)、尼龙、改性塑料、改性聚碳酸酯(PC)、树脂、铝合金等。无人机所有的设备都是安装在机架机身上,支架数量也决定了该无人机为几旋翼无人机。优秀的无人机机架设计可以让其他各个部件安装合理,坚固稳定,拆装方便。
脚架
脚架也称起落架,是整个无人机系统中唯一一个能够全部支撑起整架无人机的部件,在起飞和降落时起到支撑和缓冲的作用。
云台
无人机云台是无人机用于安装、固定摄像机等任务载荷的支撑设备。
云台控制系统主要是研究以单片机作为控制系统的主控芯片,结合各种传感器和执行机构而开发的云台专用控制系统。云台控制系统的功能主要包括两个方面,一是实现云台的自稳功能,也就是稳像功能;二是控制云台在空间方位的转动。若控制对象有可控部分,如相机的拍照和光圈的调节等,控制系统还应该对其有相应的控制功能。
云台就是两个直流电机组成的安装平台,可水平和垂直方向运动。但要注意区别于照相器材中的云台概念。照相器材的云台一般来说只是一个三脚架,只能通过手工来调节方位,而无人机所搭载的云台是通过控制系统,在远程控制其转动及移动的方向。云台转动速度是衡量云台档次高低的重要指标。云台水平和垂直方向是由两个不同的电机驱动的,因此云台的转动速度也分为水平转速和垂直转速。由于载重的原因,垂直电机在启动和运行保持时的扭矩大于水平方向的扭矩,再加上实际监控时对水平转速的要求要高于垂直转速。因此一般来说,云台的垂直转速要低于水平转速。
控制系统
飞控控制系统

图5 可以电动收起的起落架

图6 云台
飞控控制系统(简称飞控系统)是无人机的飞行控制系统,不管是无人机自动保持飞行状态还是对无人机人为操作,都需要通过飞控系统对无人机动力系统进行实时调节。一些高阶的飞控系统除了保证飞机正常飞行导航功能以外,还有安全冗余、飞行数据记录、飞行参数调整和自动飞行优化等功能。飞控系统是整个无人机的控制核心,主要包括飞行控制、加速计、气压计、传感器、陀螺仪、地磁仪、定位芯片、主控芯片等多个部件。

图7 飞控
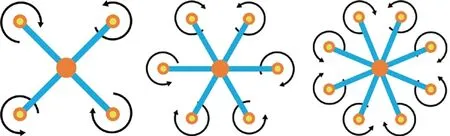
图8 “X”型旋翼气动布局与电机转向示意图

图9 “十”型旋翼气动布局与电机转向示意图
遥控系统
无人机遥控系统主要由遥控器、接收器、解码器、伺服系统组成。遥控器是操作平台,接收器接到遥控器信号进行解码,分离出动作信号传输给伺服系统,伺服系统则根据信号做出相应的动作。
多旋翼无人机气动布局分类
多旋翼无人机常见的气动布局有“X”型、“十”型、“H”型。
“X”型
“X”型是多旋翼无人机最基础、最常见的气动布局。“X”型气动布局是在飞行器前进方向的等分角度(左前和右前距机头方向均45°,机尾反向的右后和左后距机尾方向均45°)放置相反方向的电机和螺旋桨来抵消电机转动时产生的反扭力。
“十”型
“十”型多旋翼气动结构是最早出现的一种多旋翼气动布局之一,这种布局很简单,只需要改变轴向上电机的转速,即可改变飞行器姿态进而实现基础飞行。由于“十”型机构正前方的螺旋桨会在航拍时进入画面(俗称“漏桨”)造成不便,随着飞控的发展,“十”型布局逐渐被“X”型布局代替。
“H”型
“H”型与“X”型气动布局相似,优点在于通常设计为折叠结构,“H”型机构同时拥有“X”型布局的优点,所以,很受用户青睐。但是“H”型结构缺点也比较明显,要比同级别“X”型布局的无人机安装同样螺旋桨的飞机尺寸大,重量也重。
多旋翼无人机结构布局
四旋翼无人机

图10 “H”型气动布局示意

图11 四旋翼无人机
四旋翼是一种结构简单、飞行效率高的常见多旋翼结构,也是目前市场上保有量最多的多旋翼无人机类型。多旋翼玩具、小型航拍机一般都选用该结构。但是,四旋翼无人机没有动力冗余,在飞行中只要有一个电机停止转动,四旋翼无人机都会无法控制而出现“炸机”现象。

图12 六旋翼无人机

图13 八旋翼无人机
六旋翼无人机
理论上桨叶越大气动效率越高。从这个角度来看,大中型的多旋翼无人机应该采用四轴设计,但是四旋翼没有动力冗余,而六旋翼的设计可实现动力冗余,在飞行中一个电机停止转动仍然可以安全降落。所以,大中型无人机设计时多采用六轴结构。
八旋翼无人机
大型多旋翼无人机也可以采用更多旋翼数量,例如8轴,还有更多的像16轴等。
无人机的飞行还有很多的辅助设备,如地面站、定高定位模块等。随着科技的进步,更多布局新颖的无人机将会被制造出来。■

